Posté par
Posté par
Le problème c'est que je ne sais pas encore 
Je pense que ces LED UV consomme comme une LED normal 20mA , peut être un peu plus. Ce sont des LED de 5mm.
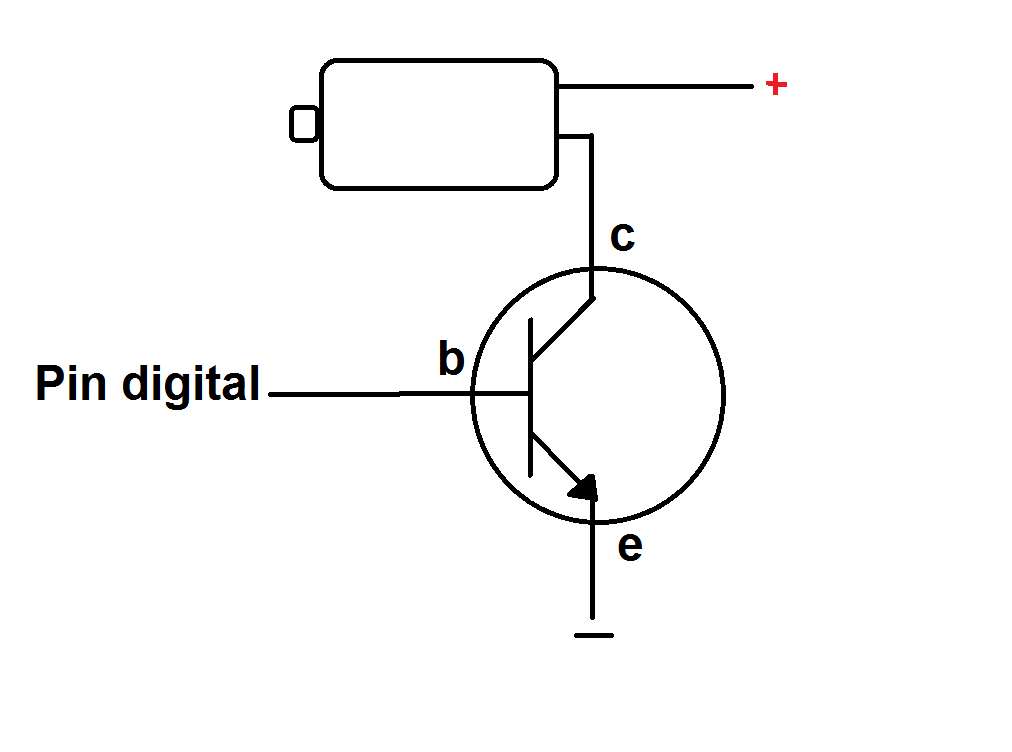
Mais si une LED consomme 20mA , vous pensez q'un transistor pourrais suffire ? ma carte arduino ne risque rien ?