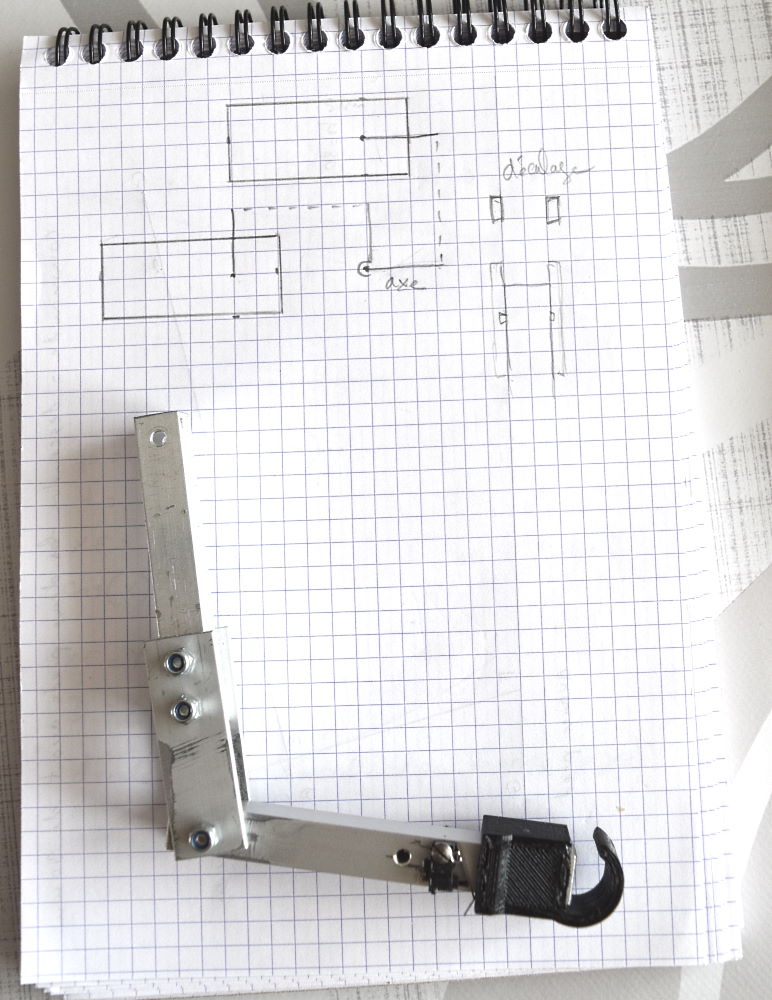
Oui, mais il serait aussi possible de mettre entre les deux roues dentées une barre droite avec des dentures de chaque côté.
Et derrière un système qui guide la barre pour quelle ne se décale pas. On aurait un vrai mouvement linéaire.
Jean
Il y a 97 élément(s) pour Jean Brunet (recherche limitée depuis 29-avril 13)
 Posté par
sur 07 avril 2024 - 09:36
dans
Sons et lumières
Posté par
sur 07 avril 2024 - 09:36
dans
Sons et lumières
Oui, mais il serait aussi possible de mettre entre les deux roues dentées une barre droite avec des dentures de chaque côté.
Et derrière un système qui guide la barre pour quelle ne se décale pas. On aurait un vrai mouvement linéaire.
Jean
Posté par
sur 05 avril 2024 - 02:34
dans
Sons et lumières
Oui, mais je pense qu'il a eu des soucis avec les pistons qui pouvaient coincer, c'est quand même assez rudimentaire comme sifflet.
Un moteur linéaire aurait été mieux, par contre le prix...
Jean
Posté par
sur 05 avril 2024 - 11:13
dans
Sons et lumières
Bonjour,
J'ai trouvé le Robot Slide Whistle Orchestrion vraiment original !
Un sifflet transformé en trombone à coulisse commandé par des servos de modélisme.
Il y a encore des perfectionnements à venir, mais l'idée est excellente.
Robot Slide Whistle Orchestrion - mitxela.com
Jean
Posté par
sur 15 janvier 2021 - 11:09
dans
Machines de fabrication
Bonjour,
Voici une très courte vidéo sur ma CNC, d'une surface de 300 * 200 environ.
Elle reprend plusieurs descriptions trouvées sur le web, un bâti issu d'une CNC russe, le système de guidage en X extrapolé d'un kit imprimé en 3D. Le chariot inférieur glisse sur deux tiges de 10 mm. Les écrous tracteurs sont fixés par serrage entre deux pièces par sécurité.
L'envoi du GRBL est assuré par un Raspberry Pi 2 B muni d'un écran LCD tactile.
J'ai fait mes tests sur la table, en m'aidant d'une petite réalisation à base de lecteurs DVD de récupération.
Le Raspberry Pi 2 B ne permet pas de faire tourner les derniers programmes de CNC, aussi j'ai choisi d'en écrire un.
J'ai écrit une interface graphique sous Python avec la librairie Tkinter autour d'une routine d'envoi en streaming trouvée sur Github qui marche parfaitement.
Le programme permet de caler la CNC en XYZ pour le point zéro et de bouger les 3 axes. La ressemblance avec GRBLcontrol est évidente.
Le programme renvoi le numéro de la ligne envoyé dans le buffer d'entrée et garde toujours le buffer plein pour ne pas sauter une instruction.
Je pourrai publier des photos si vous voulez.
Jean
Posté par
sur 15 janvier 2021 - 10:50
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Désolé, c'est ce lien. Pour la CNC je vais aller vers une autre discussion.
HowBoston Dynamics' Spot Robot Learns to Dance! - YouTube
Jean
Posté par
sur 15 janvier 2021 - 02:46
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Sur cette vidéo on assiste à la programmation de spot, la dance est privilégiée ici.
https://www.youtube....Au2QHD_gUU&t=1s
Je suis toujours aussi émerveillé de son agilité et de son équilibre.
Jean
Posté par
sur 15 juin 2020 - 03:39
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 15 juin 2020 - 01:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui, j'ai vu, merci.
Il est mieux construit que le mien, d'ailleurs je commence les plans d'un autre avec des pattes en aluminium et un senseur en bout de patte.
La "chaussure" en bout de patte coulisse sur 1 mm et vient butter sur le switch.
Posté par
sur 15 juin 2020 - 01:36
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ah oui, intéressant !
Les servos des pattes sont fixés avec des pièces métalliques ce qui leur donnent une bonne rigidité.
Posté par
sur 15 juin 2020 - 12:07
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Voici les premiers pas de Rantanplan sur la table. C'est encore assez poussif et j'ai des problèmes de flexions sur les pattes.
Je ne me suis servi que des fonctions de cinématique, bien plus pratiques que les angles.
Posté par
sur 14 juin 2020 - 09:45
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
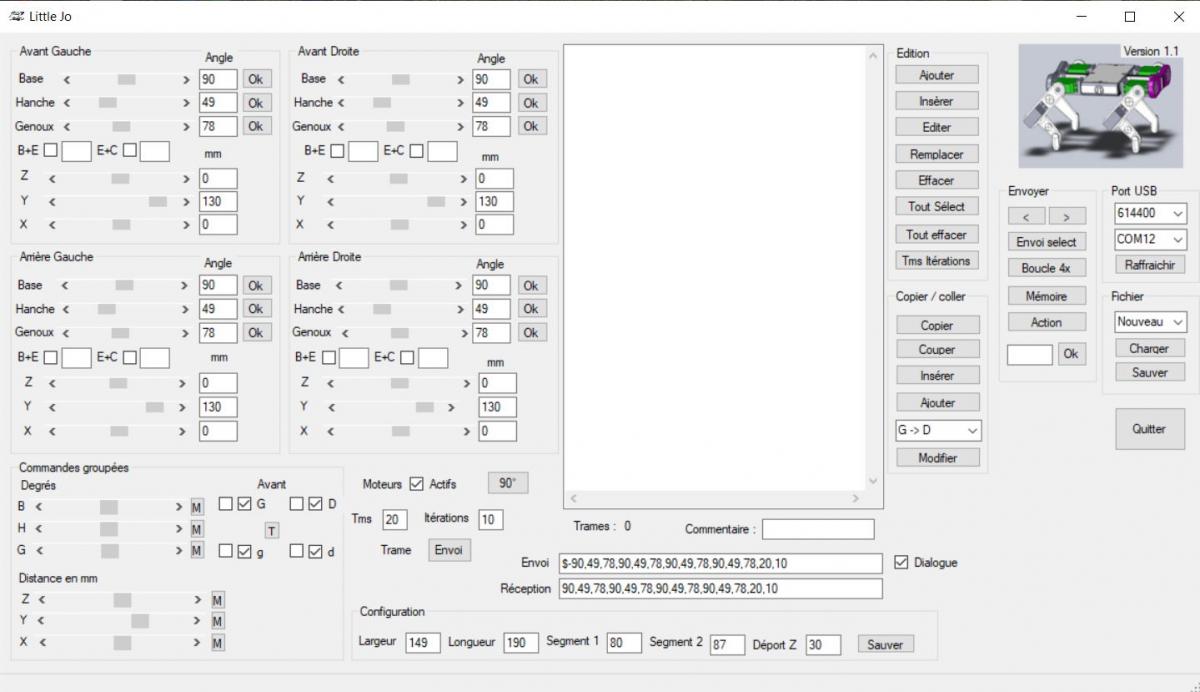
J'ai implanté de la cinématique X,Y,Z sur Little Jo.
Chaque patte peut être commandée séparément ou groupée.
Par exemple si le robot est dans une position penchée vers l'avant, je peux modifier sa hauteur sans changer son attitude.
Je vous mets une copie écran. J'ai encore quelques petites choses à ajouter, et ensuite si il vous intéresse je le mettrai en téléchargement.
Posté par
sur 14 juin 2020 - 09:38
dans
Impression 3D et Imprimantes 3D
Bonjour,
J'en ai un peu l'expérience.
Il a tendance à coller sur la tête et peut déposer des patés sur la pièce.
Si ta CR-10 S peut monter jusqu'à 250 ° tu peux l'imprimer.
Souvent on monte un peu la température, plus que donne le fabricant pour qu'il soit fluide. Il faut aussi un peu de refroidissement, 30 %.
Un conseil, fait des petits essais avant de te lancer dans des pièces difficiles.
Perso, je le déconseille pour des pièces qui doivent subir des contraintes, un PLA de eMotion tech est bien supérieur.
Sur mon robot imprimé en PETG les pattes restent trop souples.
Posté par
sur 13 juin 2020 - 06:28
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Un futur projet pour Oracid ?
Posté par
sur 13 juin 2020 - 09:46
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci pour ton code, je vais voir comment m'en servir pour Rantanplan.
Je te signale une petite erreur ici
def print_inertias(slef,xx,xy,xz,yy,yz,zz,mass):
C'est self, si tu veux te corriger.
Mon robot Rantanplan est un quadripéde qui a des servos dans les pattes ce qui donne des masses qui se baladent.
https://www.robot-ma...094-rantanplan/
Posté par
sur 12 juin 2020 - 06:43
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'ai réussi à programmer une routine pour le Z qui conserve la hauteur Y constante.
Voici une petite vidéo qui montre que cela fonctionne assez bien, même pour une distance allant jusqu'à +- 80 mm
Posté par
sur 10 juin 2020 - 10:49
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour,
Je pense qu'on pourrait s'inspirer de ce modèle pour réaliser une patte de robot par exemple, ou un bras robotisé.
https://www.thingive...m/thing:3096135
Jean
Posté par
sur 07 juin 2020 - 05:30
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
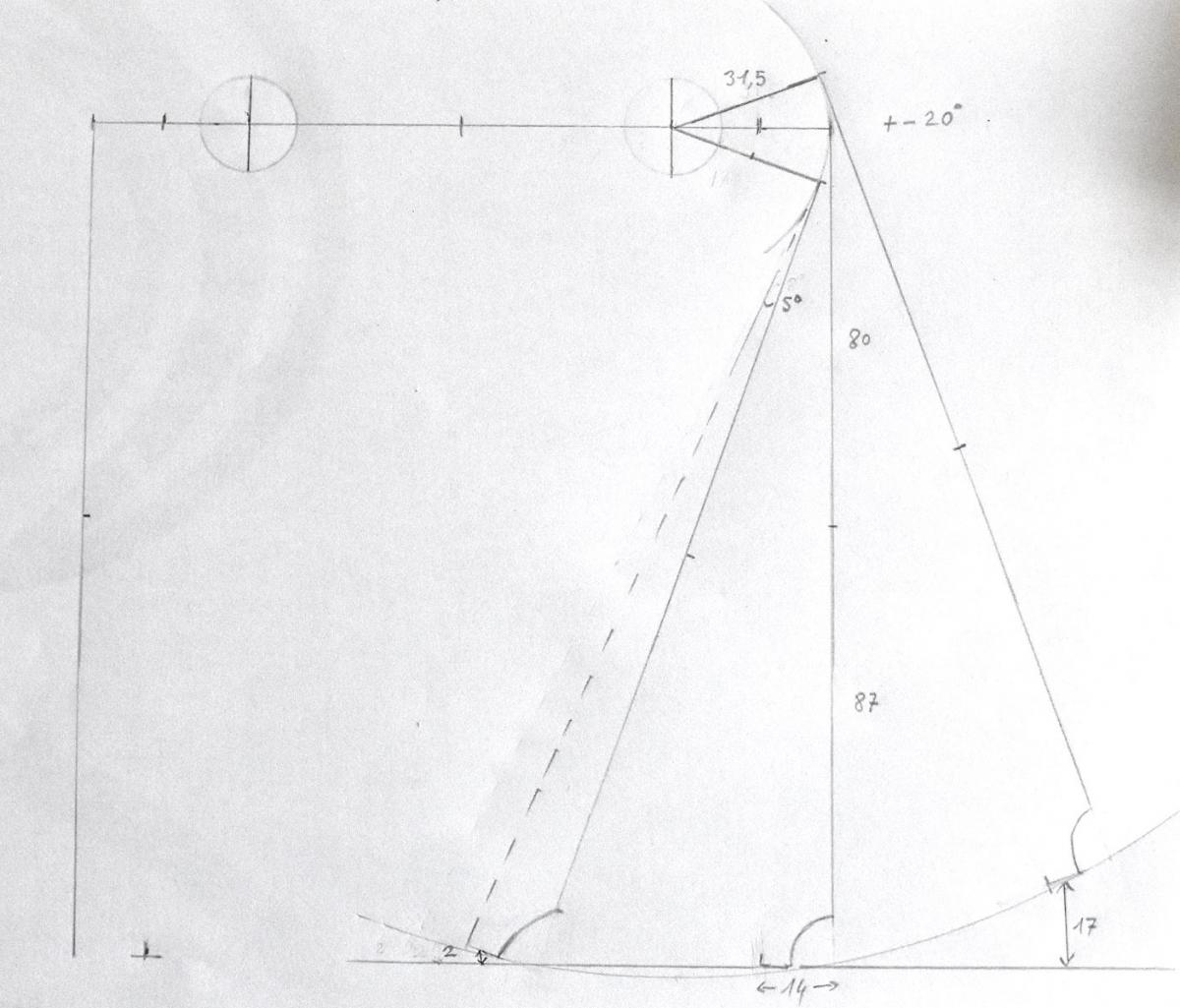
Voici un schéma qui montre le problème du "bras de levier" du servo de rotation de la hanche et du décalage du pied vers l'intérieur.
Le centre du grand cercle qui passe sous les pattes est le centre de rotation du servo.
La différence de correction pour un même angle positif ou négatif du servo est importante.
Le décalage de la patte au sol est de 5°, il y a la aussi une petite correction à faire.
Pour éviter le bras de levier c'est moins évident, mais en prolongeant l'axe du pivot de la hanche il doit y avoir une possibilité.
Dans un futur quadripéde je mettrais des pieds ronds dans l'axe de la patte, ce sera plus simple.
Posté par
sur 07 juin 2020 - 08:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Pour les inclinaisons latérales, j'ai le problème des servos d'épaule qui ajoutent un bras de levier de 25 mm quand ils pivotent.
Du coup les angles d'inclinaison ne sont pas réglés avec la bonne longueur des pattes.
Je vais ajouter une correction mais la partie qui touche le sol n'est pas dans le même alignement que celle qui est attachée au servo d'épaule.
Logiquement cela doit changer à la correction à apporter sur la longueur totale du bras.
Posté par
sur 06 juin 2020 - 04:12
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Nouvelle vidéo qui montre que les enchaînements restent assez souples même quand le déport est important.
L'ESP32 calcule 20 itérations d'une position à l'autre. Je ne m'attendais pas à ce que le robot conserve les pattes au même endroit sur le sol.
J'ai calculé les positions par trigonométrie et je les ai rentrées dans Little Jo. La hauteur des pattes est la seule commande pour tous les calculs.
Posté par
sur 05 juin 2020 - 06:55
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Une vidéo très intéressante sur ce robot insecte. Le mouvement des pattes avec des actuateurs vaut le coup d'oeil.
Posté par
sur 04 juin 2020 - 09:32
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est un programme en python qui m'a donné les angles et la distance d'avancement du pied. J'ai ensuite mis les angles dans Little Jo
Posté par
sur 04 juin 2020 - 09:30
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Voici une vidéo qui montre comment j'ai résolu le problème du basculement en avant et en arrière.
Il y a une petite démo géométrique et le résultat avec Rantanplan
Posté par
sur 03 juin 2020 - 08:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Thot, et oui en remontant le sol, on retrouve le même angle et l'avance du pied = hypotenuse - grand côté.
Je n'y avais pas pensé.
Posté par
sur 02 juin 2020 - 09:43
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
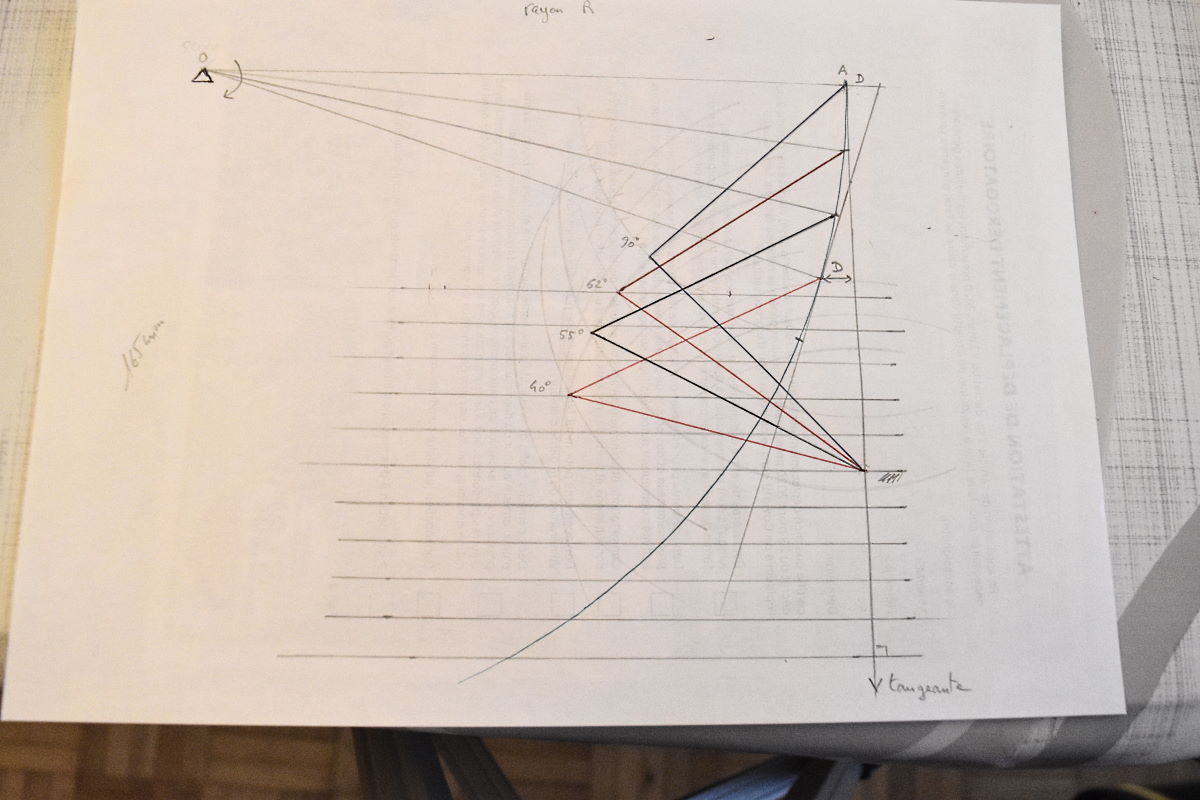
Je pense à cette solution simple.
Considérons le petit triangle rectangle en haut à droite avec le côté adjacent D. L'angle aigu est égal à l'angle O sur le papier. Le grand côté qui va de l'angle droit à l'intersection des tangeantes est égal à la distance vers le sol / 2.
Donc si on veut faire piquer l'avant du robot de 6 cm ce qui donne 18° environ, on a pour calculer la distance d'avancement des pattes l'angle aigu 18°et le grand côté de l'angle droit = 3cm
Il faut ensuite trouver le petit côté.
Posté par
sur 02 juin 2020 - 09:18
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le bras supérieur fait 8 cm, le bras inférieur fait 8.5 cm. Le servo tient plus de 10 kg, c'est tout bon.
Je vous soumets un problème. J'étudie le mouvement suivant. Le robot a les pattes fixes au sol, et il bascule sur l'avant. L'arrière doit pivoter mais ne change pas de hauteur.
Pour déterminer l'angle de pivotement il suffit de considérer un triangle rectangle dont le petit côté est la distance vers le sol et le côté adjacent la longueur du robot. On a l'hypoténuse puis l'angle. Oui mais le robot pivote sur un cercle. Et les pattes sont fixes. (voir schéma). Tout se passe pour le robot comme s'il avançait les pattes vers l'avant et trouver cette distance me pose problème. On doit pouvoir en calculant l'angle d'intersections des deux tangeantes et le point d'intersection. Mais cela est hors de ma portée.
Y-a pas un truc plus simple ?