Hello,
Je viens demander votre aide car lorsque j'upload le code, la led orange reste allumée et rien ne se passe. Savez-vous que signifie ce comportement?
@ Path, je suis curieux de voir tes photos. J'utilise également PID !
Merci
Il y a 8 élément(s) pour Antimatière (recherche limitée depuis 01-mai 13)
 Posté par
sur 20 février 2016 - 05:03
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 20 février 2016 - 05:03
dans
Robots roulants, chars à chenilles et autres machines sur roues
Hello,
Je viens demander votre aide car lorsque j'upload le code, la led orange reste allumée et rien ne se passe. Savez-vous que signifie ce comportement?
@ Path, je suis curieux de voir tes photos. J'utilise également PID !
Merci
Posté par
sur 16 février 2016 - 01:53
dans
Robots roulants, chars à chenilles et autres machines sur roues
Hello,
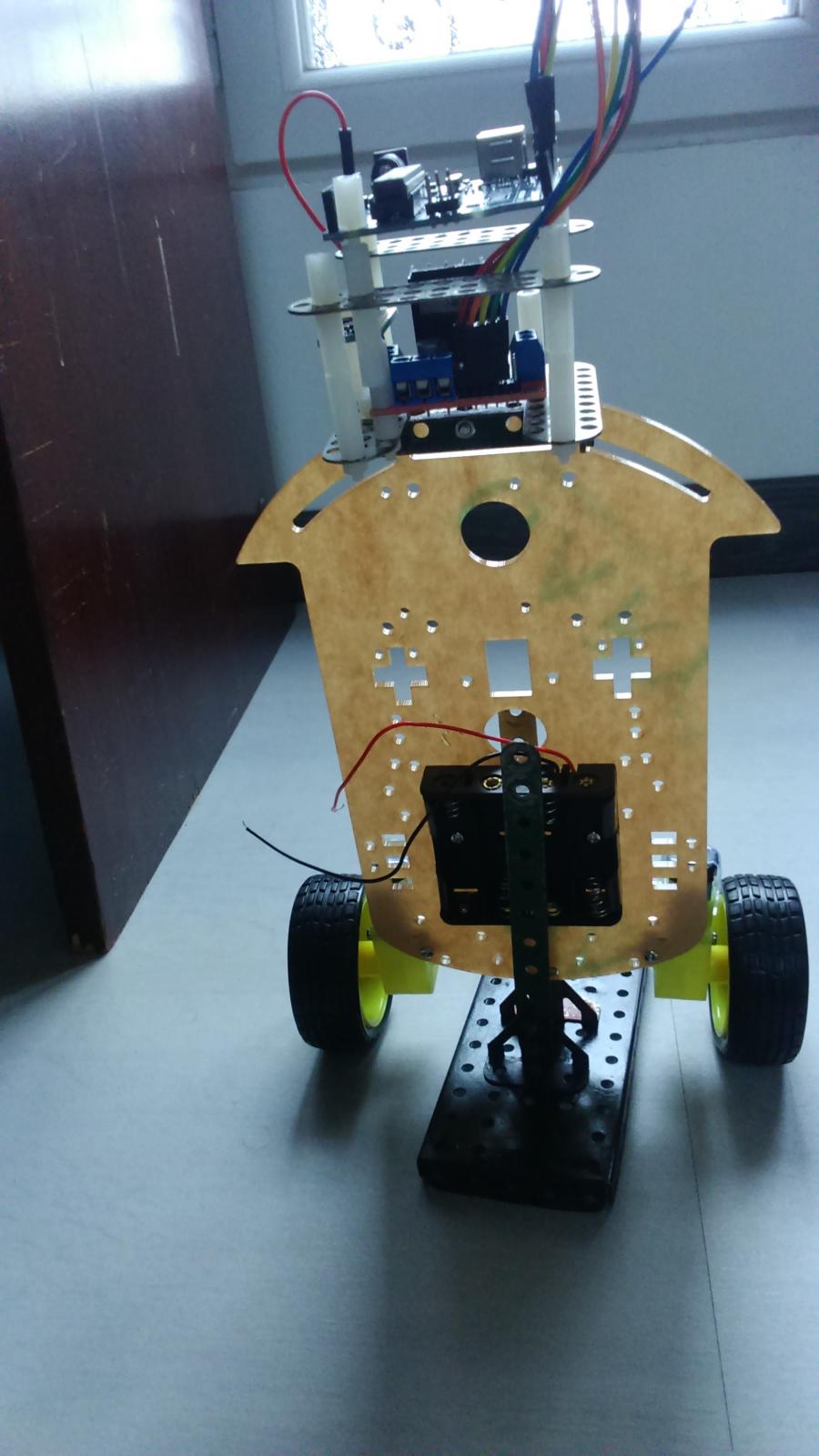
Je suis en train de construire un robot gyroscopique avec capteur d’obstacle.
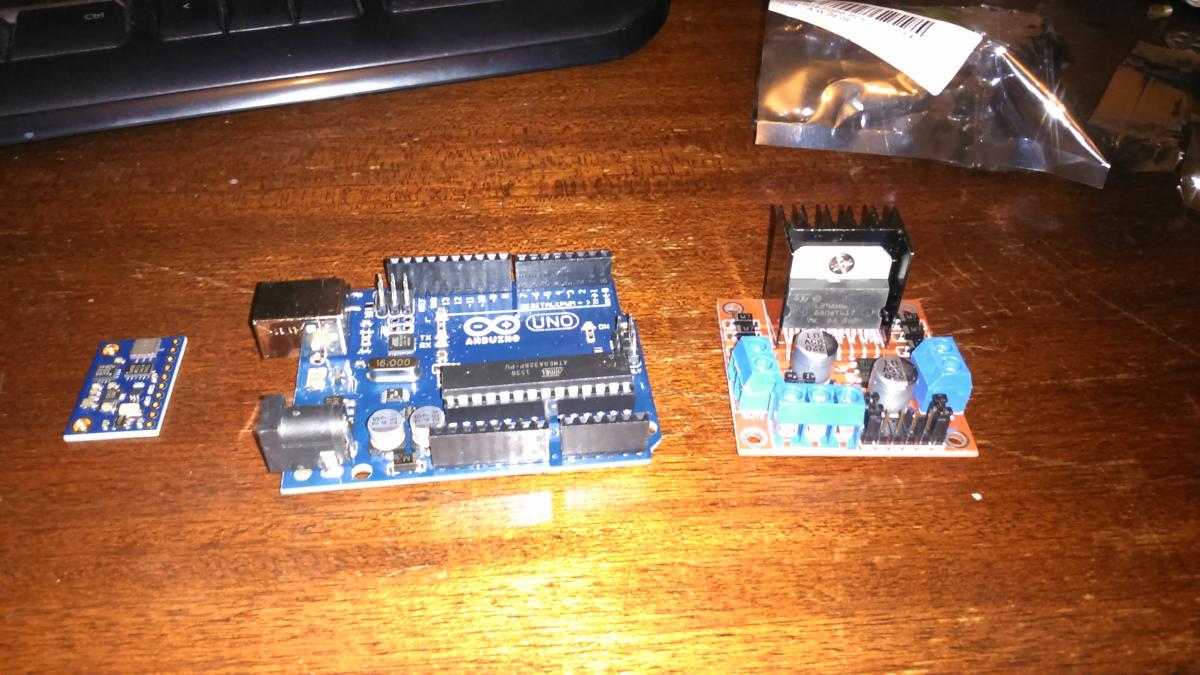
Tout d’abord les composants :
18.53 euros
4.51 euros
17.41 euros
10.01 euros (oui je sais c’est une contrefaçon)
1.49 euros
A la louche l'ensemble coute environ 60 euros.
Pour le moment j’en suis au montage, voici quelques photos :
Je posterais des photos et des commentaires au fil de l'eau.
Bonne journée



Posté par
sur 13 novembre 2015 - 09:37
dans
Drone, Robot volant, et autres machines volantes
Hello,
Désolé pour ces interventions qui s’inscrivent dans le temps de manière erratiques ! voici des réponses :
Pourquoi à la base partir sur un dirigeable? Un avion style planeur ne ferait pas l'affaire?
J’espère que l’ dirigeable disposera de plus d’autonomie qu’un planeur. D’autre part, le décollage et l’atterrissage peuvent être complètement autonomes, laissant envisager un retour à la base de chargement et un retour sur site (pas loin, bien entendu) sans intervention humaine.
A quoi sert le servomoteur et le SRF04? A mesurer l'altitude? Si c'est le cas, pourquoi avoir un servomoteur?
Les SR04 sont utilisés pour balayer l’espace à la manière de radar d’où l’utilité du servomoteur. Je pense en mettre 2 en « longitude » et deux en « latitude »
En mécano ?
Juste pour la maquette, par la suite j'imagine le faire en bois.
Bien à vous,
Posté par
sur 21 octobre 2015 - 07:29
dans
Drone, Robot volant, et autres machines volantes
Bonjour à tous!
Ce dirigeable a pour but de faire des relevés topographiques 3d. pour le moment j'ai réalisé une nacelle en meccano avec la carte rspb, une caméra raspb (en attendant peut-etre une go pro), 1 servomoteur sur lequel est monté un SR04. je vous donnerais le poids la nacelle à l'occasion.
Merci mike118 pour cette proposition qui s'étudie. Comment procède-t-on?
A propos de l'Hélium, j'ai cru comprendre que le gaz s'échappait et qu'il fallait régulièrement regonfler les ballons, est-ce le cas?
Merci
Posté par
sur 19 octobre 2015 - 10:25
dans
Drone, Robot volant, et autres machines volantes
Je viens de voir ce sujet, qui semble pas mal :
Posté par
sur 19 octobre 2015 - 09:50
dans
Drone, Robot volant, et autres machines volantes
Hello,
J’envisage de construire un dirigeable embarquant un Raspberry, une Gopro pour transmission en direct, 4 moteurs + hélices ( 1 pour monter, un pour descendre, un pour reculer et un moteur rotatif pour avancer et diriger) , un accu, ainsi que plusieurs autres instruments de mesure (légers) et éventuellement des cellules photo photovoltaïques souples sur le ballon pour préserver l’accu. Le tout avec un budget de 1000 euros environ.
J’ai des connaissances en programmation, électroniques.
Plusieurs questions se posent, et notamment sur le ballon :
Quel gaz utiliser ?
Quelle matière utiliser pour le ballon ?
Et comment réaliser le « moule » du ballon ?
Si vous avez connaissance de projet similaire je suis preneur aussi !
Merci
Posté par
sur 07 octobre 2015 - 01:19
dans
Programmation
Hello,
Pour info, le code suivant fonctionne :
import RPi.GPIO as GPIO from time import sleep GPIO.setmode(GPIO.BCM)
Posté par
sur 04 octobre 2015 - 05:54
dans
Programmation
Hello,
Je suis en train de refaire le programme+montage trouvé sur ce site pour ensuite l'adapter sur un robot : http://jmdefais.pagesperso-orange.fr/techn_jm/radar/radar.htm
Et j'ai un probleme lors de l'execution du code sous raspberry cmd :
pi@raspberrypi ~ $ sudo python /home/pi/Desktop/radar_3.py




