Posté par
Posté par
Les Dynaximel 300°
Passer par des engrenages (grande roue cotée motreur)
Mais pas simple pour plusieurs tours non.
Mais cela repond a ce que je disais
Tu ne nous en dis pas assez pour que nous puissions te répondre.
Alors soit tu nous décris le projet et nous pourrons t'aider, soit nous risquons de te proposer des solutions qui ne vont pas et nous allons perdre beaucoup de temps.
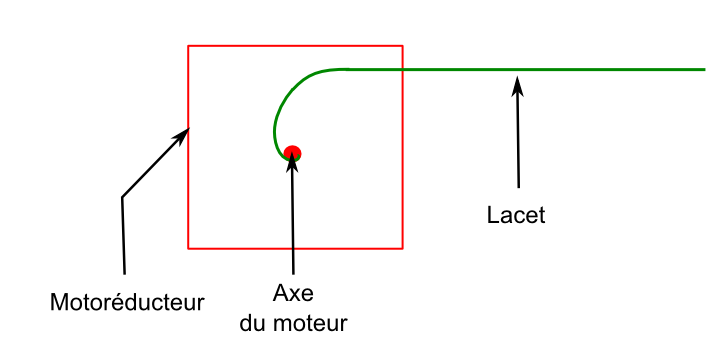
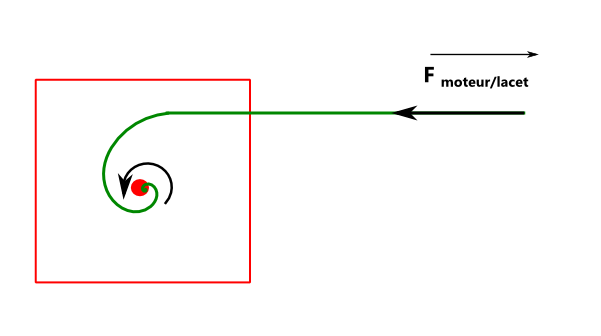
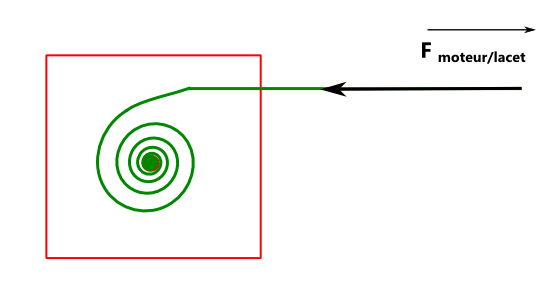
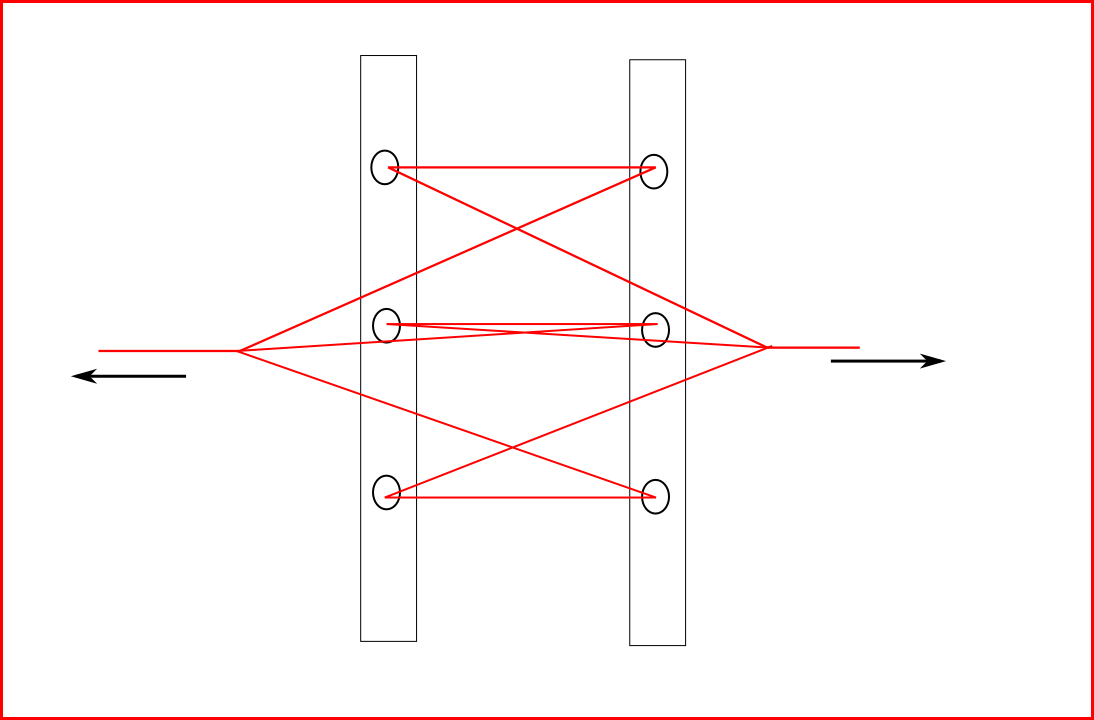
En gros, chaque lacet final du schéma envoyé précédement est relié à un moteur (son axe j'avais pensé, mais une roue, ou autre peut très bien faire l'affaire). L'axe tourne, le lacet s'enroule autour, il exerce un certain couple (si c'est autour de l'axe C = 0,02 N.m), ce qui donne au final une force d'environ 10N. Néanmoins, pour que la chaussure soit enfilable, il faut que le lacet soit lâche (cad 10 cm environ de "marge") il y a donc 10 cm de lacet à enrouler autour de l'axe du moteur. Donc plusieurs tours.
l'action est à faire de chaque côté : d'où 2 servomoteurs. Mais est-ce adapté ?