Ha !! L'humidité......Pareil ici , très humide sous les tropiques....Impossible d'utiliser les deux bobines....Une seule solution !! AU FOUR !! 50°.....Une heure.....Puis toujours dans un sac hermétique avec des sachets anti-humidité.............
Contenu de Telson
Il y a 969 élément(s) pour Telson (recherche limitée depuis 25-avril 13)
Par type de contenu
Voir pour ce membre
#92290 Les bobines de filament 3D bientôt en boutique !
 Posté par
sur 06 février 2018 - 08:20
dans
Les annonces Robot Maker
Posté par
sur 06 février 2018 - 08:20
dans
Les annonces Robot Maker
#92289 HumaOne
Posté par
sur 06 février 2018 - 08:15
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Hello Oliver,
Oui toujours présent, que très très rarement malheureusement...Trop, beaucoup trop de taf....C'est d'ailleurs un paramètre que je n'avais pas pris en compte : le temps que nous pouvons consacrer à son projet.
Je ne peux que constater que je n'ai pas le temps.....Je n'ai d'ailleurs même plus le temps de lire la presse.....Et franchement quand le week-end et là, je n'ai qu'une envie c'est de me reposer la tête.....Ce qui, si jamais les nouvelles perspectives se confirme ne risque pas d'arriver car je vais certainement prendre une activité encore plus chronophage.....
Cependant je viens de temps en temps prendre des nouvelles des projets du forum............
A+ et bonne continuation à tous....
nana.
#90133 Atlas Next Gen - Boston Dynamics
Posté par
sur 17 novembre 2017 - 08:51
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Nonnnnnnnnnnnnnnnn !!!!!!!!!!! Nonnnnnnnnnnnnnnnnnnnn!!!
Mais c'est carrément flippant même !! vous avez vue ces sauts !! Non là vraiment ils viennent de passer une très grosse étape là !!!
Punaise !! J'arrête pas de regarder cette vidéo c'est hallucinant!!!!!!!
#89733 Décisions morales prises par des machines
Posté par
sur 08 novembre 2017 - 09:59
dans
Intelligence artificielle
C'est très intéressant comme sujet....spécialement je préférerais pouvoir prendre la décision et sauver ma peau...et je laisserais les responsabilités aux concepteurs.
Très dur ce questionnaire...Je l'ais fait deux fois et deux fois de suite les choix sont plus que difficiles....Mais si j'étais à bord je préfère sauver ma peau.
Ce qui m'embête dans tout ça c'est que l'ont ne met pas trop en avant les systèmes de sécurité pour palier par exemple à un problème de frein. Dans les avions ils sont triplés....Dans les voitures ils devraient être au minimum doublés.
Il faudrait aussi que nos infrastructures évoluent aussi !! Voitures intelligentes !! Alors routes intelligentes : détection d'un piéton sur le passage, gestion des flux par caméra et capteur dans les routes, passage ferrés avec émission d'information, panneaux de limitation des vitesses intelligents. transmission des positions, vitesses, destination des voitures vers des mega-center.....
Les voitures évoluent alors l'environnement aussi doit le faire....sinon.....
#89691 Et si on faisait une imprimante 3D ?
Posté par
sur 07 novembre 2017 - 10:08
dans
Impression 3D et Imprimantes 3D
Très belle structure.....On attends la suite là !!! allez !! allez, Oracid !!! Allez !!!
#89653 HumaOne
Posté par
sur 05 novembre 2017 - 09:53
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je te remercie, Normalement nous devrions réussir à faire marcher ton bipède également comme ça, il n'y à pas de raison.
J'ai commencé la rédaction d'un tuto et j'espère qu'en mettant tous nos compétences nous pourrons développer quelque chose de vraiment génial.
Plus je regarde la vidéo et plus je suis persuadé qu'il nous est possible de faire mieux....Je trouve que les phases d'inclinaison gauche/droite pour passer le CM du bipéde d'un pied à l'autre est assez moche....Je n'aime pas non plus la phase d'extension des pieds : vers 1:10 lorsque le robot transfère le CM sur le pied gauche (inclinaison à gauche) on voit l'extension de la jambe gauche....C'est moche.....
Bref...Je pense qu'il faudrait partir sur une démarche avec genou fléchi pour plus de simplicité ....
La question que je me pose c'est en combien de temps le pied qui avance doit t'il effectuer son mouvement avant que le bipède chute...Comment calculer le temps max que doit consommer ce mouvement et comment synchroniser deux mouvements distinct....Je m'incline sur la droite et j'avance le pied gauche......
C'est @Léon qui avait fait quelque chose de bien sur ce sujet !!! @Léon?? !! Allooooo @Léon es tu là.......
A+ les makers
#89644 HumaOne
Posté par
sur 05 novembre 2017 - 04:53
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Une dernière vidéo pour plus de détails....C'est là que l'ont voit vraiment les améliorations à apporter........
#89618 Toulouse Robot Race 2017
Posté par
sur 04 novembre 2017 - 10:21
dans
TRR : Toulouse Robot Race
Carrément génial !! Bravo !
#89617 HumaOne
Posté par
sur 04 novembre 2017 - 08:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Pour le moment pas de test avec des pieds plus étroits et/ou déportés vers l'extérieur.
Je code, je teste, j'essaye......
Avant d'aller plus loin je vais aussi, comme promis, proposer un tuto sur la méthode de Denavit-Hartenbeg....Je pense que cela pourra aider plusieurs personnes et que nous pourrons, en unissant nos idées, développer des modèles plus sympas.....
@Léon aussi devrait participer car il avait fait quelque chose de vraiment sympas, la fluidité des mouvements de son robot était vraiment génial.....
A+ les Makers..........
#89614 HumaOne
Posté par
sur 04 novembre 2017 - 05:22
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Allez encore une petite vidéo mais cette fois sans les pauses :
On s'aperçoit qu'il y à des améliorations à faire mais c'est un début......
#89578 Patte de quadrupède
Posté par
sur 03 novembre 2017 - 07:33
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
L'animal est vivant.....c'est déjà ça. Bonne continuation.
#89550 HumaOne
Posté par
sur 02 novembre 2017 - 09:00
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est exactement ça ....Merci Mike.
J'utilise pour le moment des séquences pour le déplacement des jambes : inclinaison_droite, avant jambe_gauche de Xcm , inclinaison_gauche, avance_jambe droite de X cm.
J'utilise la méthode de Denavit-Hartenberg exclusivement pour calculer les positions des articulations........J'utilise ensuite l'origine d'un pied, sa destination et des vecteurs pour calculer les positions intermédiaires........
il faut maintenant que j'améliore les séquences. Je trouve que cela reste trop mécanique comme marche.....Ensuite j'aimerais bien remplacer certaines séquences par la gestion du déplacement du centre de masse..............Il me faudra par la suite implémenter une centrale inertielle et des capteurs sous les papattes....tout ça sous Marilou....bien sûr.....
Au final je suis surpris de trouver plus de plaisir à programmer que d’utiliser mon I3D.... Jusque quand??? ça je ne sais pas..............J’apprécie surtout le fait de ne plus avoir ces contraintes mécatroniques......
A+
#89542 HumaOne
Posté par
sur 01 novembre 2017 - 10:28
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Messieurs,
Je supprimerais les pauses prochainement quand j'aurai supprimé quelques imprécisions ......
D'ailleurs en parlant d'imprécision ce sont surtout au niveau des calculs, peut être les cos, sin, tan, asin, acos, atan, atan2.......J'ai quelques dérivé de 4/5 mm sur des calculs......c'est peut être pas beaucoup mais les calculs des angles sont impactés et dans le temps HO fini par se mélanger les pinceaux et chute......
Il faut aussi que je modifie les séquences cela ne me convient pas......
Pour rappel dans cette méthode il n'y à aucun angle prédéfini ils sont calculés en temps réel....
#89517 HumaOne
Posté par
sur 01 novembre 2017 - 07:14
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
allez petite vidéo....il reste encore du taf.....
Les mouvements sont saccadés car j'ai laissé en place énormément de pause me permettant de lire les résultats dans une fenêtre annexe....
#89301 HumaOne
Posté par
sur 26 octobre 2017 - 07:14
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
hé yaaaaaaaaaa........
Enfin !!! Enfin.......Après de très long mois à me faire cuire la tête c'est un grand pas que je viens de franchir !!!
J'ai le plaisir de vous annoncer que HumaOne marche...Bon il se met encore un peu les pieds dans le tapis mais il marche !!!!
Je vous entends d'ici !!! Une vidéo !! Une vidéo !!! Oui mais avec Marilou quand j'enregistre la marche de HO ce sont des fichiers de 500 Mo.....Faut que je regarde ça aussi......Heu si quelqu'un à une idée je suis preneur.......
A+
#89300 Robot Bipède Amhnemus
Posté par
sur 26 octobre 2017 - 07:02
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...

#89298 Robot Bipède Amhnemus
Posté par
sur 26 octobre 2017 - 06:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je confirme qu'il est impératif de commencer par le papier.
il faut écrire les fonctions, les boucles et en profiter pour penser les variables.....Dans le même temps prévoir des fonctions pour afficher les résultats des calculs afin de pouvoir vérifier que le programme fait bien ce qu'on lui demande.....
++
#88661 Projet robot
Posté par
sur 12 octobre 2017 - 01:19
dans
Conseils et aide aux débutants, livres et kits en robotique
Ce sont surtout les servo officielles de TowerPro....Comme je le disais ce n'est pas l'origine de la fabrication mais le cahier des charges du concepteur qui défini la qualité contrairement aux contres-façon qui elles n'ont pas de cahier des charges autre que la marge la plus élevée possible ....
#88633 Glenn Robot Humanoide
Posté par
sur 11 octobre 2017 - 10:13
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Lance toi, pratique et tu reviendras sur les cours pour des compléments d'informations...GO !!!
#88628 Lego CAO - Stud.io
Posté par
sur 11 octobre 2017 - 09:15
dans
Lego
Merci Oracid!
#88627 Glenn Robot Humanoide
Posté par
sur 11 octobre 2017 - 09:01
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Excuse moi @Olivier mais qu'est ce que tu apprends en C++ pendant 2/3 heures.....Est tu sûr de devoir apprendre autant de chose que ça? au départ si tu connais les boucles if, else if, fo et while plus l'appel de fonction c'est bon tu as assez............Tu fais une thèse en C++ ou quoi?
++
#88538 Projet robot
Posté par
sur 09 octobre 2017 - 07:50
dans
Conseils et aide aux débutants, livres et kits en robotique
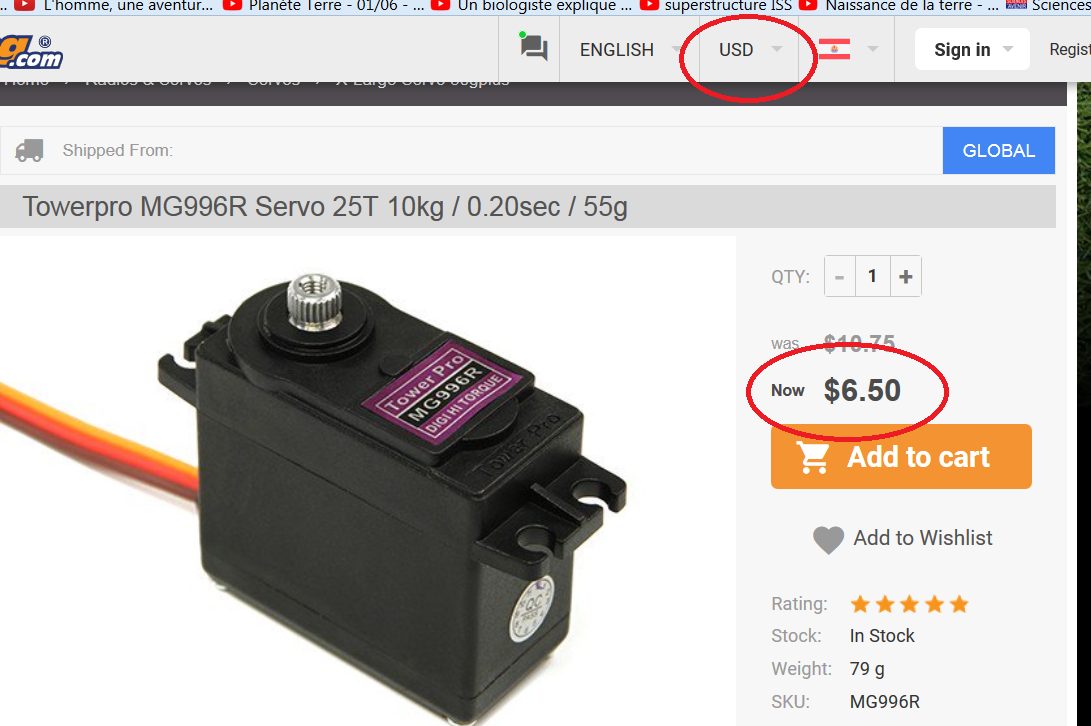
L'origine de la fabrication n'est pas toujours l'origine du problème .....La contre façon à bas prix est le problème !!!
Version officielle à 6.5 $ !!!
https://hobbyking.co...-20sec-55g.html
La marque TowerPro sur le boitier et non pas TowarPro et surtout la petite pastille test sur le boitier.
#88536 Projet robot
Posté par
sur 09 octobre 2017 - 06:21
dans
Conseils et aide aux débutants, livres et kits en robotique
Stop aux chinoiseries ..Allez les acheter chez le fabriquant ou fournisseurs agrées.....Pas beaucoup plus chers et tellement mieux.....Je parle en connaissance de cause!
#88531 logiciel modélisation robot anykode
Posté par
sur 08 octobre 2017 - 10:01
dans
Logiciels
Et ben !! Je vois qu'ici comme sur la toile la question des variables globales fait débat....
@R1D1, je te remercie pour le code. C'est vraiment génial et je vais creuser l'histoire du container. La partie logique de commande est vraiment très intéressant aussi :
all_servos.at(i)->SetEffectiveMaxVelocityDPS(Speed[i]); all_servos.at(i)->GoPositionDeg(NewAngle[i])
La possibilité d'utiliser non plus des nom complexe (pServoPivot_D, ....) mais une variable i, va aussi me faciliter les choses....
GROS bisous à toi aussi alors hein !!! Sur la bouche ?
A+
#88474 Tête en ballons - servos - record des mouvements
Posté par
sur 08 octobre 2017 - 12:17
dans
Autres projets inclassables
Tous les tutos sont bon à prendre. Merci.




