KanCoyote sous toutes les coutures !
Contenu de jparbel
Il y a 37 élément(s) pour jparbel (recherche limitée depuis 30-avril 13)
Par type de contenu
Voir pour ce membre

#110554 Rampe et frein d'un servo-moteur
 Posté par
sur 16 juillet 2020 - 09:25
dans
Vigibot
Posté par
sur 16 juillet 2020 - 09:25
dans
Vigibot
@Mike118
Quels sont les effets de la rampe et du frein dans les commandes d'un servo-moteur, et quelles sont les unités (relatives ou absolues) ?
#110524 How to use the Google Assistant Voice on your robot
Posté par
sur 14 juillet 2020 - 10:06
dans
Vigibot
Hi Firened,
Very nice tuto, thanks a lot.
Do you have some type of loud speaker to recommend for a Minus one ?
And also for a good mic ?
jp@
#110183 Photos
Posté par
sur 12 juin 2020 - 08:08
dans
Vigibot
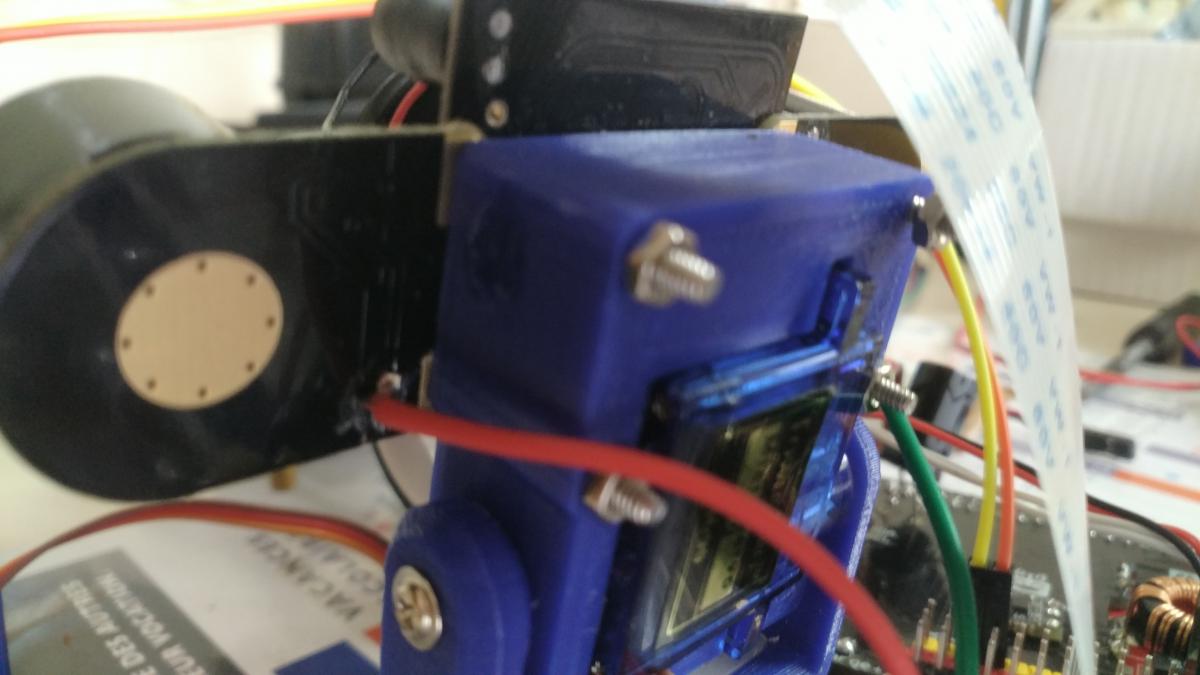
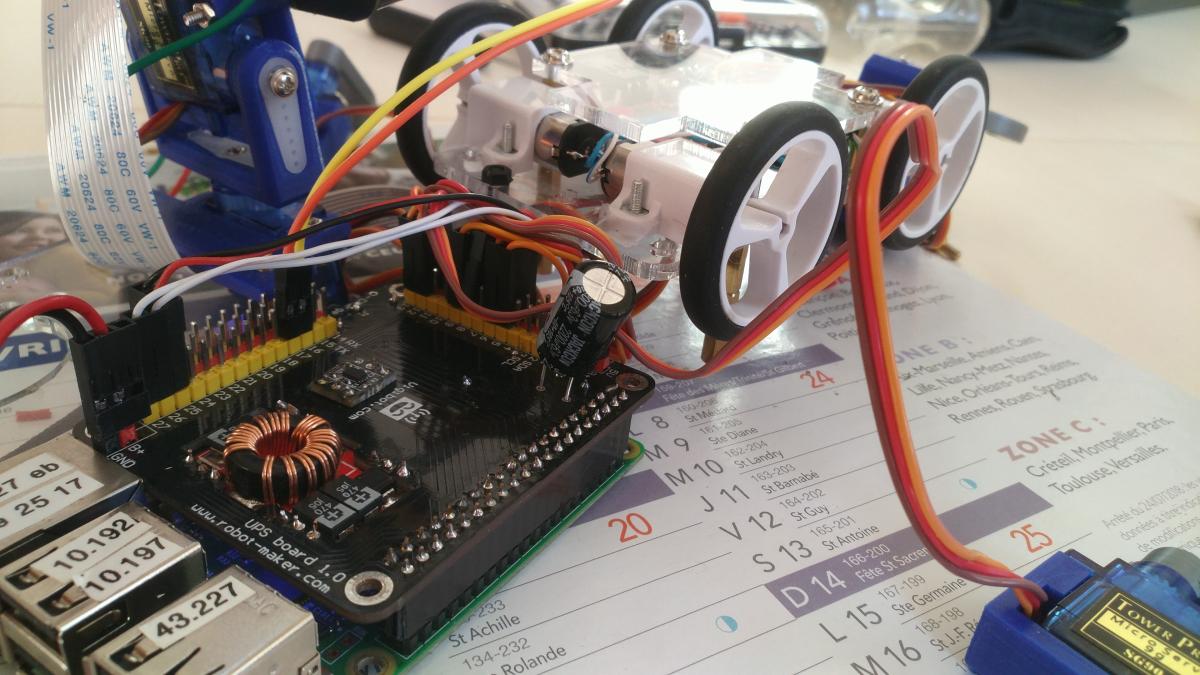
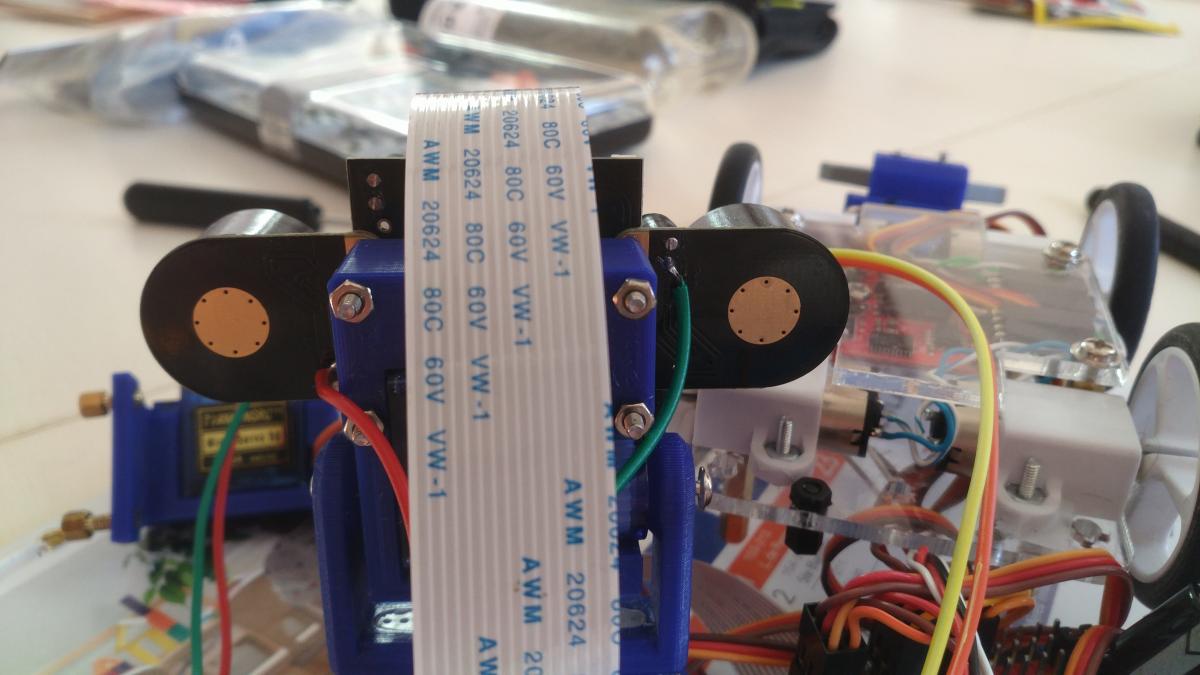
Salut
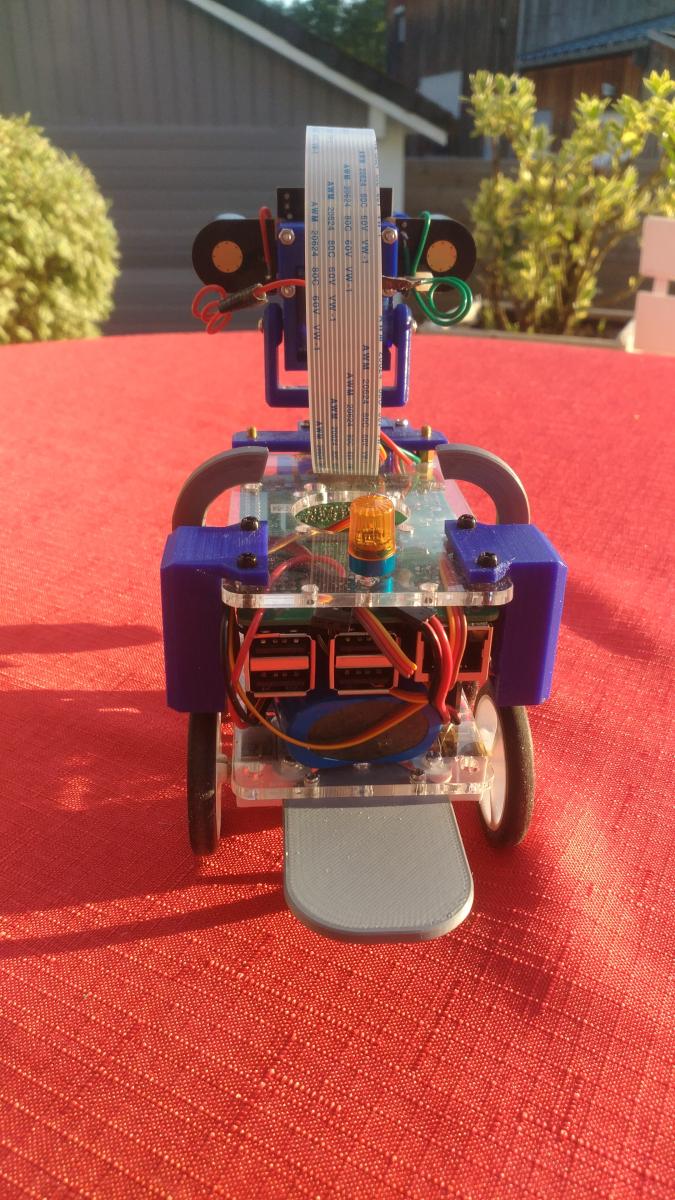
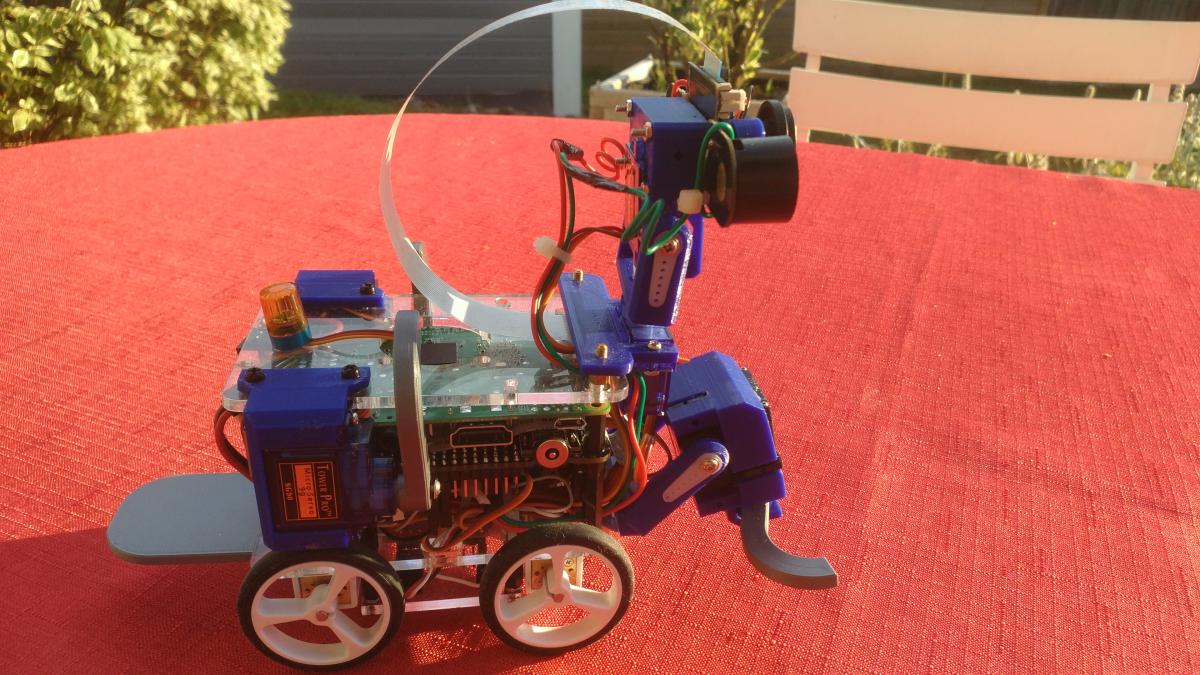
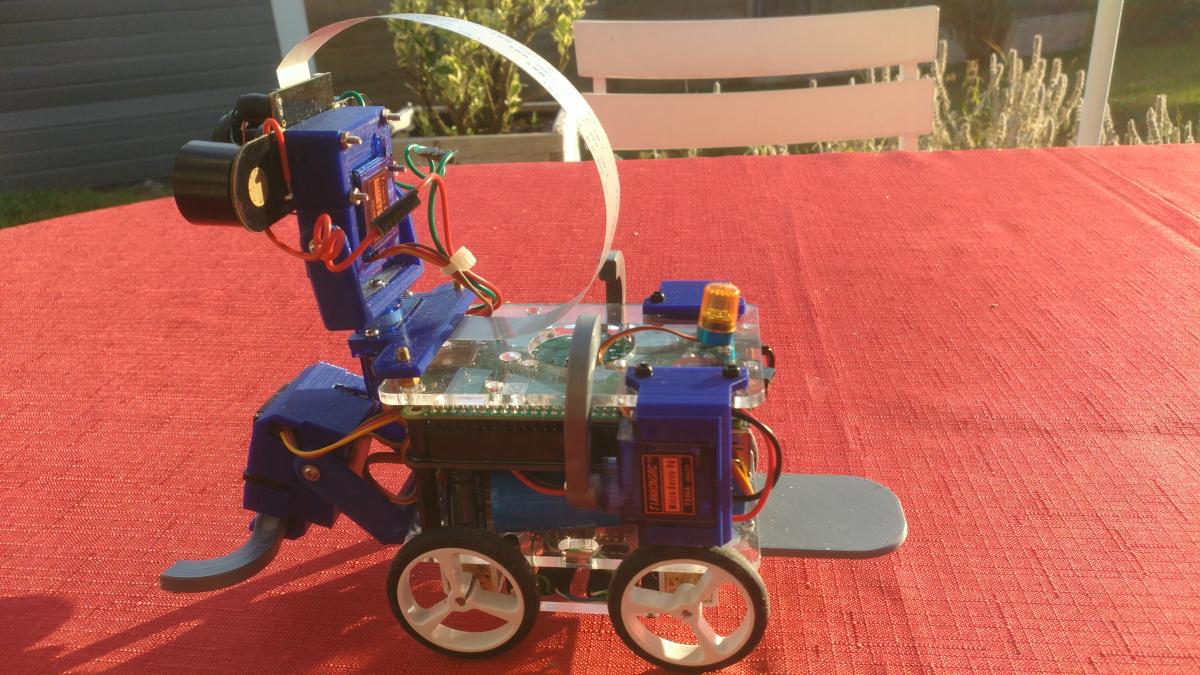
Voici quelques photos.
@+
Image(s) jointe(s)
#108865 Commande moteurs à partir de la fenêtre vidéo
Posté par
sur 13 avril 2020 - 08:51
dans
Vigibot
@mike118
Bonsoir Mike,
J'ai essayé de modifier le code pour commander les moteurs directement sur l'écran vidéo comme pour les servo-moteurs.
J'essaye de comprendre un peu le principe des commandes.
J'ai modifié uniquement le code de la clé à molette.
Pour l'instant, ça ne fonctionne bien sûr pas.
Est-ce que, à l'occasion, tu peux jeter un coup d’œil ?
#108830 Bras latéraux et état d'avancement
Posté par
sur 11 avril 2020 - 02:59
dans
Vigibot
Oui c'est très clair, c'est une bonne idée.
Non, effectivement, il faut que je trouve un radiateur.
Le robot fonctionne à merveille, merci encore pour tes conseils.
#108825 Bras latéraux et état d'avancement
Posté par
sur 11 avril 2020 - 10:09
dans
Vigibot
Tu peux me donner des précisions sur la break out board ?
J'ai retourné la RPI, mais du coup, elle est moins ventilée, bien que ce soit une V4, ça chauffe quand même ! pour ajouter un ventilo, c'est plus compliqué
#108817 Bras latéraux et état d'avancement
Posté par
sur 10 avril 2020 - 05:45
dans
Vigibot
Oui, j'ai tout ce qu'il faut pour souder, mon UPS est bleu, c'est la première géneration, mais je n'ai pas fait le hack (un peu chaud), j'attends le tien quand il sera dispo, celui-là ne marche pas très bien, mais je m'en contente pour le moment
Non, tu as eu une panne de batterie, curieusement elle n'a pas l'air de tenir très longtemps (moins d'une heure). En charge complète avec mon UPS, elle ne dépasse pas 92%, par contre je n'ai pas de ventilo, et la temp SoC monte à 52°C, est la raison ?
Tu as modifié la config des moteurs de roues ? hier soir plus rien ne fonctionnait et ce matin ça tournait dans tous les sens, maintenant ça marche bien. Est ce que je peux avoir accès à ces réglages ?
Je vais essayer de modifier la dispo comme tu me le conseilles, d'autant que les branchements ne sont pas faciles à modifier entre le hat et la plaque moteurs
#108795 Bras latéraux et état d'avancement
Posté par
sur 09 avril 2020 - 09:36
dans
Vigibot
Oui, merci Mike, j'avais vu ça.
Il faut que je teste mon Vigiboard hat, car je n'ai pas de mouvement sur mon bras installé, j'ai vérifié le servo : il est bon.
Je mettrai un miroir après dépannage, je verrai ça demain.
Bonne soirée
#108786 Bras latéraux et état d'avancement
Posté par
sur 08 avril 2020 - 08:17
dans
Vigibot
Je pense que la batterie peut se mettre plutôt entre le Vigiboard hat et l'UPS, je ne l'avais pas placée là pour ne pas trop sur-élever le robot, mais c'est mieux ainsi, effectivement.
En fait, j'ai assemblé dans l'ordre en partant du bas :la plaque moteurs, le hat, l'UPS et le PI, c'est correct ?
En passant, le Vigibot hat est vraiment très pratique, bravo !
J'ai généré le 'get-up' droit à partir d'Openscad, ce qui me permet d'apprendre le logiciel !
Est-ce que tu peux me configurer les bras (je n'en ai qu'un pour l'instant) sur les pins 12 et 13.
J'ai passé ma commande cet a/m.
Bonne soirée Mike
#108775 Bras latéraux et état d'avancement
Posté par
sur 08 avril 2020 - 08:03
dans
Vigibot
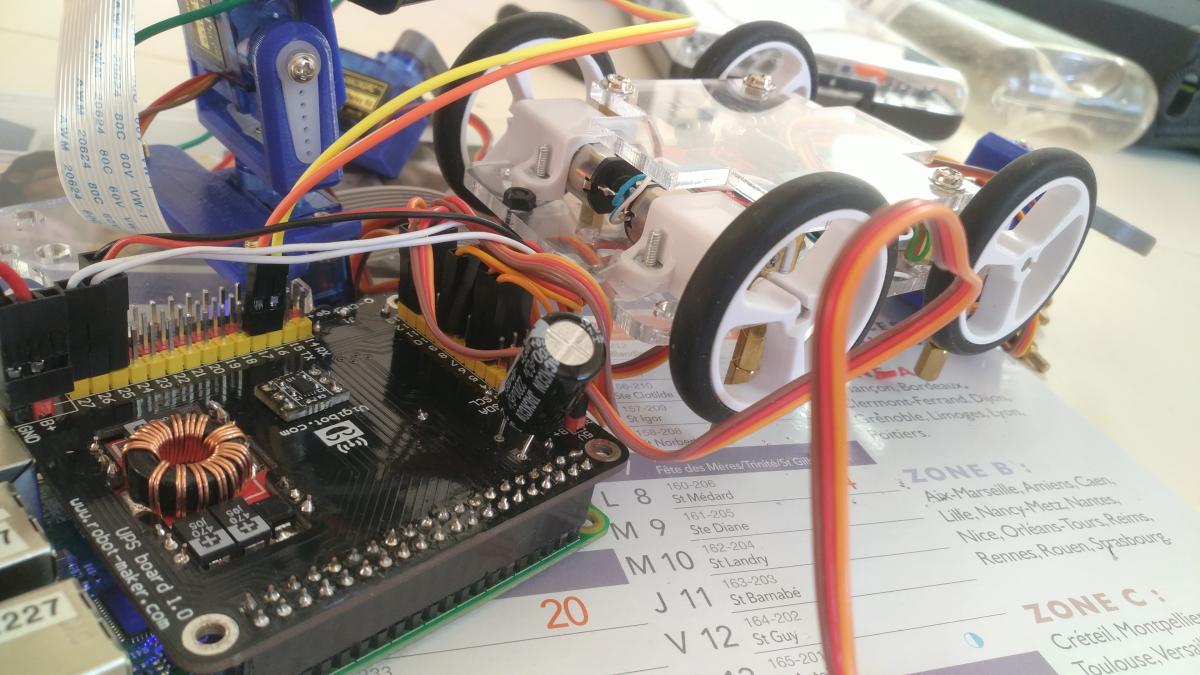
Voici la photo, en fait je manque sérieusement de vis et comme tu peux le voir je me suis débrouillé avec les moyens du bord, je veux bien acheter un lot de vis écrous si c'est possible.
J'ai également sur-élevé le support du servo de bras, de manière à e qu'il vienne au-dessus de la batterie.
Pour la config des bras, on peut utiliser 10 et 11 par exemple.
Dans le répertoire \vigicad-master\scad\printable, je pense qu'il manque le fichier get_up_servo_bracket_b.scad
Bonne journée
Image(s) jointe(s)

#108769 Bras latéraux et état d'avancement
Posté par
sur 07 avril 2020 - 10:46
dans
Vigibot
@Mike118
Bonsoir Mike,
Ca y est, j'ai enfin presque toutes mes pièces 3D
La pince fonctionne bien, c'est super ! Par contre, je n'ai pas trouvé comment alimenter les bras latéraux (sur quelles pins ?)
Ou peut-on mettre la batterie ? je l'ai placée à l’arrière du Minus, du coup ça gène la fixation des servos de bras, j'ai l'intention de refaire les supports en agrandissant la plaque de fixation.
Je te joins une photo, c'est pas encore très beau, ça reste encore du provisoire, mais qui a l'avantage de fonctionner dans un premier temps. ça va s'arranger avec le temps.
La batterie tient avec du scotch ! et la camera est fixée avec du fil elec, par les temps qui courent, je n'ai pas trouvé de vis M2 aussi longues.
J'ai placé en haut un Nodemcu 8266 en prévision, mais il n'est pas encore alimenté.
J'ai mis un RPI4 du coup, je n'ai plus de latence, c'est top.
Je vais commander un servo 180° pour le bras latéral droit, est-ce que tu peux ajouter les 4 vis écrous de fixation de la camera ?
Bonne soirée.
#108575 Réglage caméra
Posté par
sur 29 mars 2020 - 10:17
dans
Vigibot
Merci Mike
Il n'y a pas grand monde apparemment sur le chat.
En fait les commandes sont plus "brusques" à partir du phone, c'est plus souple à la souris, mais c'est peut-être normal.
@+
#108556 Réglage caméra
Posté par
sur 29 mars 2020 - 01:39
dans
Vigibot
@Mike118
Salut Mike,
Ca y est, j'ai reçu et assemblé les supports de caméra, c'est super !
Est-ce que tu peux jeter un coup d'oeil sur les réglages, je trouve que les mouvements sont un peu brusques.
Tu as toujours les droits.
Je n'ai pas monté pour l'instant les capteurs infra-rouge, j'attends ma nouvelle batterie.
Peut-être pouvons-nous nous parler directement sur vigibot.
Tiens_moi au courant.
Je te remercie.
#108374 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 24 mars 2020 - 09:50
dans
Vigibot
@Snyp54 merci pour ton complément de réponse.
@ Mike118 au sujet du pilotage à partir du phone, ce qui m'a induit en erreur c'est ta réponse : le mode joystick : tu cliques sur la X et tu le déplace, ça déplace ton robot et dès que tu relâche ça s'arrête.
Je cherchais une croix, d'où ma confusion avec les croix de commande de la caméra.
J'ai commandé une batterie, tu as une idée du délai d'expédition ?
#108329 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 23 mars 2020 - 12:06
dans
Vigibot
Décidément je n'ai pas de chance ! le mode joystick ne marche pas chez moi (ou je n'ai pas compris)
J'ai 2 croix, une bleue fixe au centre et une jaune que je déplace avec le doigt, mais KanCoyote n'obeit pas !
La boutique est toujours ouverte pour commander une batterie ?
#108313 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 22 mars 2020 - 06:37
dans
Vigibot
Ca m'a l'air pas mal du tout, est ce qu'il y a une sauvegarde possible de tes réglages ?
Pourquoi les commandes à partir de l'écran tactile de mon téléphone sont parfois permanentes (l'ordre donné continue si on enlève le doigt de l'écran) et parfois non.
Que me conseilles-tu comme batterie, j'ai mis une lipo 2400mah elle est un peu faiblarde, elle n'a pas tenu la durée de tes réglages.
Merci encore pour ton intervention.
#108311 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 22 mars 2020 - 06:04
dans
Vigibot
non, je n'avais pas vu !
#108308 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 22 mars 2020 - 04:24
dans
Vigibot
je suis à ta disposition
#108297 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 21 mars 2020 - 10:32
dans
Vigibot
Pour l'impression, normalement c'est en cours sur l'imprimante d'un ami, mais à l'occasion, pourquoi pas, je n'avais pas vu cette possibilité.
Pour info, sur la page du Service d'impression de la boutique il est fait mention du logiciel PrusaControl, j'ai l'impression qu'on ne peut plus le télécharger, par contre il serait remplacé par PrusaSlicer
Pour les réglages des moteurs seulement pour l'instant, c'est OK, demain si tu veux.
Bonne soirée.
#108281 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 21 mars 2020 - 11:36
dans
Vigibot
Merci de ta proposition, mais je pense que c'est encore trop tôt.
Je devais imprimer les différentes pièces au Fablab, mais tout est stoppé avec le confinement, j'ai juste les plaques découpées au laser.
J'ai le Geekworm V1.0 non modifié pour l'instant + le vigibot hat, c'est un peu maigre !
Je n'ai donc pas encore les supports de servo pour lui donner un peu plus de vie, il se contente juste de rouler avec une caméra fixée avec du scotch, c'est un début mais ca reste très 'artisanal' !
#108276 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 20 mars 2020 - 10:22
dans
Vigibot
Bon, j'ai repris la config préconisée.
Ca fonctionne bien (Av, Ar, Dx, Gx), mais il faut malgré tout que je règle NEUTREAV = 0 pour les 2 sorties, sinon au 1ier appui sur marche AV seules les roues de Gx commencent à tourner et c'est au 2ieme appui que toutes les roues tournent mais avec un décalage de vitesse entre les Gx et les Dx.
Avec NEUTREAV = 0 tout rentre dans l'ordre.
Ai-je fait encore une erreur ?
#108275 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 20 mars 2020 - 09:23
dans
Vigibot
Effectivement, mon branchement n'est pas bon, je suis branché Gx-Dx sur la même sortie de driver, j'avais essayé l'autre config (Av-Ar) sur la même sortie mais ça ne semblait pas fonctionner correctement non plus.
Je reprends la bonne config avec le bon protocole et ça devrait marcher.
Merci, en tout cas pour tes conseils et ta patience !
#108269 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 20 mars 2020 - 06:24
dans
Vigibot
Je suis en train de modifier les neutres, ça à l'air de s'arranger.
Est ce la bonne manip ?
En réglant les NEUTREAV à 0 et les NEUTREAR à -20, sur les 2 groupes, ça fonctionne bien, sauf que la première impulsion en AV ou en AR n'est pas effective, il faut cliquer une 2ième fois pour que les 4 roues commencent à tourner et ensuite on accelere normalement.
#108268 Driver convertisseur de moteurs CC en servomoteurs
Posté par
sur 20 mars 2020 - 05:59
dans
Vigibot
Oui, j'ai bien 4 roues avec des moteurs pololu achetés sur la boutique.
En fait, lorsque j'appuie sur Avancer seules les 2 roues AV tournent, si j'augmente la vitesse, les roues AV tournent plus vite et les roues AR se mettent à tourner à la première vitesse, d'où la différence de vitesse entre les 2 roues AV et les 2 roues AR.
Même phénomène en faisant une marche AR.
Ca perturbe les déplacements et bien sûr les virages.




