les belges et les français n'étant pas dans la même catégorie en fait on est 3ème des équipes étrangères  Mais il fallait souligner le résultat " stellaire " de l'équipe belge
Mais il fallait souligner le résultat " stellaire " de l'équipe belge
On était pas du tout aussi prêt qu'eux mais on va essayer de les rattraper en coupe de France =)
Après pour info Robot Maker sponsorise également TDS et les Karibous  Donc c'est un podium d'équipes étrangères qui sont toutes sponsorisées par Robot Maker
Donc c'est un podium d'équipes étrangères qui sont toutes sponsorisées par Robot Maker
( Mais c'est pas les seuls, coffee machine / Evolutek font aussi parti des sponsorisés ... )
Contenu de Mike118
Il y a 1000 élément(s) pour Mike118 (recherche limitée depuis 01-mai 13)
Par type de contenu
Voir pour ce membre
#120667 [Mars Attacks!] Participation à la coupe de france de Robotique 2024
 Posté par
sur aujourd'hui, 10:11
dans
Coupe de France de robotique / Eurobot
Posté par
sur aujourd'hui, 10:11
dans
Coupe de France de robotique / Eurobot
#120665 [Mars Attacks!] Participating in the French Robot Cup 2024 ( Eurobot 2024)
Posté par
sur aujourd'hui, 01:54
dans
Coupe de France de robotique / Eurobot
Result of last weekend's Belgian Cup:
this training was really useful. We identified some mechanical issues that were not optimal and that we need to correct.
We validated that our robot is capable of positioning itself correctly in the right place on a table, but we still need to fine-tune our trajectories a bit, and we need to develop our strategy, especially against aggressive robots that will be starting on our side =)
But above all, we need to have more Pami!
We only had one, and that is clearly not enough to compete with the number 1 teams who had 6!
We still finished 4th out of 26 teams behind the Belgian number 1 Mons'tellair and two other French teams who trained in Belgium like us: TDS and Les Karibous. We had a rather good final score despite all the little problems we encountered during the matches.
Here are the videos of the finals
#120664 [Mars Attacks!] Participation à la coupe de france de Robotique 2024
Posté par
sur aujourd'hui, 01:07
dans
Coupe de France de robotique / Eurobot
Résultat de la coupe de Belgique du week end dernier : cet entrainement a été vraiment utile. On a repéré des points mécanique qui n'étaient pas top et qu'on doit corriger, on a valider que notre robot est capable de se positionner correctement au bon endroit sur une table mais qu'on doit encore un peu "paufiner" nos trajectoire, et qu'il faut qu'on étoffe un peu notre stratégie surtout contre les robots agressifs qui vont commencer de notre côté =)
Mais surtout, il faut qu'on fasse plus de Pami! Là on en avait qu'un seul et ce n'est clairement pas assez pour aller chatouiller les numéro 1 qui en avaient 6!
On a quand même fini 4 ème sur 26 derrière les numéro 1 belge Mons'tellair, et deux autres équipes française qui s'entraînaient comme nous en Belgique : TDS et Les Karibous avec un score finale plutôt bon malgré tous les petits problèmes qu'on a rencontré pendant les matchs .
Les vidéos des finales
#120657 [Mars Attacks!] Participation à la coupe de france de Robotique 2024
Posté par
sur 23 avril 2024 - 11:17
dans
Coupe de France de robotique / Eurobot
Je suis passé dimanche et c'était chouette d'avoir vu votre robot en vrai
Malheureusement pas vraiment eu le temps de dire bonjour.
Vraiment dommage cela aurait été avec plaisir de discuter !
Comment gérer vous votre odométrie avec des roues mecanums? Avez vous mis des roues folle ou faites vous votre positionnement grâce au scan au lidar. Un grand bravo pour le travail réalisé!
On fait les deux, on a l'odométrie avec les codeurs qui sont sur nos moteurs, qui nous donne une bonne estimation de notre déplacement et on recale grâce au scan lidar qui voit les bordures de la table =)
#120642 [Mars Attacks!] Participating in the French Robot Cup 2024 ( Eurobot 2024)
Posté par
sur 18 avril 2024 - 09:24
dans
Coupe de France de robotique / Eurobot
Still running late, but making progress!
Yes, the Belgian Cup is this weekend.
Here's a sneak peek of the first version of our technical poster:

The bulk of the main robot's mechanics is okay, although there are still a few points to review/improve
Attached are a few more images:
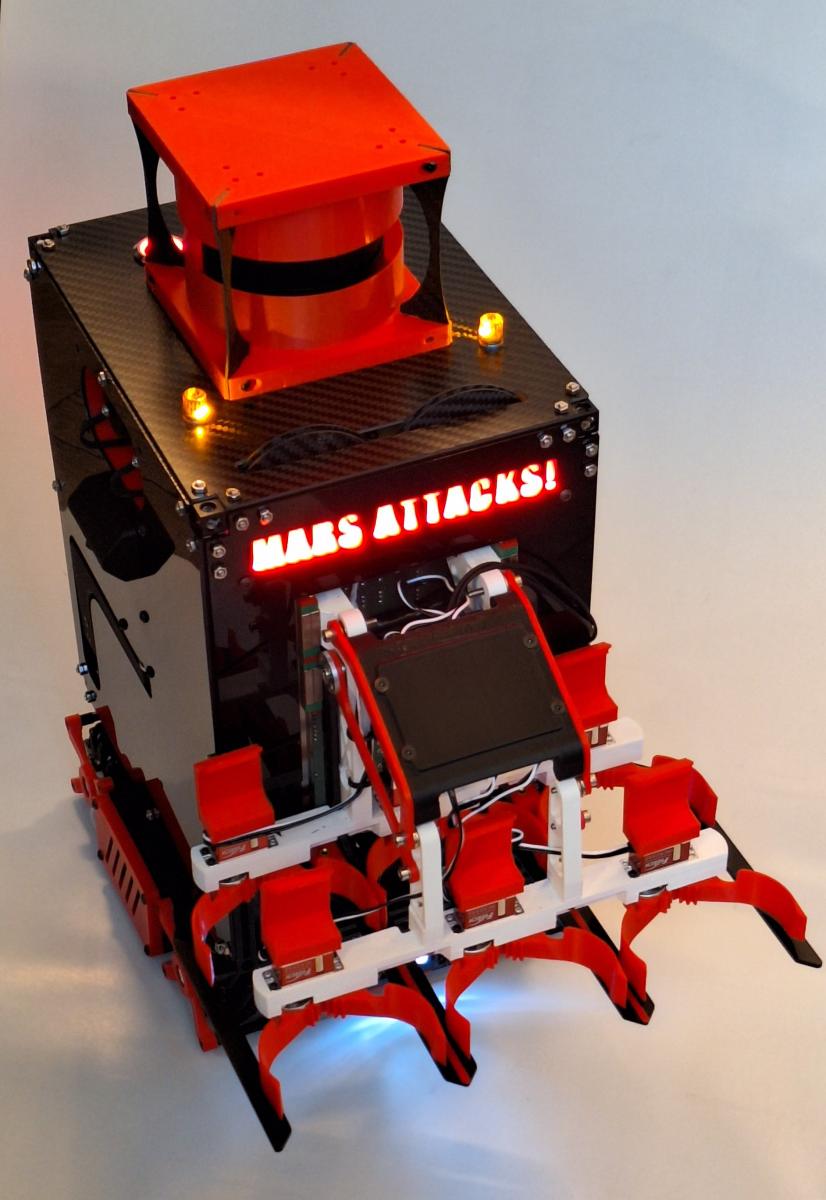
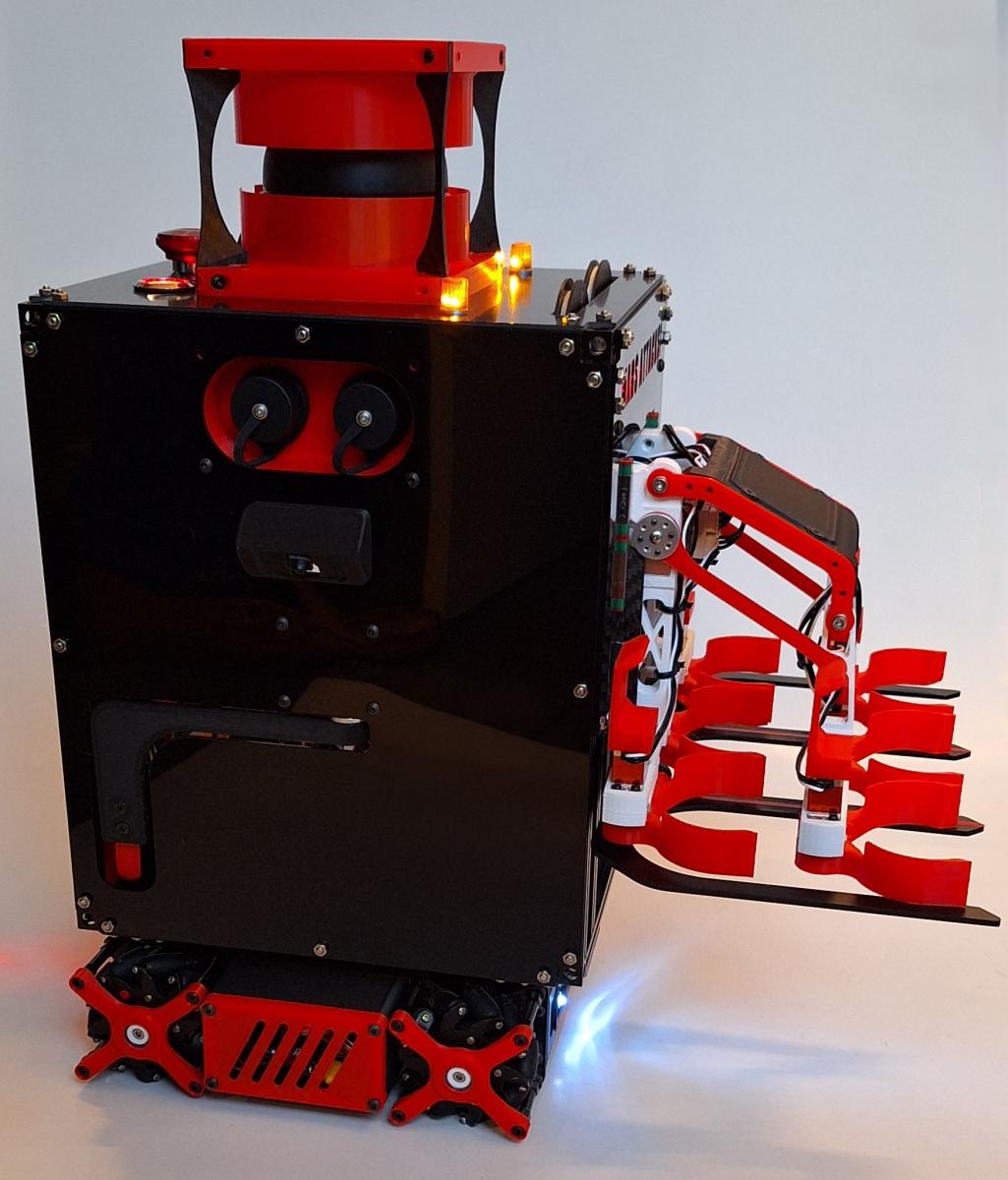

At the back, there's the screen displaying the visualization tool and allowing selection of color and starting position =)

On the Pami side, we're a bit late:

We should have only 2 ready for this weekend!
But it will be good preparation for the French Cup in 3 weeks!
Video :
#120641 [Mars Attacks!] Participation à la coupe de france de Robotique 2024
Posté par
sur 18 avril 2024 - 08:58
dans
Coupe de France de robotique / Eurobot
Bon toujours en retard, mais ça avance!
Eh oui la coupe de Belgique c'est ce week end.
Voici en avant première la première version de notre poster technique :
Le plus gros de la mécanique du robot principal est ok, même si il y a encore et toujours quelques points à revoir / améliorer
Ci joint un peu plus d'images :
Avec à l'arrière l'écran qui affiche l'outil de visualisation et qui permet de sélectionner la couleur et la position de départ =)
Côté Pami on est un peu en retard :
On devrait en avoir uniquement 2 de prêt pour ce week end !
Mais ça nous fera une bonne préparation pour la coupe de France qui est dans 3 semaines !
Et une petite vidéo pour la route :
#120639 Projet de robots joueurs de foot
Posté par
sur 18 avril 2024 - 08:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
Tu as des petits modules relais , regarde relais arduino( un relais monté sur un PCB avec un mosfet ) et tu pourras le mettre à côté de ta carte pour piloter le kicker sans soucis =)
#120625 Projet de robots joueurs de foot
Posté par
sur 11 avril 2024 - 10:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bravo ! 


Il reste plus qu'à fiabiliser pour la prochaine rencontre !
#120602 Afficher une image sur le ESP8266Webserver
Posté par
sur 06 avril 2024 - 10:09
dans
Programmation
Outils intéressants pour les images :
https://www.base64-image.de/
https://base64.guru/...er/decode/image
https://app.imagify.io/
#120580 Tournoi mini sumos en Isère
Posté par
sur 04 avril 2024 - 12:52
dans
Concours tournois et autres compétitions
Merci également à vous de partager ici, j'espère que ça motivera pas mal de gens à venir concourir pour les prochains événements! Voir même à en développer dans différents coins de la france !
pmdd sera une star à "abattre" comme Oracid à la TRR
#120572 Capteur d'empreinte digital
Posté par
sur 02 avril 2024 - 11:49
dans
Autres projets inclassables
ça a l'air d'être un produit sympas.
Je ne vois pas en quoi ça ne serait pas compatible avec le pico =)
Tu devrais avoir toutes les ressources dont tu as besoin ici
#120560 Naissance de mon Sumo
Posté par
sur 01 avril 2024 - 12:53
dans
Robots roulants, chars à chenilles et autres machines sur roues
Il s'agit maintenant pour moi de trouver un projet aussi prenant qu'ont été les quadrupèdes et les mini-sumos...pas facile, surtout que la compétition me stimule !
Il y a la catégorie dans la vrais vie de la TRR ( Tu peux déjà participer dans la catégorie quadrupède et en suiveur de ligne simple avec tes sumo )
Sinon tu as les robots bipède ou les robots volants,
ou si tu as le goût du partage " en ligne ", tu peux essayer de faire un jeux avec plusieurs robots qui sont piloté par internet par des gens  ( petit clin d'oeil à vigibot.com ) ça peut être un combat de sumo piloté par internet, ou bien un jeu de foot en ligne
( petit clin d'oeil à vigibot.com ) ça peut être un combat de sumo piloté par internet, ou bien un jeu de foot en ligne
Bref des projets il y en a plein de possible =)
#120524 Projet de robots joueurs de foot
Posté par
sur 26 mars 2024 - 05:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
NB : au lieu de relier directement à GND, tu peux aussi relier la gate à GND via une résistance (si tu as, je prendrais entre 1k et 10k), ce qui à l'avantage que tu risques moins de faire de dégats si tu as un montage vraiment tordu
= mettre une résistance de pull down sur la gate
#120512 Naissance de mon Sumo
Posté par
sur 24 mars 2024 - 11:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
j'ai hâte de le voir combattre =)
#120509 Projet de robots joueurs de foot
Posté par
sur 23 mars 2024 - 10:38
dans
Robots roulants, chars à chenilles et autres machines sur roues
Essaye de rajouter une résistance de pull down sur ta gate.
#120481 Afficher une image sur le ESP8266Webserver
Posté par
sur 20 mars 2024 - 12:14
dans
Programmation
Ceci devrait pouvoir t'aider :
// Config
const char *myHostname = "imagetester"; // Local address
const char *softAP_ssid = "ImageTester"; // Access Point SSID
const char *softAP_password = "12345678"; // Access Point Password
// Wifi handler
// Wifi manager libraries
#include <ESP8266WiFi.h>
#include <DNSServer.h>
#include <ESP8266WebServer.h>
#include <ESP8266mDNS.h>
// Global objects
DNSServer dnsServer;
ESP8266WebServer server(80);
IPAddress apIP(172, 217, 28, 1); // Default Access Point Ip Address
const byte DNS_PORT = 53; // Default DNS Port
void setup() {
setUpWifi(); // Configure Access Point and Station Wifi connection
}
void loop() {
dnsServer.processNextRequest();
server.handleClient();
}
void setUpWifi() {
// Start Access point
WiFi.mode(WIFI_AP_STA); // Set wifi as Acess Point and Station Mode.
WiFi.softAPConfig(apIP, apIP, IPAddress(255, 255, 255, 0));
WiFi.softAP(softAP_ssid, softAP_password);
dnsServer.start(DNS_PORT, "*", apIP);
// Set up all handlers for all available requests
server.onNotFound([]() {
handleHome();
}); // Default : Display home page
server.begin();
}
// Home Page
void handleHome() {
server.sendHeader("Cache-Control", "no-cache, no-store, must-revalidate");
server.sendHeader("Pragma", "no-cache");
server.sendHeader("Expires", "-1");
String Page;
Page += F("<!DOCTYPE html><html lang='en'><head>"
"<meta name='viewport' content='width=device-width'>"
"<title>Image Display</title></head><body>"
"<h1>Simple image display</h1>");
Page += image();
Page += F("</body></html>");
server.send(200, "text/html", Page);
server.client().stop();
}
// Image
String image() {
return "<img src='data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAMgAAADICAYAAACtWK6eAAAABHNCSVQICAgIfAhkiAAAAAFzUkdCAK7OHOkAAAAEZ0FNQQAAsY8L/GEFAAAACXBIWXMAAA7EAAAOxAGVKw4bAAAAGXRFWHRTb2Z0d2FyZQB3d3cuaW5rc2NhcGUub3Jnm+48GgAAGHFJREFUeF7tnQuULEV5x7/deezOvncviAQUjUqMCKL4iGjijTzkISJgMIJEfARijOKLk3MMMRojSYziWzSKkRiNRuRhEFHxgTkkEUQRVFSiIYKKcnf37nt3Xpv/v6uL2Z3b07szO909Xf39zimmquay0/V99a+vqqemq28diJI8S+eLlK80+eLpIsMfMnklUVQgvcDsgSK1++ANv0yP5B4sMvlLU1YSo99/VZJiFZGC4qAnKBAm5lnH95REUYEkTfXGRuTYCOv4npIoKpCkWV/0MwGEvafEggokccJcoO5JGvWAooSgAlGUEFQgihKCCkRRQlCBKEoIKhBFCcEtgayvIunOmcRYr4vUZ/2CG7ghkMpXRGaGRfaURKbRpPkT/TeU2Jg/BrbPwQ9TSAX4xI1dAOkXSPUWkbljMXotm9Zwi0b5etQ9xntbiYG9h8LmX23sJVuvom63SO127+00k36BLL+64Rib2KrKnSJrn0BGiZS1D2OQuqsxOG30wdIr8Z90k36B1H7kZ5qgkxZfaPJKdCyeZ2wdRA2DVMpJv0Byj/czTdBpXK8vXeAVlQhYgjho41YCyR/tZ9JL+gUy9PfGSUE3r+i45ffgvXlTVrpH/X7YFtOrIHFYf5Te4hXTTPoFkn+CSPH3/UITdB5buHCSV1S6yCJsStu2ih4Dz4ZvDvcL6SX9AiGjX8KIhtegKELKN2HR/g2/oOyYMuxd/pZfaMJGj9F/94ppxw2B9OUx1Xp9sEA4wjEtnOAVlS6weHLDrhux4hj+K6/oAm4IhAz/g2lNK5HUV0RWsB5RdsbK22DL6r7isPQXsfZ4k19IP+4IhIx8JlgghA5d5h0tzsV6ibDr6bFrXS/Dhn/eWhy0/cjVJu8Ibgmk+DyR3EGtowjrF1/sFXuGvv38TABh7yXB0jnGhkECYX3ukfCBW9t83BIIGfuqcVYrkaz8s0jt/0y5Fyietu/12jLf6xVqd4ms/ltrcTCN3eAVXcI9geQONbcYg6Bz2eLF53rFnqB4CtLTG53MJtbxvV5hEWKl/VoJZOAPYPtDTNkhHH2yIprEXb0kyKE1pPFr0QFPNuVeYPX9IuVPmnzxLJHBV5h8L1DGumIeAgkaTq2g93OwGwF3Hz26/DdIfxk86rHFfQMiU6umrITD7evcoRtkR6bht4mULvSqXMO9KZZl6CK0rugXmqCj62sQ0F+bstIaDjKht3WHnBUHcfvh1ZUvicw9yzi31ei3i87PeVVKE7ytO41IG2a/8a+JFHZ7VS7ibgQhheORHucXmrBOXzzdKyoB8GZGkDgshSc6LQ7i/vEH9V9jFDzADAWtRsGJ74vk9ReIm6jciugLAQQJxNpt1wzem/SqXMXtCEL6H4Q58lnGoc1Yx69e7GeUB1i7xLwGRQ/acvBc58VBsnOAzrTv6aDRMI+RcvwWU1YMc4eJVH8QbC+yKxvdxv0IYhl+b3AU8QTS4leJWSZ3ZGt7DV9q8hkgOxGE7H04RsW7N4+KbP2uOdSNmbJiqO8VmW2aQtFWhcMRbdP/tJLtkp0IQib+F3PnF/gFwIX51C9VHEH0T4hM/hyR5BF+BRg8J1PiINmKIEqHsIsErdbdJ1sRROmQbIqDqEAUJQQViKKEoAJRlBBUIIoSggpEUUJQgShKCCoQRQlBBaIoIXQukPWaeYjY3NEii2eJVL/rv6EoCcNzSZZeKjK/2/xkeAd0ttVkvSIyU9y8A4H54rEiY19ERgOTkhALp4isXWvy7Jvsl/3oj1N8lE37dCYQHiew9oXNOrB/ha9DiCxDf2fKioG7Y+s/w+iGSFu7FRH3OyjfC3vNIeE9RmRrQzqWD+Tum0Aah50fKpI/UiT3BKQjTJmbCZUGK29C1HizsR3ZuDuGT3AtHu8P3u3RmUBmSnDm6uaLsPCvMfVBPaOfxYX10EPa4oRRtnwFEmzAh0esLxi7WIJsF0bz/9s/CtGcAPueITKAJBBUFiljoOZv5+tlY5dWfbJvEFFkxZTboDOBzGL0qvM3FH45CP5VpjxGu9GvYOR7pFftNPV7RFYvQXS9HBFidl+HhdmrHTZ67AE774JQXiQy+BqI52DvLafh42MXMKWv/s++dm6G9uGAMtn+SWOdLRaKWABtdFIQvGD+9RqmFbOPQmNO3fr/SSMcX1Y/gDY+BJEVg8HyuyAUiINPEmL7rfPCHNguG/8mP4OfVZ/GZ0OcM7iO2UNwTR90095k8Uy08WHoWxCHtXEYtEMRg0cHdP57kLmnILzdvP0LtAy9VaT0Br+QYtaX0CFfjbnvR0zZ2mArW0SNtbV9LZ0Hm0O0fZgWp52Vt8PmF5q20c7b6XdMeazbJjq7y9q5QMjax6HmP2r/gvsHzBFdheO86lTBxfbSH5v1xXbbnRTW3mQQo+7QP8L2WPSnjcrXMQM5GbZfbq+f8d8No82D8FeH7EwgFh4Yv/w+E01IWAPsp/G1cKQ5X7B/f1PX6yy9DKPYZY32beWoXmGjzUvno9Ng+pUG1jFVnT8eAvnW9mxu28m7VkMQBQeEHfqoOwIhXLQvnIjG/Fd7jeHr4FkiI58w5V5k7UpEyjPMtbJNOzR6YvD6bRtGr8a8HOvCXoUHHa1+rP2+xKc9jvIriO4cPtQ9gVi8cHgCBLNmGrVVZ7JOY/QZeg/EgmjUK/CJ5vNYa1W+vb22pAVr8+KTRca+6VX1DLy5sPxyEwXa6j85COM6CAQRp4t0XyCWlXebRSz/ejsNLcBp4z3gtMr1InOIiPa6t7r+tGG9ztfxG2D3Y0w5SfYeKlK9q73+QiI8fsGuGrpP6QLz5PTBF5rRwDamFTQIr6ZyM0aRt3tVibH0Zw1xbMdZaWRj2+aONYNZkiyeY8Sx3buiTLzxsAszlQiPX4gugmykdjcMcJpI+baGJFsZgVeTe5h5hlUSzB6M6/15o/NkAdvhcg8VmUzo/MZWj4bdCK/R2zZyGNasV+F6H+VVR0l0EWQj7PDj30G6FgYYaDikJbRCzHAryMwQPhri2M4o5hJsK9vMvWIzo7DFslcdG1v1BysM7k8bhzDGvxeLOEg8ArHwTEAeezb05oZRmg3D8sDLTD4u6vehY4zhs1eyJYxm2Pb1RdhiGDbZY+rigJ+bf7TJb2RjH+GJYVMV9KF49/bFM8UKgneIeOt07XOm7DkHid+NMNrERfVWLA5bnIORVWyP4GNG84f7hYip3QM/YIrHz7Z+YH4Aa8GRq1HX4ji9iElOIJbqnVibfAgj1v0QB4wxgEV9XHiR40AVRxDsFUxT8EuXvlPYkvqMuVlQw1o1h4gyiKjBbSIJkrxAkoJrjmlMq1QcrWHPoG0ml/CK9VkGiXcN0kvMHqDi2ArahiKhrTJKNgXCrelZX5BvF08kWLhze3kGyZ5A+CVg7V4VRzvQVvyB0lLCXyYmQLbWIGV/+wiHBRVIe7CXMI19WbyHc2SE7AiEt5WnC0YYKo7OsCLZj08IycbkIztTLO7KVXHsDGu/ud/xilkgGwIpX2m2rCvdoXILbHqNX3CbbEyxtrMRTtk+tsdk4Kx09yMIfz9OP6o4ugdtSZsuvdwruozbEYRPLJyeNA5VgXQX9homx8+YdzuCLJ6n4ogKa1PHo4i7EYTPrZoeUYFEyQNRhM8fSGa3bdS4G0HsT0hVHNFhbbv8Wj/jHo5GEDRpD7Sv0SN6bBTZz8FuBNyMIKuXmlcVR/RYG6/9k59xCzcjyN6H6IbEOGEPyv2myMRPTNkh3IsgPIKgCnEo8VL9qfmFpmO4J5CVS8yrRo/4sLZefbefcQf3plizUxjJ/MNrlPhgL+p/sMjkL03ZEdyKIDz2zJ7spMRPDVMsx1a0bgmkcoWKIyms3StX+Rk3cEsgPDBTBZIctD194BBurUG8x2YuqkiSgj2pb1JkasaUHcCdCMKFOcWhJAtPheIzxxzBIYHcY0YwJVnoAz4A3BHcEUjNP8VUp1fJYW1fu8PPpB93BMKHUCu9gUO+cCiC3KbRoxegD6oxPp0/Ytxagyi9wbo7e+Eat3lX3ytS+RoyS6z2qnZOHX9qf5Hi85BO8+siYnY/fNy0RpGkYW/KHSQyEbFIyp8zj3Na5y3lbo3zuPi+YZH8M0QGz/dqjEBmd2GKgg+KqnN558o9SWT8ZlOOgpk82ldTgSQNBcJONhXhLfe5p0Ic/x3d/McTudlX1i9LLzXi4Iexc0WR+Lf5sLEod3tSHEqPwFlIRKy8A33JF0dQX+tG4t/mvrKl85DlE/JYGSX2g8uf8oqRkMC5n0oLovQF+5DtT1Hi9derqBXKJS4wDVKUFNEvxdPNnCtK+Pe9dchZXjES4tS5Ek6Uvij+oelPcfTZ4ml2kb7h8PxuYxtS3C0yxrtkEaGL9N6A/u4bwSI9wv1YMS7SG7d51y7H4udGZHj3oVufzNu8uzwlSuF4vy4iZvfHx+1RgSSN17kw4E5E/L1UrLd5XWDvIxAFf6oCSRr2pvxhIuPfM+WU487Mvf+hfkZJnL6H+Jn0445Ackea0UtJFi+CwBeO4I5A8kf5GSVxHPKFQxHkceZVo0hyWNvnDvcz6cchgWDeqwv05KEP+g8yeQdwRyB9E0ijfkFJjP4p+GHEL6QfdwRCiif4GSUxCif7GTdwTCBn6BokSWh7+sAh3PmikHCryZ481iN+WYkP9iImHg3t0FrQrQjSB2XkMQd2R/LpIvcbTomDuCUQUnyxCiQJaPPBc03eIdyaYhE+tGzmYDOS6W3feGAPYpr6FYbcB3lVruBeBOE9+Lzuy4qd/COdEwdxTyBk8A06zYoT2rp0kck7hntTLMsezK90mhU9dnqlx0CnjNJ5GkXigDYuvdLkHcTdCLK+IjI9pFEkSthzmHaVYeOCV+Ua7kaQvpLIwPP9ghIJFMfgC50VB3E3gpD1OUQRbmJEXqNId3kgeszDtu5uEnU3gpC+ccyPzzeOVLoLbVp6hdPiIG5HEMu0Hz40inQH22O478px3I4gltGrG1MCZWfQhnwI4Ni1XtF1shFByNxTRKo3axTZKewthaMhkJtM2XGyIxB6dg8Cpi7YO4c9hcnRLwWDyMYUywOqGPtyw8lKe1i7jUf4+NgeJEMCAcVjRUqvUoF0Am1Weh2mV7tNOSNkaIq1gdlDsND8mU61tgt7SP/DRSZ/asoZIpsCITOjcPyiimQrPHGMQRxzppwxsiuQ9WWIZNjkVSTBsGfQNpMreB30qrJG8muQys0iC6eK7H2MyOLZmPpM+29ETN8QHH+/6QTZHCLCsTaZmI1PHPUZ9IEXoC8chtdzRKq3+W8kR3IRhNObheeIlL9mRimvDon5CawP+KTEOKjeITJ3hMlrJDE8II4fwg+/5RcipnYP1ob+L0HpB3sNA+gjI59FXTLH9yUTQZYvFJnGGoDnstMYNtmrWTzRz8RA/nBEkj0mn8xQ0VtYG0ztjU8cZP6pjT6w8ZUH5UwX0GfejEL8xBtB1j6Nzu+fMWdF0QzfY4r7yyiuSWYPwGuGF+40ORfkE7+GDQZMXRyslyECfN5WfaK/aKJJ8dledRzEE0GqP8C8EqPRAsRB7OjQiniuajNck/BcvX7eAkY5Zn0mCtvKNnu3cufiFQfpQ8cP6w9WOBTS3ClIjzOnicVAtF1xfRUR43Sz6Kr9eGthEDqreJ7JJ8Hk3SKlC8x1ZEEktp1Dr0PbE/yegz9uC7O3FQmfmlm9HdH+EehbZ+P/qfLdyIhuirXytyJLbzB527gwrKMKTxAZv9WrSpTKDRipjmtc91bXnzas1/nK7SO98A353KNh9x+111/I8DswqL3WL3SX7guk8kVMpbDIruPPttPQfvzD4csxkpzjVfcGuLD5p2CheMv22pIWrM2LWBiP/adX1TOsvg8L8leaKV9b/QcL+dEvQOjHeNXdonsCqd9vhFHB6G8bFdY4+6l8Lf0JxHGpKfci5WvQtueaa92O03oVXj8Tp7oj10IgPXxUAadPq59svy8VnmyEwnNKukB3BLKENcPyh43hybYbwxHsS/j3KTlwZenlmDp+0OTTJBTa2tqdP5MdxiidBrxB93gMurc1bL2dvsXoM9SdQXdnAlm9DJ3mZebCttNhrKNyoxjBGA6f5lWnivo8BgMIhaMb2U67k8Lam/DpI0MfwCCWwt+Qcz248GzYfq29fsZ/N/wRtP2lrO2IzgXCg/ur/sH9271gMnIJLvg1fiHFrMNZy69DRHm/KVsbbGWLqLF2th1kEPP5ISxiXXg0D2/8LPuPlW2n3+Wx+J+406tql84EMn8c5uVQ9XZuEtuLHHw+xPEpr8o5Vj+KdDEGjJ+YctxisR60r3yQ9OBFSC/yKxxj4TSRtau3JxLCKdfACWZt0ibtC2Qdn7YnZ8QRdnH8q7ywwqNwYRBTLgNPXK//CkJ5F5z3MZHafaau2UY7FU2zt2w5dyA6wUsgilfBN+49ZX0fahiMFo7FoHS3selWfZFpFzpkX3sO6EAgqxBIqbVA7MXwttvINSLFGPdV9Rrlq5A+izn0dRDPrLGLpV2hNP+/vEvDAzN5JmDxVFOfRbhXa4FnU1aNXVr1SQ7W+3Ebkf8Th23S2RRrFgu9etOeJftX+DqM8F56iykrBu7xqt+LEe8OjH634vU21N2Dujm87kVaMrYjnqNHkCYghDG8Ivrmj0SUOMpsruQZKA4dtdwVlv8CCdNc2yeb+6a3lQg2bpPOBFL5BhbpzzBRxMK/wmOYx9qf5ylK15hHHyx/cbNAGD0mb8LgcrQpt8F2ltn7Uvg9fCBGwAJFcoCZRk1iZFRxKEkzdr3IxHfQJ09B38RajH108vaOxEE6iyCKkhE6iyCKkhFUIIoSggpEUUJQgShKCCoQRQlBBaIoIahAFCUEFYiihKACUZQQsieQlYtFZg80D4lbeaNfqbSEP1DaezDs9XCR1ff4ldkhW1tN5o4SqXy7sZGNLS8cLjJ+uykrm+HD/qo/btiLm/4GdouMZeeUqexEkJV3GnGwxXS4TZU7RNY+joyyidUPNcRhE21X/jreuxyZbJAdgSy/1jh5I9bxFd2FvA+V6xv2sdjy0rleMQtkQyCLZ/o/mjHFTXj1WJMom+nb39imGdqQ9XwEUgZwfw1Sv09kGgKwU6uNsOVMkz8SyR3qVSk+1VuxBnmisVmQ3byfsC7gPbd/2eh+BFk4LlgcloHTVRxB5I8SKT7TLzRBW9KmC8/yii7jdgTh2mLuJOPQoFGQqYMnXWQG/k5+mr+NR76V/cZvEil09mu9NOB2BOERb0HOJXTu8FtVHGHwCSBDFxpbNWPtuogByGHcFQiP7Kq3ODuCDu8fEin5xzMorRl6G2wFJQSJhNTmnP4C0U2B8OF2K29qjHLNcIE5cqXJ9wor6Ij8InPuSehw7/Qre4SRf90iilzgFV3EzTUIH3Rc/nywONhaLkDHv2XKvcDcE7Fe2nBsBK+x+HSRsf8w5V5g76GIFncF25QDzuDZENK/mLJDuCeQ2g9FZn/bOLLZmWwpnbnrZ4idMR0zvRV88uL88zZfL6+TiY9R4rPGeoHq9yGSx7a2K9PUvbDrQV6VK7g3xZo/JtiJhE4svbh3xEHKV+x7vTZfudrP9AD5w0QGWjzi1F4/b6k7hlsCWfsMIsgvNnc2C8XB+pHLvGLPsD7tZ5rgtbZ6Lym4FiG0ZRCVOyH4G/yCG7glEG4pCRIHoVOHeLJSq3+QFGEu6DH39JVgw7cEC4RmZVp8jld0BXcEsvR647ig/s/6HG/rvsKUlc4pXWR6TasoUl8RWXmrX0g/bghkvSKyzFOU/PJG6Eim0eu9otIFRj7fsOtGbBRZgogcwQ2BcE8QWxIkEMJbpvnf9QvKjimeJFI40i80YUXCU4EdIP0CqX4TC8MWv3DjCMfbuqPXeUWli/A4M9q2OYpY1q4Rqf3YL6SX9Atk+Y2NUasZOm/oAryXwpNde53+B2M9cm6wQKw/+Hv2lJN+gdQQQYKg4+ik4Xd5RSUCRj5qbNwqitR6aLdCh6RfILnD/EwTdJqDWx96C6hj+P2tBdKf/t/ZpF8g/G7DzoVtYrlwhMjA2cgokTL4pxikDgz2wfAl+E+6Sb9A8o8XmbgRg1mp4aSBk0TGv+u9rcTA5C8wID2tIQ76gj7JPdZ7O824tVmRv4CTYTMvTgsLAYdOEk/oZ2Ka+GlTTgPrNfxnBW1x53fq6Y8gG+Ev4NIkDtfoyzklDuKWQBSly6hAFCUEFYiihKACUZQQVCCKEoIKRFFCUIEkTtjXUO58RZVWVCCJM+y/BuH2g6HTgAokaQrPDA4UrCvsNnklMdw//iANzO4Sqc00dgHQI/mDRSbuMWUlMTSC9AKT0yKll8AbEEr//sifr+LoCUT+H40VSTOc3kHkAAAAAElFTkSuQmCC'>";
}
#120471 Vidéos Bipèdes
Posté par
sur 17 mars 2024 - 08:34
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est impressionnant.
#120468 bonton marche arret pour moteur pas à pas
Posté par
sur 17 mars 2024 - 01:13
dans
Conseils et aide aux débutants, livres et kits en robotique
J'avais fait une petite faute de frappe dans le code je suis repassé dessus et j'en ai profité pour simplifier encore un petit peu le code.
Pour ce qui est de faire fonctionner plusieurs moteurs ensemble oui on peut le faire sans soucis... mais il y a mieux que juste accelstepper après ça dépend le besoin.
#120463 bonton marche arret pour moteur pas à pas
Posté par
sur 16 mars 2024 - 06:05
dans
Conseils et aide aux débutants, livres et kits en robotique
Et si tu essayes ça :
#include <AccelStepper.h>
const int boutonmarche = 12;
AccelStepper stepper1(AccelStepper::DRIVER, 2, 3);
AccelStepper stepper2(AccelStepper::DRIVER, 5, 6);
void setup() {
// Serial.begin(9600);
pinMode(boutonmarche, INPUT_PULLUP);
stepper1.setMaxSpeed(1000);
stepper1.setAcceleration(400);
stepper2.setMaxSpeed(2000);
stepper2.setAcceleration(400);
}
void moteursMarche() {
stepper1.move(4000);
stepper2.move(800);
}
void boutondecommande() {
static bool etatboutonprecedent = HIGH;
bool etatboutonmarche = digitalRead(boutonmarche);
if ((etatboutonmarche == LOW) && (etatboutonprecedent == HIGH)) {
moteursMarche();
}
etatboutonprecedent = etatboutonmarche ;
}
void loop() {
boutondecommande();
stepper1.run();
stepper2.run();
}
#120411 [Mars Attacks!] Participation à la coupe de france de Robotique 2024
Posté par
sur 07 mars 2024 - 03:37
dans
Coupe de France de robotique / Eurobot
Avec encore une fois beaucoup de retard un petit compte rendu de l'avancement du mois de février :
Beaucoup de tests mécanique ont été effectués :

Quelques petits problèmes sont observables notamment avec les pinces simples :
Les pamis font leur premier tours de roues ( il y a une inversion gauche droite liée à la vidéo)
 VID-20240217-WA0002.mp4 4,91 Mo
15 téléchargement(s)
VID-20240217-WA0002.mp4 4,91 Mo
15 téléchargement(s)
On se fixe sur un premier design, la suite au prochain épisode, le but c'est de se préparer pour la coupe de belgique qui aura lieu les 20 et 21 avril !
#120410 Projet de robots joueurs de foot
Posté par
sur 07 mars 2024 - 11:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
Il faudrait vérifier l'ampérage que vous voulez faire passer dans les différentes pistes... Je pense que les pistes juste après le connecteur xt60 peuvent être plus grosses...
Sinon pour info il existe aussi des connecteurs XT30 plus petits qui à mon avis peuvent être suffisant pour vos besoins en courant ... ( Mais à confirmer en fonction de vos besoin)
Il peut être utile d'avoir un bouton d'arrêt d'urgence qui coupe l'alimentation des moteurs mais pas de microcontrôleurs et des ordinateurs... Mais ça c'est un autre détail...
Pour le reste sans schémas et sans savoir ce qui a besoin d'être branché, difficile de donner plus de conseils.
#120408 Servo feetech STS 3009 et couple
Posté par
sur 06 mars 2024 - 07:54
dans
Electronique
Je ne l'ai encore jamais utilisé en pas à pas ...
Peux tu poster une vidéo de ce que tu fais et du résultat obtenu et décrire en quoi ça ne correspond pas à ce que tu voulais afin que je comprenne le problème ?
#120401 Test LD06 library
Posté par
sur 04 mars 2024 - 10:10
dans
Programmation
Je n'ai pas encore mis à jour la librairie... Je prends un peu de temps pour voir comment l'optimiser au mieux...
#120395 Servo feetech STS 3009 et couple
Posté par
sur 03 mars 2024 - 01:30
dans
Electronique
Alors, j'ai pris le temps de tester.
Quand tu désactive la case " torque Enable" le servo se met en roue libre, tu peux le manipuler comme tu veux.
Quand tu recoche la case le servo son couple mais rest à la position actuelle.
Quand tu veux déplacer le servomoteur le système réactive automatiquement la case " Torque enable " car sans ça le servomoteur ne pourrait pas bouger.
Bref désactiver cette case est uniquement utile si tu veux pouvoir bouger à la main ton servomoteur, ou si tu veux que le mécanisme arrête de forcer par exemple.
#120382 Loopathy
Posté par
sur 01 mars 2024 - 06:36
dans
Et si vous vous présentiez?
Welcome !




