Bonjour.
Pas mal ton robot humanoïde, quelle est sa taille ???
Quelle alimentation utilise tu ???
Une petite vidéo pour voir une petite démonstration de ton robot c'est possible ???
Il y a 1000 élément(s) pour seb03000 (recherche limitée depuis 01-mai 13)
 Posté par
sur 23 août 2016 - 09:36
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 23 août 2016 - 09:36
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour.
Pas mal ton robot humanoïde, quelle est sa taille ???
Quelle alimentation utilise tu ???
Une petite vidéo pour voir une petite démonstration de ton robot c'est possible ???
Posté par
sur 22 août 2016 - 11:31
dans
Programmation
Alors je viens de faire mon programme il fonctionne bien, mais j'ai l’impression qu'il y a des raté au niveau du capteur US , ya t'il moyen d'amélioré cela.
Voici mon programme:
#include <Servo.h>
// Définition des broches utilisées par le capteur HC-SR04
int trig = 13;
int echo = 12;
//Les LED
int LEDYeux = 2; // Broche pour la LED les yeux
int LEDLaserRouge = 3; // Broche pour LED Laser ( prévient quant ya un obstacle )
int LEDBleu = 4; // Broche pour LED Bleu ( prévient quand ya pas d'obstacle )
// définition des broches utilisées sur le shield contrôle moteur DRI0001
int direction_moteur_droite = 7;
int controle_moteur_droite = 6;
int direction_moteur_gauche = 4;
int controle_moteur_gauche = 5;
long lecture_echo;
long cm, cm_gauche, cm_droite;
// crée l’objet pour contrôler le servomoteur
Servo monservo;
//=========================================================================================================//
void moteur (int moteur_gauche, boolean sens_moteur_gauche, int moteur_droite, boolean sens_moteur_droite)
{
// définition sens moteur LOW avance, HIGH recule
digitalWrite(direction_moteur_gauche, sens_moteur_gauche);
analogWrite(controle_moteur_gauche, moteur_gauche);
digitalWrite(direction_moteur_droite, sens_moteur_droite);
analogWrite(controle_moteur_droite, moteur_droite);
}
void virage_90 (boolean sens)
{
// Garder la valeur PWM à 255
// Jouer sur la durée en ms pour effectuer un virage souhaité
// sens à HIGH pour gauche, LOW pour droite
digitalWrite(direction_moteur_gauche, sens);
digitalWrite(direction_moteur_droite, !sens);
analogWrite(controle_moteur_gauche, 255);
analogWrite(controle_moteur_droite, 255);
delay(480);
analogWrite(controle_moteur_gauche, 0);
analogWrite(controle_moteur_droite, 0);
}
void calcul_distance()
{
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
lecture_echo = pulseIn(echo, HIGH);
cm = lecture_echo / 58;
}
void setup()
{
pinMode(LEDYeux, OUTPUT);
pinMode(LEDBleu, OUTPUT);
pinMode(LEDLaserRouge, OUTPUT);
int i;
for (i=4;i<=7;i++)
pinMode(i, OUTPUT); //définit les port 4 à 7 en sortie
analogWrite(controle_moteur_gauche, 0); // arrêt moteur gauche
analogWrite(controle_moteur_droite, 0); // arrêt moteur droite
pinMode(trig, OUTPUT);
digitalWrite(trig, LOW);
pinMode(echo, INPUT);
monservo.attach(9); // utilise la broche 9 pour le contrôle du servomoteur
monservo.write(70); // positionne le servomoteur en fait à 90°
}
void loop()
{
digitalWrite(LEDYeux, HIGH);
digitalWrite(LEDBleu,HIGH); //LED Bleu éclairé quand pas d'obstacle
digitalWrite(LEDLaserRouge,LOW); // LED Laser rouge éclaire quand ya un obstacle
monservo.write(70);
delay(1000);
calcul_distance();
if (cm >= 90)
{
// Robot avance tout droit
moteur(255, LOW, 255, LOW);
}
else
{
digitalWrite(LEDBleu,LOW);
digitalWrite(LEDLaserRouge,HIGH);
// Robot stop
moteur(0, LOW, 0, LOW);
monservo.write(30);
delay(1000);
calcul_distance();
cm_droite = cm;
monservo.write(120);
delay(1000);
calcul_distance();
cm_gauche = cm;
if (cm_droite < cm_gauche)
{
// Robot tourne 90° à gauche
virage_90(HIGH);
}
if (cm_droite > cm_gauche)
{
// Robot tourne 90° à droite
virage_90(LOW);
}
if (cm_droite == cm_gauche)
{
// Robot demi-tour
virage_90(HIGH);
virage_90(HIGH);
}
}
}
A oui j'ai trouvais la librairie en question que me fessai défaut.
Si vous avez des idée sur l'amélioration du capteur cela serrer sympas.
Je vais creuser de mon coter , est aussi finaliser le codage des moteurs de chaque bras de wall-e que je n'est pas mis au poins.
Posté par
sur 22 août 2016 - 02:15
dans
Programmation
Merci Jekert
A cette librairie je les en faite.
Bon celle que je souhaite avoir , pour quelle fonctionne c'est celle si.
Se programme je les pris sur un des sites pour le testé , le souci c'est que j’obtiens une erreur, suite a une librairie manquante je pense.
Voici le code en question:
#include « Ultrasonic.h » //lib capteur HSR04
#include <Servo.h> //lib servo moteur
const int Trig = 7; //declaration pin carte arduino mega
const int Echo = 6; //declaration pin carte arduino mega
long cm; //variable HCSR04
long cm1; //variable HCSR04
long cm2; //variable HCSR04
Ultrasonic HCSR04(Trig,Echo); //appel des fonctions
int motor1Pin1 = 8; // MOTEUR GAUCHE
int motor1Pin2 = 9; // MOTEUR GAUCHE
int enablePin1 = 2; // COMMANDE GAUCHE
int motor2Pin4 = 10; // MOTEUR DROIT
int motor2Pin3 = 11; // MOTEUR DROIT
int enablePin2 = 3; // COMMANDE DROITE
Servo servoexplo; //nom servo
void setup() {
Serial.begin(9600); //monitoring
// déclaration des sorties
pinMode(motor1Pin1, OUTPUT); //declaration en sortie
pinMode(motor1Pin2, OUTPUT); //declaration en sortie
pinMode(enablePin1, OUTPUT); //declaration en sortie
pinMode(motor2Pin4, OUTPUT); //declaration en sortie
pinMode(motor2Pin3, OUTPUT); //declaration en sortie
pinMode(enablePin2, OUTPUT); //declaration en sortie
servoexplo.attach(5); //declaration en sortie
// Mettre la broche Enable a high comme ca les moteurs tournent
digitalWrite(enablePin1, HIGH); //moteur en route
digitalWrite(enablePin2, HIGH); //moteur en route
}
void loop() {
Serial.println(cm); //affichage sur le monitoring
servoexplo.write(30); //angle du servo
cm2 = HCSR04.convert(HCSR04.timing(), 1); //calcul de la distance par la fonction
delay(400); // pause d’acquisition
if (cm < 20) {
digitalWrite(motor1Pin1, LOW); // ARRIERE TOUTE
digitalWrite(motor1Pin2, HIGH); //
digitalWrite(motor2Pin4, HIGH); //
digitalWrite(motor2Pin3, LOW); //
delay (800); //pause de mouvement
digitalWrite(motor1Pin1, HIGH); // DROITE TOUTE
digitalWrite(motor1Pin2, LOW); //
digitalWrite(motor2Pin4, HIGH); //
digitalWrite(motor2Pin3, LOW); //
delay (800); //pause de mouvement
}
else {
// Le moteur gauche AVANT
digitalWrite(motor1Pin1, HIGH); // AVANT TOUTE
digitalWrite(motor1Pin2, LOW); //
// Le moteur droit AVANT
digitalWrite(motor2Pin4, LOW); //
digitalWrite(motor2Pin3, HIGH); //
}
servoexplo.write(90);
cm1 = HCSR04.convert(HCSR04.timing(), 1);
delay(400); // pause d’acquisition
if (cm1 < 20) {
digitalWrite(motor1Pin1, LOW); // GAUCHE TOUTE
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin4, LOW); //
digitalWrite(motor2Pin3, HIGH); //
delay (800); //pause de mouvement
}
else {
// Le moteur gauche AVANT
digitalWrite(motor1Pin1, HIGH); // AVANT TOUTE
digitalWrite(motor1Pin2, LOW); //
// Le moteur droit AVANT
digitalWrite(motor2Pin4, LOW); //
digitalWrite(motor2Pin3, HIGH); //
}
servoexplo.write(140);
cm = HCSR04.convert(HCSR04.timing(), 1);
delay(400); // pause d’acquisition
if (cm2 < 20) {
digitalWrite(motor1Pin1, HIGH); // DROITE TOUTE
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin4, HIGH); //
digitalWrite(motor2Pin3, LOW); //
delay (800); //pause de mouvement
}
else {
// Le moteur gauche AVANT
digitalWrite(motor1Pin1, HIGH); // AVANT TOUTE
digitalWrite(motor1Pin2, LOW); //
// Le moteur droit AVANT
digitalWrite(motor2Pin4, LOW); //
digitalWrite(motor2Pin3, HIGH); //
}
}
Et voici le message d'erreur:
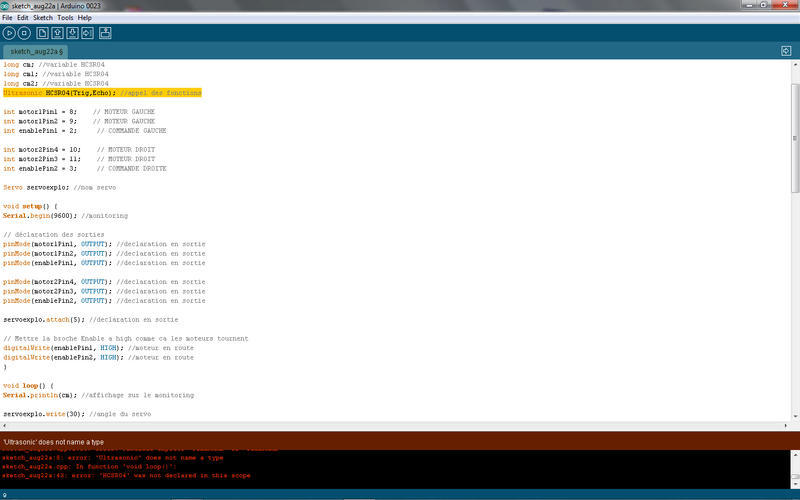
Le bute de cela, c'est de ne pas prendre son code juste voir comment cela fonctionne , points de vue de sa déclaration de son capteur,
est celle la me plais bien, du comme vous avez pus le voir se programme me bloque a causse d'une erreur sans doute banale.
Posté par
sur 22 août 2016 - 12:51
dans
Programmation
Bonjour a tous.
Sa fait un moment que je ne suis pas passer ici , est sa a bien changer.
Bon voilà mon problème , je suis actuellement en train de faire un recyclage sur un robot wall-e.
Je lui est installer une carte roméo , plus 2 servo-moteurs , est 3 servo ( 2 pour les bras , 1 pour le coup ).
Comme capteur, un capteur ultrasons ( US ) celui si --> 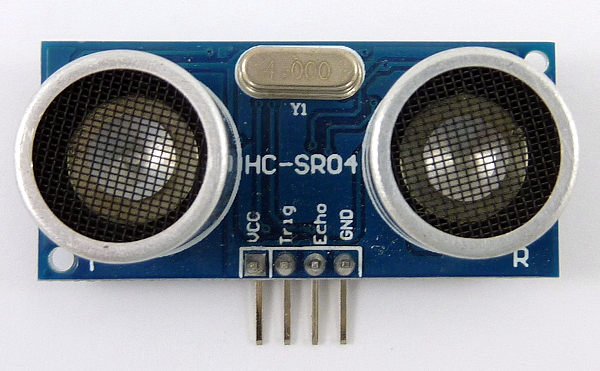
Est 2 LED, donc une LED bleu basique, est un petit laser rouge , le laser indique qu'il y a un obstacle devant lui grâce au capteur us,
est la LED bleu indique qui ya pas d'obstacle.
Mon souci c'est que je ne trouve pas la librairie pour se capteur , pouvez vous m'aidez ???
Merci a tous
Posté par
sur 13 avril 2014 - 06:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour Leon.
Impressionnant, ton projet bipède chapeaux.
Pour se qui concerne les pieds en forme cylindriques , pour quoi ne pas les faire plus large afin qu'il puise tenir ferment le sole??
En tous cas je suivrai ta progression de ton bipède.
Allez courage , et ne l'ache rien.
Posté par
sur 10 avril 2014 - 11:25
dans
Programmation
C'est pour illustré l'utilisation d'une instruction switch ,et du commutateur il
pourra me déclaré et me permettre de choisir parmi un ensemble de valeurs de caractère grâce aux bouton du LCD
C'est comme une série d'instructions if.
Posté par
sur 07 avril 2014 - 10:51
dans
Programmation
Bigot je viens de télécharger L' IDE Arduino 1.0.5 et j'ai quand même fait le teste en laissent le câble d'alimentation USB, est cela fonctionne merci de ton aide
ChristianR sa fait plus 1 semaine que je galéré sur cela.
Encore merci toi.
Posté par
sur 07 avril 2014 - 10:11
dans
Programmation
ChristianR
ok merci je vais testé sa.
Je vais mettre une batterie de 8.4V 1100mAh , mais elle et a plat , je vais la recharger , et je vous tien informé.
Merci ChristianR
Posté par
sur 07 avril 2014 - 09:46
dans
Programmation
Posté par
sur 07 avril 2014 - 05:55
dans
Programmation
Posté par
sur 07 avril 2014 - 09:38
dans
Programmation
/*--------------------------------------------------------------------------------------
Includes
--------------------------------------------------------------------------------------*/
#include <LiquidCrystal.h>
/*--------------------------------------------------------------------------------------
Defines
--------------------------------------------------------------------------------------*/
// Pins utilisé
#define BUTTON_ADC_PIN A0 // A0 est l'entrée bouton ADC
#define LCD_BACKLIGHT_PIN 3 // D3 contrôle LCD rétro backlight
// Lectures ADC attendus pour les 5 boutons sur l'entrée ADC
#define RIGHT_10BIT_ADC 0 // droit
#define UP_10BIT_ADC 145 // jusqu'à
#define DOWN_10BIT_ADC 329 // vers le bas
#define LEFT_10BIT_ADC 505 // gauche
#define SELECT_10BIT_ADC 741 // droit
#define BUTTONHYSTERESIS 10 // fenêtre bouton de détection valide
//renvoyer des valeurs pour ReadButtons()
#define BUTTON_NONE 0 //
#define BUTTON_RIGHT 1 //
#define BUTTON_UP 2 //
#define BUTTON_DOWN 3 //
#define BUTTON_LEFT 4 //
#define BUTTON_SELECT 5 //
// Define our states
#define STATE_TITLE 00 // Un écran de titre
#define STATE_KEYWAIT 05 // En attente d'une pression de touche
#define STATE_GAMESTART 20 // Le jeu commence
#define STATE_TURNSTART 30
#define STATE_INPUTNUMBER 40
// Misc. Defines
#define MSGFLASHDELAY 1000 // Combien de temps à clignoter messages pour (ms)?
/*--------------------------------------------------------------------------------------
Variables
--------------------------------------------------------------------------------------*/
byte buttonJustPressed = false; //ce sera vrai après ReadButtons () appeler si elle est déclenchée
byte buttonJustReleased = false; //ce sera vrai après ReadButtons () appeler si elle est déclenchée
byte buttonWas = BUTTON_NONE; //utilisée par ReadButtons () pour la détection d'événements de bouton
// Configuration des variables qui seront utilisées
byte state, nextstate;
byte timer, inputpos, flash;
boolean update;
byte bombpos[6], pos[6], signal[6];
byte ipos[6] = {4,5, 11,12, 14,15 };
int tmp;
unsigned long flashtime;
/*--------------------------------------------------------------------------------------
Init la bibliothèque LCD avec les broches LCD à utiliser
--------------------------------------------------------------------------------------*/
LiquidCrystal lcd(8, 9, 4, 5, 6, 7); //Pins pour le bouclier freetronics 16x2 LCD. LCD: ( RS, E, LCD-D4, LCD-D5, LCD-D6, LCD-D7 )
/*--------------------------------------------------------------------------------------
setup()
Appelé par l'infrastructure 1 fois, avant le début de la boucle principale
--------------------------------------------------------------------------------------*/
void setup() {
// Setup pins.
pinMode(BUTTON_ADC_PIN, INPUT ); // Entrée analogique pour les boutons de l'écran LCD
digitalWrite(BUTTON_ADC_PIN, LOW );
pinMode(LCD_BACKLIGHT_PIN, OUTPUT ); // contrôle du rétroéclairage (off/on)
digitalWrite(LCD_BACKLIGHT_PIN, HIGH ); // Tournez le rétro-éclairage on
randomSeed(analogRead(1)); // Envoyer le générateur de nombres aléatoires
lcd.begin( 16, 2 ); //bibliothèque LCD affichage 16x2
lcd.setCursor( 0, 0 );
// 1234567890123456
lcd.print( "-_D E F U S E _-" );
lcd.setCursor( 0, 1 );
lcd.print( '.' );
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
lcd.print( '.' );
flashbacklight();
state = STATE_TITLE;
}
/*--------------------------------------------------------------------------------------
loop()
Arduino main loop
--------------------------------------------------------------------------------------*/
void loop() {
byte button;
button = ReadButtons();
switch(state) { // Faire des choses différentes en fonction de "l'état"
case STATE_TITLE:
lcd.setCursor( 0, 0 );
// 1234567890123456
lcd.print( "= D E F U S E =");
lcd.setCursor( 0, 1 );
lcd.print( "Press[touche]key" );
nextstate = STATE_GAMESTART;
state = STATE_KEYWAIT;
break;
case STATE_KEYWAIT:
if(buttonJustPressed) state = nextstate;
break;
case STATE_GAMESTART:
//Init afin de signal
for(int i = 0; i < 6; i++) signal[i] = i;
//Afin de signal aléatoire
for(int cnt = 0; cnt < 500; cnt++) {
int pos1 = random(6);
int pos2 = random(6);
tmp = signal[pos1];
signal[pos1] = signal[pos2];
signal[pos2] = tmp;
}
//Choisissez une position à la bombe. Il ne peut être 00,00,00
do {
tmp = 0;
for(int i = 0; i < 6; i++) {
pos[i] = 0;
bombpos[i] = random(9);
tmp += bombpos[i];
}
}
while(tmp == 0);
timer = 300;
lcd.clear();
// 1234567890123456
lcd.print("Trouver la bombe");
lcd.setCursor(0,1);
lcd.print("il y a des");
delay(MSGFLASHDELAY);
lcd.setCursor(0,0);
lcd.print("detecteur,Il ya ");
lcd.setCursor(0,1);
lcd.print("1 million piece ");
delay(MSGFLASHDELAY);
lcd.setCursor(0,0);
lcd.print("Alors comment ");
lcd.setCursor(0,1);
lcd.print("Sa marche? ");
delay(MSGFLASHDELAY);
state = STATE_TURNSTART;
//tombe à travers
case STATE_TURNSTART:
// 1234567890123456
// SSSSSSsig t:TTT
// Flr:YY Rm:XX.ZZ
if(timer == 0) {
flashbacklight();
lcd.setCursor(0,0);
lcd.print("B O O O O O O ");
lcd.setCursor(0,1);
lcd.print(" O O O O O OM!");
delay(MSGFLASHDELAY);
lcd.clear();
lcd.print("Les bombes etait");
lcd.setCursor(0,1);
lcd.print("Flr:");
lcd.print(bombpos[0]);
lcd.print(bombpos[1]);
lcd.print("Rm:");
lcd.print(bombpos[2]);
lcd.print(bombpos[3]);
lcd.print(".");
lcd.print(bombpos[4]);
lcd.print(bombpos[5]);
nextstate = STATE_TITLE;
state = STATE_KEYWAIT;
break;
}
timer -= 10;
lcd.clear();
for(int i = 0; i < 6; i++) {
lcd.print(9 - abs((int)bombpos[signal[i]] - (int)pos[signal[i]]));
}
lcd.print(" sig t: ");
if(timer<100) lcd.print("0");
lcd.print(timer);
lcd.setCursor(0,1);
lcd.print("Flr:YY Rm:XX.ZZ ");
for(int i = 0; i < 6; i++) {
lcd.setCursor(ipos[i],2);
lcd.print(pos[i]);
}
inputpos = 0;
flashtime = millis() + 750;
flash = 1;
state = STATE_INPUTNUMBER;
//tombe à travers
case STATE_INPUTNUMBER:
update = false;
if(millis() >= flashtime) {
flashtime = millis() + (750 - (500 * flash));
flash = 1 - flash;
update = true;
}
if(buttonJustPressed) {
switch(button) {
case BUTTON_LEFT:
lcd.setCursor(ipos[inputpos],1);
lcd.print(pos[inputpos]);
if(inputpos == 0) inputpos = 5;
else inputpos--;
update = true;
break;
case BUTTON_RIGHT:
lcd.setCursor(ipos[inputpos],1);
lcd.print(pos[inputpos]);
if(inputpos == 5) inputpos = 0;
else inputpos++;
update = true;
break;
case BUTTON_DOWN:
if(pos[inputpos] == 0) pos[inputpos] = 9;
else pos[inputpos]--;
update = true;
break;
case BUTTON_UP:
if(pos[inputpos] == 9) pos[inputpos] = 0;
else pos[inputpos]++;
update = true;
break;
case BUTTON_SELECT:
lcd.clear();
if(bombpos[0] == pos[0] && bombpos[1] == pos[1] && bombpos[2] == pos[2] &&
bombpos[3] == pos[3] && bombpos[4] == pos[4] && bombpos[5] == pos[5]) {
// 1234567890123456
lcd.print("Bombe desactive"); lcd.setCursor(0,1);
lcd.print("Vous etes un heros!");
nextstate = STATE_TITLE;
state = STATE_KEYWAIT;
} else {
lcd.print("Numerisation");
delay(MSGFLASHDELAY/2);
lcd.print(".");
delay(MSGFLASHDELAY/3);
lcd.print(".");
delay(MSGFLASHDELAY/4);
lcd.print(".");
delay(MSGFLASHDELAY/5);
lcd.print(".");
delay(MSGFLASHDELAY/6);
state = STATE_TURNSTART;
}
update = false;
break;
}
}
if(update == true) {
lcd.setCursor(ipos[inputpos],1);
if(flash == 0) lcd.print("_");
else lcd.print(pos[inputpos]);
}
break;
default:
break;
}
//effacer les drapeaux buttonJustPressed & buttonJustReleased; ils ont déjà fait leur travail
if(buttonJustPressed) buttonJustPressed = false;
if(buttonJustReleased) buttonJustReleased = false;
delay(25); //Retard pour arrêter les boutons "sautillement" faux presses. Pas aussi bien comme un véritable anti-rebond.
}
void flashbacklight() {
digitalWrite(LCD_BACKLIGHT_PIN, LOW);
delay(150);
digitalWrite(LCD_BACKLIGHT_PIN, HIGH);
delay(150);
}
/*--------------------------------------------------------------------------------------
ReadButtons()
Détecter le bouton enfoncé et retourner la valeur
Utilise les valeurs mondiales buttonWas, buttonJustPressed, buttonJustReleased.
--------------------------------------------------------------------------------------*/
byte ReadButtons() {
unsigned int buttonVoltage;
byte button = BUTTON_NONE; // retourner aucun bouton pressé si les contrôles ci-dessous n'écrivent pas btn
//lire la tension de la broche bouton ADC
buttonVoltage = analogRead( BUTTON_ADC_PIN );
//sens que si la tension tombe dans les fenêtres de tension valides
if( buttonVoltage < ( RIGHT_10BIT_ADC + BUTTONHYSTERESIS ) )
{
button = BUTTON_RIGHT;
}
else if( buttonVoltage >= ( UP_10BIT_ADC - BUTTONHYSTERESIS )
&& buttonVoltage <= ( UP_10BIT_ADC + BUTTONHYSTERESIS ) )
{
button = BUTTON_UP;
}
else if( buttonVoltage >= ( DOWN_10BIT_ADC - BUTTONHYSTERESIS )
&& buttonVoltage <= ( DOWN_10BIT_ADC + BUTTONHYSTERESIS ) )
{
button = BUTTON_DOWN;
}
else if( buttonVoltage >= ( LEFT_10BIT_ADC - BUTTONHYSTERESIS )
&& buttonVoltage <= ( LEFT_10BIT_ADC + BUTTONHYSTERESIS ) )
{
button = BUTTON_LEFT;
}
else if( buttonVoltage >= ( SELECT_10BIT_ADC - BUTTONHYSTERESIS )
&& buttonVoltage <= ( SELECT_10BIT_ADC + BUTTONHYSTERESIS ) )
{
button = BUTTON_SELECT;
}
//gérer drapeaux touche des événements juste pressés et vient de sortir
if( ( buttonWas == BUTTON_NONE ) && ( button != BUTTON_NONE ) )
{
//le bouton a été pressé, mettre buttonJustPressed, ce qui peut éventuellement être utilisé pour déclencher une action ponctuel pour appuyer sur un bouton veille
//il est du devoir du récepteur pour effacer ces drapeaux si elle veut détecter un nouvel événement de changement de bouton
buttonJustPressed = true;
buttonJustReleased = false;
}
if( ( buttonWas != BUTTON_NONE ) && ( button == BUTTON_NONE ) )
{
buttonJustPressed = false;
buttonJustReleased = true;
}
//sauver la dernière valeur de bouton, pour la détection d'événements de modification fois suivante
buttonWas = button;
return( button );
}
Posté par
sur 09 mars 2014 - 11:29
dans
Programmation
Posté par
sur 30 octobre 2013 - 06:49
dans
Programmation
Bonjour a tous , je vous tien informé de l'évolution de Jarvise ( agent de conversation IA ).
Mise a jour de Jarvise.
Les modification apporté par moi est Mouad
Allégement du graphisme , emplacement d'un menu déroulent qui donne accès a une choutbox , d'un Livre d'or , et d'une boite d'envoi Mail,
Il y a aussi en bas de page, 'un menu déroulent également , pour choisir le thème de Jarvise que vous voulez choisir.
Le mode fonction voix et toujours en coure , le cerveau de Jarvise na pas ù de rajout de phrase , car on s'occupe plus spécialement du graphisme en se moment
je vous tien informé pour la suite , c'est toujours ici http://jarvise.atspace.cc/
si vous avez des idées ou des remarque ou autre posté les , merci a vous tous de suivre mon projet.
@Cordialement.
Posté par
sur 07 septembre 2013 - 12:28
dans
Programmation
Bonjours/Bonsoir
Contenue de l'amélioration de Jarvise.
Petite amélioration de l'interface de Jarvise.
Les conversation stocker avec Jarvise a été amélioré.
Amélioration du code du fichier index ( page principale du bot ) raccourcissement du code .
Fonction d'un envoie d'un mail a été rajouté , mais ne fonction pas pour le moment ( je rencontre quelque difficulté ).
La fonction de la voix et toujours en coure.
Je vous tien au courent pour la suite , a très bientôt.
@Amicalement.
Posté par
sur 13 août 2013 - 11:04
dans
Programmation
Posté par
sur 04 août 2013 - 10:34
dans
Programmation
Posté par
sur 03 août 2013 - 01:49
dans
Et si vous vous présentiez?
Bonjour Husky_4D
J'ai testé ton chatterbot jeanneton j'ai discuté a plusieurs reprise avec quelle , elle répond bien aux phrase con lui écrit , ( elle serré pas du même genre que GENESIS ???) en tous cas bravos.
A tu penser a lui rajouter une voix comme le chatterbot de Holic elle se nome ( Waelin ) il lui a implanté un module TTS (Text To Speech) lui permettant de parler.
Sa pourrai être intéressant !!!
Je suis moi même sur se même projet de chatterbot depuis plus 1 ans ( il n'est toujours pas en ligne ) mais cela ne vas pas tardé
Posté par
sur 26 juillet 2013 - 07:29
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 25 juillet 2013 - 07:43
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 25 juillet 2013 - 06:33
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 19 juillet 2013 - 10:42
dans
Et si vous vous présentiez?
Posté par
sur 26 juin 2013 - 04:51
dans
Electronique
Posté par
sur 23 juin 2013 - 11:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 09 juin 2013 - 12:55
dans
Hack mod customisations et autres modifications
Posté par
sur 09 juin 2013 - 12:05
dans
Hack mod customisations et autres modifications
Si j'ai bien compris, dès que tu l'allumes, il effectue une suite de mouvements coordonnés puis le programme s'effectue en boucle ?




