Contenu de swolf
Il y a 616 élément(s) pour swolf (recherche limitée depuis 01-mai 13)
Par type de contenu
Voir pour ce membre
#52175 Mon premier robot Arduino
 Posté par
sur 15 décembre 2012 - 02:22
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 15 décembre 2012 - 02:22
dans
Robots roulants, chars à chenilles et autres machines sur roues
#50488 une horloge murale digital sans afficheur ;)
Posté par
sur 17 novembre 2012 - 02:21
dans
Hack mod customisations et autres modifications
$Tu as oublié le lien je crois ^^
Effectivement
 le voici: http://www.youtube.com/watch?v=GNlN5zRHiCI
le voici: http://www.youtube.com/watch?v=GNlN5zRHiCI
#50463 une horloge murale digital sans afficheur ;)
Posté par
sur 16 novembre 2012 - 11:05
dans
Hack mod customisations et autres modifications

bon courage!
EDIT: il y a aussi ça qui est pas mal, fait avec de la récup
#50115 robot anti frelon asiatique
Posté par
sur 05 novembre 2012 - 09:51
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Quelques liens qui m'ont semblé intéressants (je n'ai pas fait des recherches trop approfondies non plus
 )
)http://sanitaire-api...=136&Itemid=174
http://buschmeier.or...oundperception/
http://cordis.europa.eu/search/index.cfm?fuseaction=proj.document&PJ_RCN=10782300 ==> projet de détection de la periode de fécondation des vaches en se basant sur les phéromones
En remuant un peu j'ai trouvé aussi des articles interessants sur des "phéromones robotiques":
http://pherobot.webs.com/
http://www.google.fr/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0CD4QFjAB&url=http%3A%2F%2Fciteseerx.ist.psu.edu%2Fviewdoc%2Fdownload%3Fdoi%3D10.1.1.60.9950%26rep%3Drep1%26type%3Dpdf&ei=ISiYUOisCoaEhQeO5oHYBg&usg=AFQjCNGjIziNyX_HBwfjdGKB8LYytN61zA&cad=rja (attention pdf)
http://ieeexplore.ieee.org/xpl/login.jsp?tp=&arnumber=4150086&url=http%3A%2F%2Fieeexplore.ieee.org%2Fiel5%2F4149990%2F4126184%2F04150086.pdf%3Farnumber%3D4150086
#50057 Pad NES sur Arduino
Posté par
sur 01 novembre 2012 - 07:51
dans
Electronique
oui, tout semble bien connecté.. des fois j'ai bien les huits bits (toujours tous a 1 même quand j'appuie sur les boutons), mais des fois il n'y en a que 7.
J'ai tenté de rallonger un peu les "delay" mais ça n'a rien donné.
Je me demande si le pad fonctionne bien.. et je n'ai bien entendu pas de NES pour essayer.

y'a pas de raisons qu'il ne marche pas, sauf si le registre a brulé (tu peux facilement vérifier) vérifie bien que les pins correspondent entre le code et ton circuit
#50011 Pad NES sur Arduino
Posté par
sur 29 octobre 2012 - 08:59
dans
Electronique
Merci beaucoup pour cette réponse et ce lien. (en plus il y a même le bout de prog qui va avec.
)
edit : chez moi ça ne fonctionne pas. tout a l'air bien connecté, j'ai pompé le bout der code fourni, mais ça ne retourne que des "1111111" (notez par ailleurs qu'il n'y a que sept "1", il m'en manque donc un.)
t'as tout bien branché? normalement ça te retourne un zero correspondant au bouton en train d'être appuyé... Vérifie bien tes connections
#50007 Pad NES sur Arduino
Posté par
sur 29 octobre 2012 - 07:08
dans
Electronique
Je viens de tester et ça marche (ça me donne envie de faire un petit contrôleur MIDI à base de NES moi
)
#48643 robot autonome
Posté par
sur 09 septembre 2012 - 06:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
Celui de l'UCP, à Gennevilliers ? J'ai toujours voulu y faire un tour, mais j'ai pas encore eu le temps ni quelque chose à y faire construire. P't'etre pour un autre de mes projets quand Froggy sera fonctionnel !

Oui celui là! C'est vraiment cool, on peut tout faire: le matériel à disposition est impressionnant pour quelque chose d'ouvert et l'équipe est très sympa!
#48630 robot autonome
Posté par
sur 09 septembre 2012 - 01:35
dans
Robots roulants, chars à chenilles et autres machines sur roues
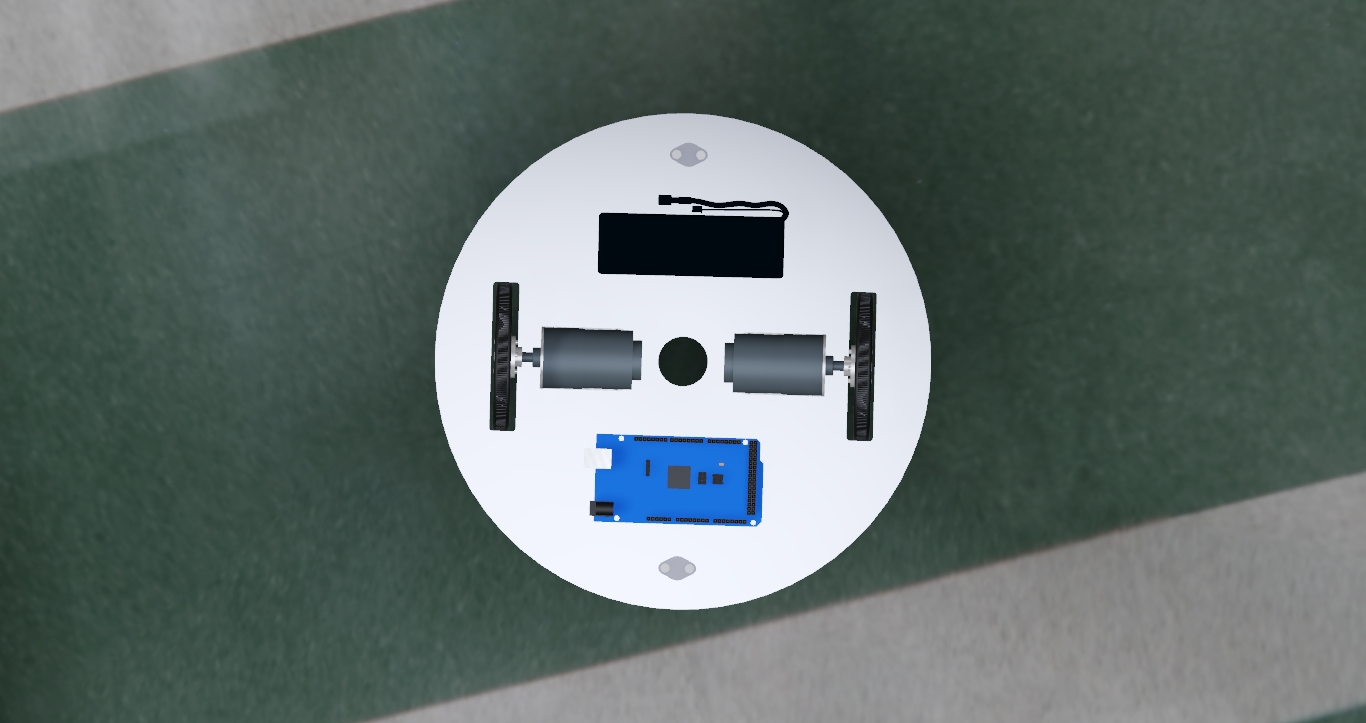
) étaient bons et que tous les composants s'assemblaient sans problèmes.Voici les images+la vidéo de présentation (360° et petit effet de zoom sympa
)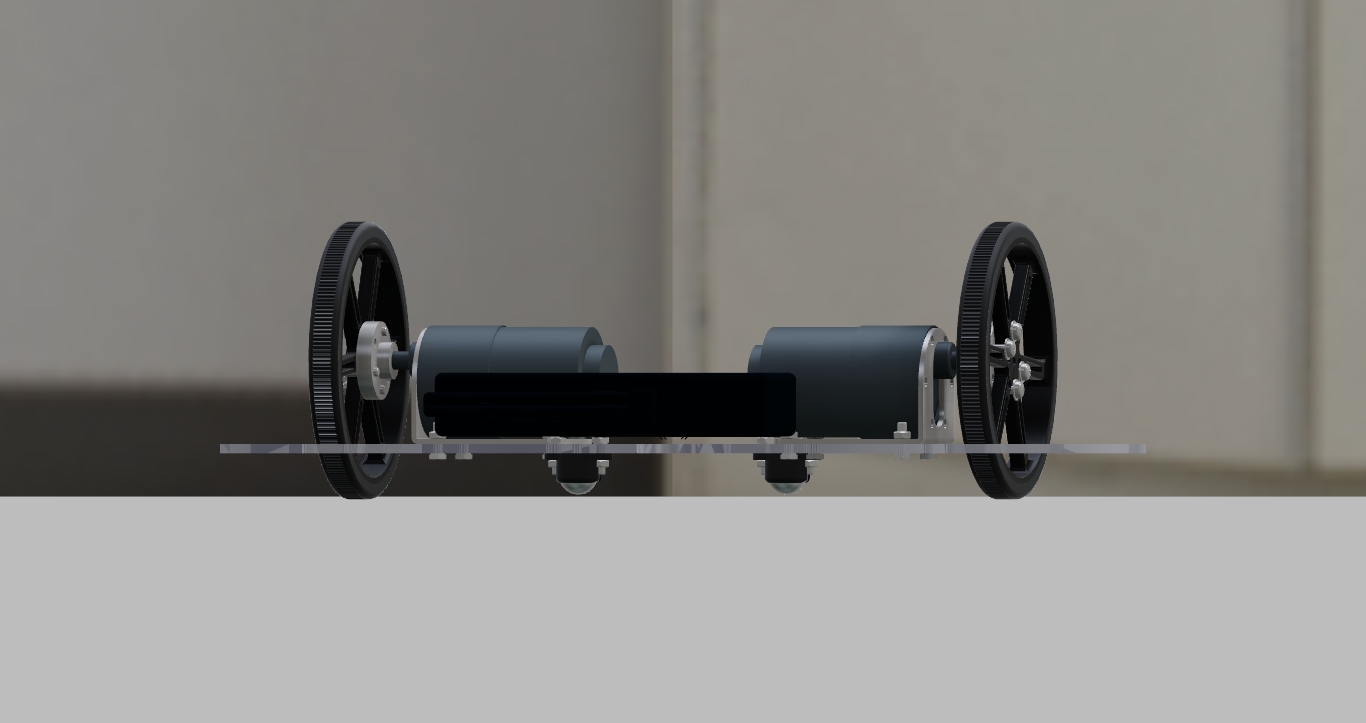
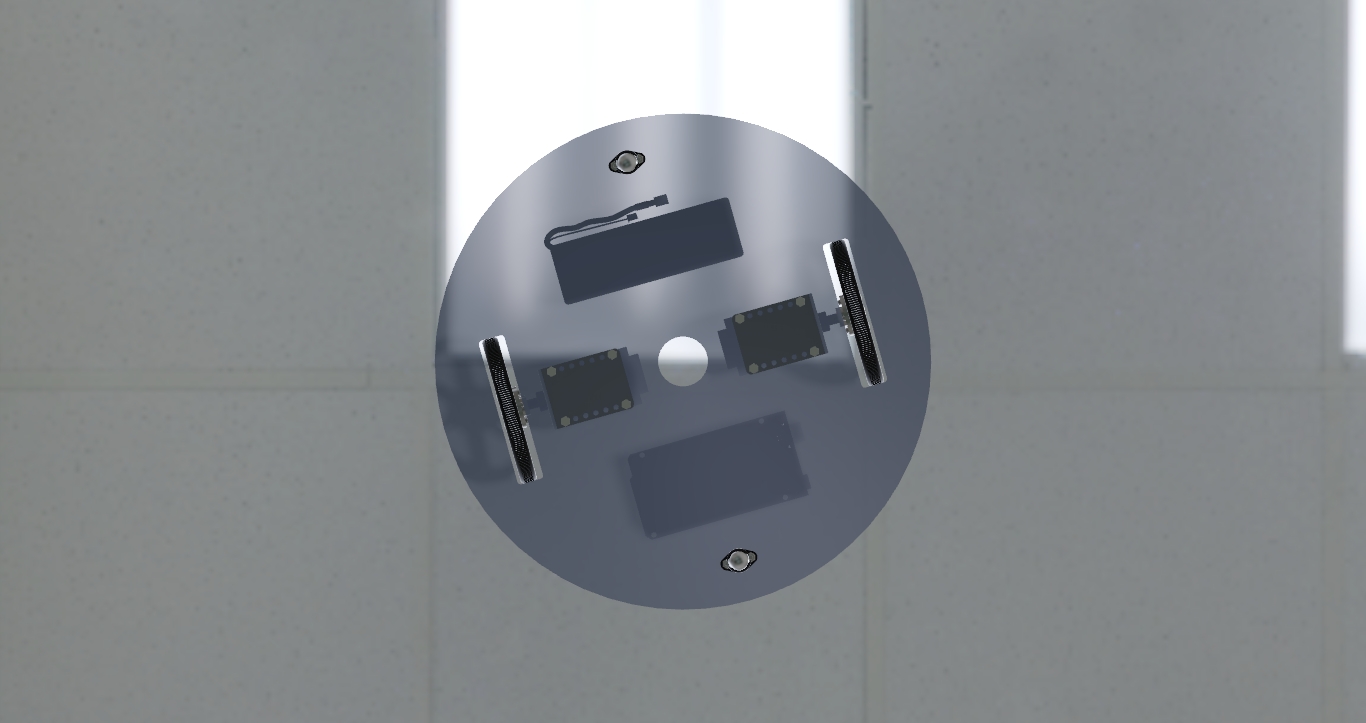
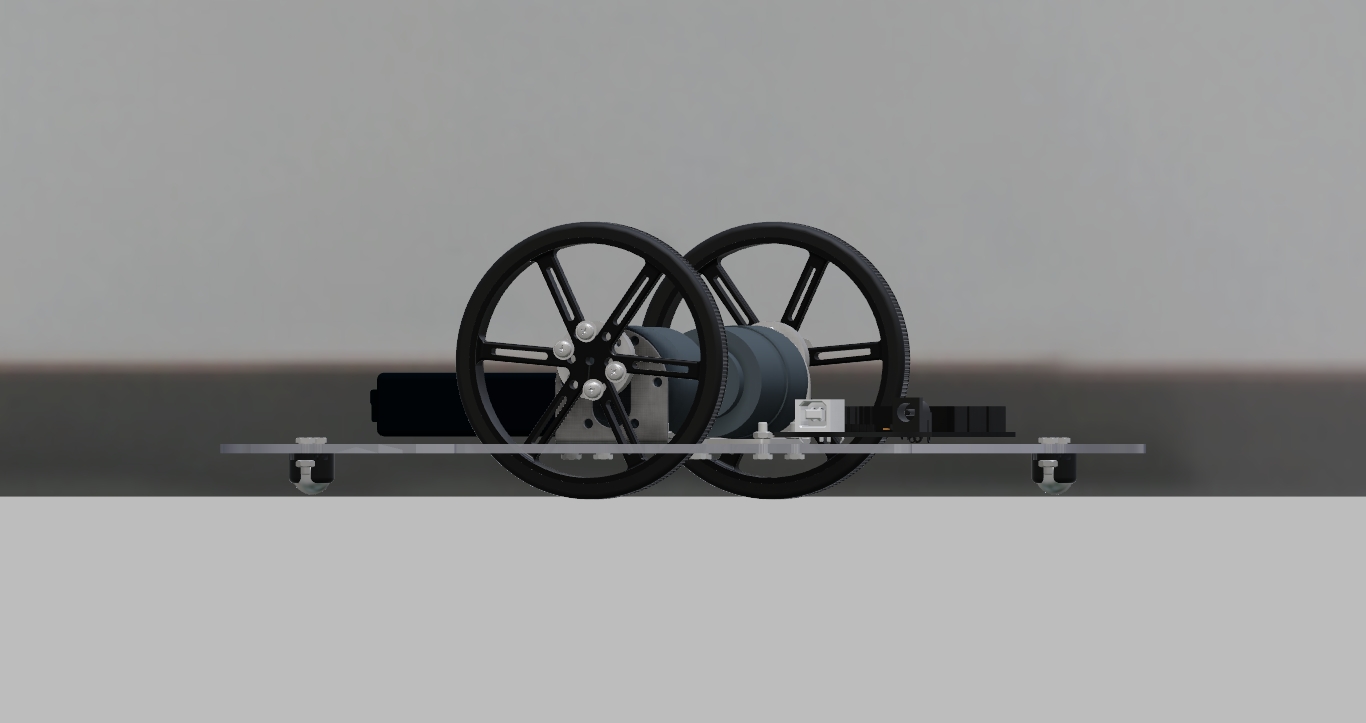
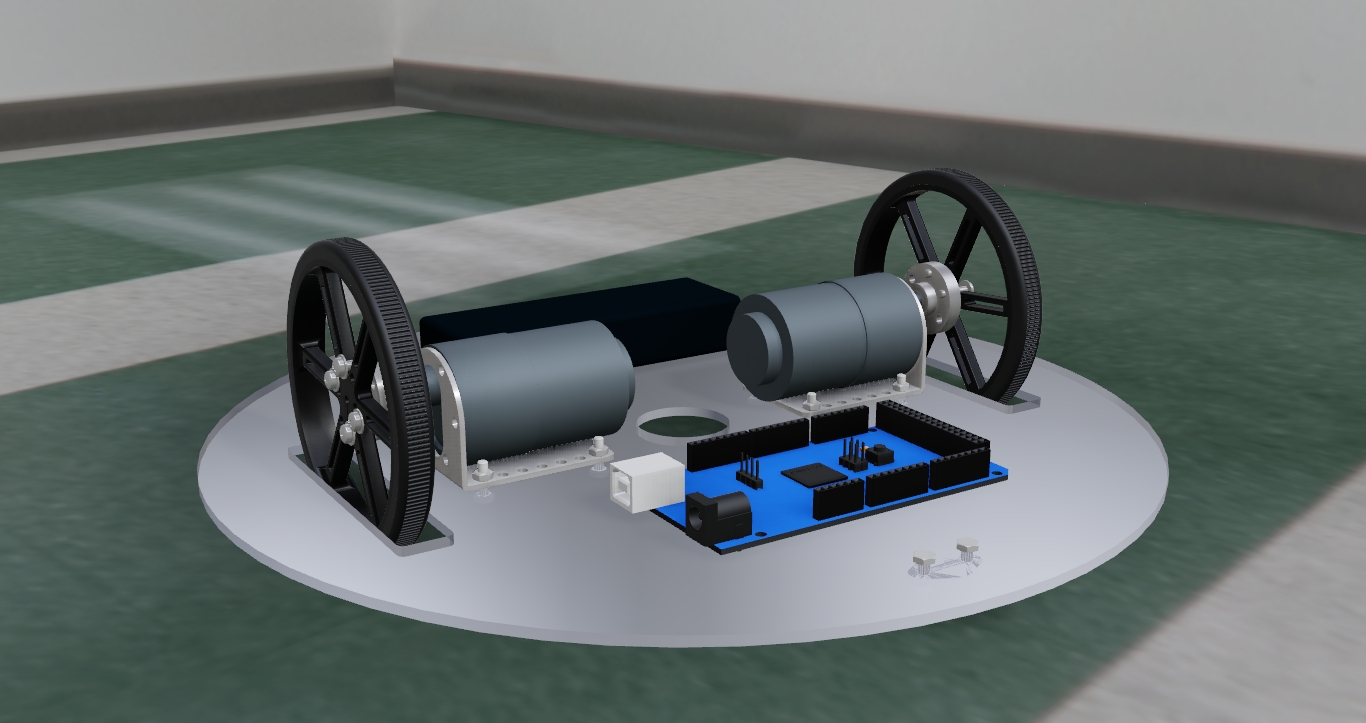
http://youtu.be/zANCWJQ6Qgo
Dites nous ce que vous en pensez!
On ira découper ça dès que les profs de prépa nous laisseront un peu de temps libre (c'est quand même une bonne heure pour aller au Faclab :/ ) d'ailleurs si on pouvait rencontrer des membres du forum là-bas ce serait marrant!
P-S: La partie "haute" du robot (capteurs montés sur des tiges filetées, deuxième cercle de pléxi avec un LCD, un bouton d'arrêt d'urgence et un écran LCD) est absente pour le moment parce qu'on en a pas encore besoin...
Image(s) jointe(s)
#48628 Do Droid by himself
Posté par
sur 09 septembre 2012 - 12:42
dans
Robots roulants, chars à chenilles et autres machines sur roues
#48527 une horloge murale digital sans afficheur ;)
Posté par
sur 06 septembre 2012 - 08:52
dans
Hack mod customisations et autres modifications
#48494 une horloge murale digital sans afficheur ;)
Posté par
sur 05 septembre 2012 - 09:56
dans
Hack mod customisations et autres modifications
)
#48467 cafard-robot: neuro-robotique sur un cafard
Posté par
sur 05 septembre 2012 - 02:08
dans
Cinéma, littérature, philosophie
http://www.youtube.c...player_embedded
(vu sur Semageek)
EDIT: décidément, entre ça, le cafard et le chadricoptère, jusqu'où ira-t-on dans le mépris de la vie animale ^^
#48283 A supprimé
Posté par
sur 30 août 2012 - 11:17
dans
Archives
Par contre pense à bien blinder ton dossier avec une video de présentation originale, une description complète de la fabrication, ce qui t'a donné l'idée etc.
Je pense que c'est très jouable!
ps: attention, ce concours est (malheureusement) limité aux mineurs... Plus de 18 ans c'est même pas la peine d'essayer
#48240 Une imprimante 3D
Posté par
sur 29 août 2012 - 11:50
dans
Impression 3D et Imprimantes 3D
C'est pas fini, et j'ai pas le compte exact, mais je dirai plus de 500;
Si c'était à refaire, je m'en tirerai peut-être pour 400.
Le plastique ensuite ça tourne à 30 le kg ttc fdp in, 26/27 en chine, mais pour un colis de cette taille... bonjour la douane.
ah ouais, quand même!
#48226 robot autonome
Posté par
sur 28 août 2012 - 08:08
dans
Robots roulants, chars à chenilles et autres machines sur roues
Alors, étant donné que vous utilisez une ChipKit Uno, vous n'allez malheuresement pas pouvoir utiliser la partie du code qui crée le timer de la même maniere que moi. Ce code est totalement spécifique au processeur de l'arduino méga (l'Atmega1280).
Dans le principe, j'utilise le timer1 qui va compter (à une fréquence assez élevée) et dés qu'il fait un overflow (qu'il est plein) il envoit une interruption. Cette interruption arrive donc tout le temps a interval régulier étant donné que le timer n'est pas logiciel mais matériel (donc que tu fasse des calculs sur l'arduino ou non, ca ne perturbe pas le timer). De plus, étant donné que c'est une interruption prioritaire, si ton arduino est en train de faire quelque chose, ca va le mettre en pause et faire en priorité ce qu'il y a dans la fonction d'interruption, donc ton code d'odométrie s'éxécutera toujours a interval réguliers et sera prioritaire sur tout le reste.
Il doit exister des choses équivalentes sur PIC, mais n'ayant jamais utilisé je ne peux pas t'aider plus ^^
oui je me doutais que c'était propriétaire aux Atmel :/
Merci pour l'explication, ça me servira pour la suite! Sinon pour le reste c'est pour économiser le processeur?
Je regarderai pour l'équivalent en PIC
EDIT: j'ai peut-être trouvé: http://chipkit.org/wiki/index.php?title=Core_Timer_Service_Overview mais j'avoue que j'ai pas encore lu
#48223 [Défi Robotique] Écrire "Robot"
Posté par
sur 28 août 2012 - 07:46
dans
Concours tournois et autres compétitions
#48222 Une imprimante 3D
Posté par
sur 28 août 2012 - 07:30
dans
Impression 3D et Imprimantes 3D
#48220 robot autonome
Posté par
sur 28 août 2012 - 07:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
pour moi ça sera un simple coca
No problem! en plus si tu viens habiter à Paris on aura ptet l'occasion de se voir!
t'as les résultats de tes concours au fait?
#48218 robot autonome
Posté par
sur 28 août 2012 - 06:52
dans
Robots roulants, chars à chenilles et autres machines sur roues
@JBot: si tu as le temps, tu pourras juste m'expliquer ton timer ISR(TIMER1_OVF_vect): tu dis que ça permet d'être très précis mais je ne comprends pas pourquoi tu met le sei() dedans, ni où tu as réglé la fréquence d'exécution du timer...
et aussi tes opérations sur l'oscillateur de la arduino, la raison pour laquelle tu affectes les entrées sorties manuellement, et pourquoi tu inclues des libs qui le sont déjà automatiquement!
Avec ça déjà je serai moins con XD
Je te payerai une bière sans faute le jour où on se rencontre IRL
#48214 robot autonome
Posté par
sur 28 août 2012 - 06:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
Aaaaaaaaaaaah ca marche merci beaucoup pour votre aide !!!!
Pour l'instant il est en java, mais on le mettra sur arduino en plus ce n'est pas un 8bit que l'on a mais un 32bit... Pour ceux qui veulent une vidéo c'est ici. Pfou voilà une bonne chose de faite... encore merci !!!!!
PS : @Hexa Emails, je me suis pris une ChipKit Uno32, elle à la même forme q'une aruino, le même code, le même prix , sauf qu'elle à 2X plus d'entrée/sortie, et un PIC 32bit. Par contre vu que c'est un PIC, certaines libraries arduino ne sont pas encore compatibles, et dans ce cas il faut la programmer par MPLAB.... on peut pas tout avoir
petit addendum:
La répartition des tâches d'odométrie/cartographie entre les µc se fera de la façon suivante:
La Arduino (chipkit) calcule x, y et Theta et l'envoie à mk802 en boucle, aussi vite qu'elle peut
Toutes les 50ms (@Hexa email: je vois pas trop comment faire juste avec millis() à part en faisant des conditions...) elle envoie la distance captée par un des capteurs us
La mk802 récupère ces valeurs et les renvoie via WiFi à un ordinateur disant sur lequel ce trouve une GUI en Java qui affiche une petite carte de la pièce et permet également à l'utilisateur de diriger le robot, soit en le dirigeant comme une voiture téléguidée, soit en cliquant sur un point de la carte pour que le robot y aille (comme dans les RPG sur ordi
). La partie "voiture télécommandée" est déjà fonctionnelle mais on a pas encore commencé la partie planification de trajectoire...Les ordres utilisateurs sont envoyées dans le sens inverse:
"voiture télécommandée": GUI-->mk802-->arduino
point de coordonnées: il faut encore qu'on décide comment on procède mais l'algo de planif se ferait dans l'ordinateur distant, il envoie la trajectoire (sous quelle forme??) à la mk802 qui la divise en "morceaux" de droite puis les envoie à la arduino pour qu'elle s'occupe de donner les ordres bas niveau (vitesses moteurs)
nous devons encore acheter une batterie (on va attendre un peu car c'est super cher!), 8 capteurs (on achète ça ce soir, 1.73 pièce on peut y aller), pour les ball-caster j'en ai une et on ira en acheter une autre à Lextronic et normalement ce sera bon pour le hardware
voilaaaa!
#48191 robot autonome
Posté par
sur 28 août 2012 - 12:09
dans
Robots roulants, chars à chenilles et autres machines sur roues
EDIT: C'est pas le diametre en fait, c'est l'entraxe ce par quoi on divise...
#48188 robot autonome
Posté par
sur 27 août 2012 - 10:21
dans
Robots roulants, chars à chenilles et autres machines sur roues
... approximation de sin(x) par x pour théta très petit? ... mais ça n'explique pas la soustraction, si?
ah ouais l'approximation de gauss... Donc on aurait sin(x)=left_mm-right_mm/2 = x? c'est ça? (je déteste la trigo! :@ )
#48186 robot autonome
Posté par
sur 27 août 2012 - 09:14
dans
Robots roulants, chars à chenilles et autres machines sur roues
regarde ici: si tu sais lire de l'anglais, c'est un post de jbot:
http://www.instructa...he-source-code/
sinon pour comprendre les calculs résonne en radiant:
pour les angles que fait chaque roue pour que le robot fasse pi rad:
gauche va par exemple faire pi et droite - pi
se qui fait (pi - (-pi)) /2=pi
pour la distance c'est plus simple tu fais l'avancement moyen des roue
Merci beaucoup! grâce au code de JBot j'ai presque tout compris (mais toujours pas l'histoire de (left_mm -right_mm)/D = theta en radian... Si quelqu'un a la demo mathématique et que c'est pas trop trop compliqué je suis preneur
)Merci à toi et a JBot s'il passe par là!
Et quelqu'un sait sinon pourquoi la méthode wikipedia ne fonctionne pas?
#48182 robot autonome
Posté par
sur 27 août 2012 - 08:11
dans
Robots roulants, chars à chenilles et autres machines sur roues
Heu, je trouve ça logique que ça en fonctionne pas entre ces 2 codes...
la partie arduino envoie par exemple8-7-0-0 8-7-0-0 6-7-0-0
et la partie java s'attend à recevoir87 87 67
et faites attention à discerner Serial.print et Serial.write... il y a un gros piège à ce niveau.
pour le code arduino les interruptions ne se font pas sur front montant mais sur changement non? (c'est juste un détail)
Le "SimpleTimer" ne sert à rien... à part rendre le truc plus compliqué et moins fiable.
Et dernière remarque: si vous pouviez enlever le capteur US de votre fonction "envoi", ce serait plus propre:
on ne sais jamais combien de temps une mesure au capteur US va "prendre le focus" (à moins que vous ayez fait des essais?)
Je surveille ça de près parce que ça ressemble à ce que l'on a fait l'an dernier pour la coupe, alors si on peut vous éviter de retomber dans les mêmes pieges...
[hs]bon je vais voir ce que donne la pièce en cours sur ma reprap
Quand tu parles du code Java, tu parles du pseudo code? parce que en ce qui concerne la réception des vitesses, j'ai complètement résumé mais François (c'est lui qui s'occupe de la partie Java) a normalement bien décodé le signal comme il faut (en plus pour la simulation il utilise des potentiomètres pour faire varier vG et vD (c'est d'ailleurs peut-être de là que viendrait le pb...))
Pour Serial.print et Serial.write, tu veux dire qu'il faudra dans le code Java convertir les char en int, c'est ça?
Pour les interruptions, il me semble que j'ai bien mis en mode CHANGE... EDIT ah ouais, c'est sur les commentaires que je me suis trompé!
je ne comprends pas ce que tu veux dire par "le simpletimer ne sert à rien": comment pourrait-on faire sans?
Pour le capteur us, c'est pareil: je ne vois pas comment on pourrait faire autrement: il faut 50ms pour "l'évaporation" du son entre 2 mesures (d'où le timer réglé sur 50ms) et pour la durée de "prise de focus", on la chronomètre grâce à temps1=millis() et temps2=millis().
Merci pour ton aide, je suis rassuré que tu nous surveille parce que c'est un gros projet, surtout si tu en as fait un équivalent
[hs] la classe d'avoir une reprap! [/hs]




