Contenu de Gyro49
Il y a 244 élément(s) pour Gyro49 (recherche limitée depuis 01-mai 13)
Par type de contenu
Voir pour ce membre
#55229 Et vous où habitez vous ?
 Posté par
sur 08 avril 2013 - 07:26
dans
Apérobots et autres rencontres IRL
Posté par
sur 08 avril 2013 - 07:26
dans
Apérobots et autres rencontres IRL
#55037 robot suiveur de ligne arduino
Posté par
sur 02 avril 2013 - 11:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pour les capteur tu as les capteurs en lignes
http://www.robotshop.com/eu/productinfo.aspx?pc=RB-Cyt-110&lang=fr-CA
ou à faire
http://www.bricobidules.com/index.php?post/2012/03/12/L-encodeur-du-pauvre
@+
Gyro49
#55299 Un robot collectif, le robot des robot-makers
Posté par
sur 10 avril 2013 - 05:46
dans
Robotique ludique, robotique insolite
Juste en passant, et je n'ai pas pris le temps de regarder les dernières posts.
Je viens de voir sur internet l'utilisation d'un alume-cigare comme alimentation 5V, ce qui pourrait permettre l'utilisation d'une batterie 12v pour les moteurs pas à pas (200 pas donc plus besoin d'encodeur).
Avec un simple L293B par moteur il n'y aurais pas besoin composant en plus.
Gyro49
#55471 Un robot collectif, le robot des robot-makers
Posté par
sur 15 avril 2013 - 08:51
dans
Robotique ludique, robotique insolite
Le choix est de partir sur un moteur à CC associé à une roue codeuse.
La carte alim devra gérer les moteurs, la RPi, les capteurs.
Mais comment connecter la RPi, par le mini usb, le GPIO ?
sinon pour l'encodeur j'avais :
http://www.bricobidules.com/index.php?post/2012/03/12/L-encodeur-du-pauvre
Je suis toujours sur le coup, mais je me prends la tête avec ma RPi et opencv.
Gyro49
#55567 Un robot collectif, le robot des robot-makers
Posté par
sur 20 avril 2013 - 10:51
dans
Robotique ludique, robotique insolite
C'est bizarre mais nous venons de refaire un retour à la page 3 de se post.
Un cahier des charges semble inévitable
Gyro49
#56218 Un robot collectif, le robot des robot-makers
Posté par
sur 18 mai 2013 - 09:30
dans
Robotique ludique, robotique insolite
#56082 Un robot collectif, le robot des robot-makers
Posté par
sur 12 mai 2013 - 11:09
dans
Robotique ludique, robotique insolite
Rp 35 euros c'est du classique
Atmega 9 euros Snootlab ou HobbyTronic
moteurs 35 euros HobbyTronic
capteur 15 euros hc-SR04
roues 5 euros http://www.robotshop.com/eu/pair-roues-tamiya.html
batterie 20 euros (http://www.atlantique-composants.fr/eGold/Tools/Modules/modListProduct.php?_pstrSubPrj=STORE&pintHeadingID=1&pstrMenusID=1_3_2)
chassis gratuit -> vieux calendrier
il manque la petite électronique
Gyro49
#56078 Un robot collectif, le robot des robot-makers
Posté par
sur 11 mai 2013 - 10:59
dans
Robotique ludique, robotique insolite
Personnellement je me détache du sujet, en effet c'était le risque annoncé il y a quelques mois. Même si le sujet regroupe un sentiment positif par tous nous avons, tous des idées bien précise du rendu final.
Même si l'objectif de ma construction est identique à la votre, j'ai pris un autre axe de recherche.
Je vais associer une RP a un ATMEGA328P (arduino lowcost)
Les moteurs seront des pas-à-pas de 12v avec 200 pas, donc roue codeuse par le fonctionnement des pas.
Re-donc batterie 12v
Rp 35 euros
Atmega 9 euros
moteurs 35 euros
capteur 15 euros
roues 5 euros
batterie 20 euros (http://www.atlantique-composants.fr/eGold/Tools/Modules/modListProduct.php?_pstrSubPrj=STORE&pintHeadingID=1&pstrMenusID=1_3_2)
chassis gratuit -> vieux calendrier
il manque la petite électronique
Maintenant mon projet devra pouvoir évoluer en intérieur avec des obstacles et accepter les tapis de 1 cm d'épaisseur
Je vous souhaite bon courage à tous
Gyro49
#55204 Un robot collectif, le robot des robot-makers
Posté par
sur 08 avril 2013 - 10:07
dans
Robotique ludique, robotique insolite
Je suis également partant.
Compétence : imagination débordante
Maintenant 100 euros ça va être juste
Raspberry 35 euros (achat + livraison)
deux moteurs + controleur 20 euros
clef wifi 10 euros (communication et reprgrammation)
communication entre robot IR 15 euros (évolution vers le Swarm bots c'est prétentieux ?)
Chassis low cost même avec récupérartion 5 euros (visserie et autres)
capteurs ???
arduino en esclave pour les mouvements???
webcam 15 euros (OpenCV)
Un serveur, chaque robot pouvant se connecter au serveur pour le Swarm bots. Personnellement je vais me monter deux chassis avec deux Pi et un Nas afin de faire des test sur le Swarm.
Il va falloir augmenter le budget si on veut un robot mobile interacrtif évolutif.
Gyro49
#55313 Un robot collectif, le robot des robot-makers
Posté par
sur 10 avril 2013 - 08:53
dans
Robotique ludique, robotique insolite
Je suis très cartésien, il me faut une vision claire du produit.
J'ai bien compris la démarche générale avec la notion de travail en groupe pour un projet évolutif -> oui et re-oui
def : Un robot-maker (faudra donner un nom au projet) -> unité mobile et autonome en énergie... euh ! des roues ou des pattes ?
Avant de parler du choix du matériel, est ce qu'il ne serait pas judicieux de parler finalité, objectifs:
pour le chassis :
"A la fin de ce module les participants auront produit une base capable de se déplacer sur un sol plat | accidenté | en extérieur pendant une heure sans recharge"
pour la vision :
"A la fin de ce module les participants auront produit une option de pour la base ci-dessus capable de reconnaître des formes | des couleurs et d'informer la base de l'environnement"
pour une pince :
"A la fin de ce module les participants auront produit une pince pour la base ci dessus capable de saisir un objet (poids, volume)" l'option vision sera une condition de bon fonctionnement ou la vision n'est pas une obligation.
la station de rechargement :
"A la fin de ce module les participants auront produit une station de rechargement pour la base ci-dessus capable d'indiquer sa position par IR"
Je suis très scolaire.
Pour moi si nous ne sommes pas tous sur la même vision d'un rendu final, il y aura divergence en milieu de parcours voir incompréhension et le pire grogne et aigreur de certaine personnes qui se sentirons évincée après des ANNEES et des ANNEES de participations.
Nous avons abordé le prix de départ (100) mais avez vous un volume pour la machine.
Moi je suis en déplacement, glisser le châssis dans mon sac serait génial avec moins d'un kilo et le volume d'un dictionnaire pourrait correspondre.
Pour finir, dans le dernier MagPi, il y a un article pour une alimentation d'une RPi
Gyro49
#77146 Pablo odysseus, robot artist Land Art
Posté par
sur 13 décembre 2016 - 09:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Sinon pour la détection d'obstacle je vais essayer ça
https://www.element1...ng-on-logi-bone
C'est moins gourmand
#79301 Robot Quadrupède intelligent.
Posté par
sur 16 février 2017 - 12:29
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je viens d'avoir l'information qu'un enfant à perdu un oeil avec un joué de fête foraine suite à un tir dans un miroir qui lui a donc renvoyé le faisceau.
Sinon, génial idée
#67593 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 27 février 2016 - 05:25
dans
Machines de fabrication
Bonjour,
Je suis de retour avec ma CNC entièrement bricolage maison
Donc pour 150 euros:
1 raspberry (35 euros)
1 Atmega 328p avec son quartz 16MHz et ses deux condensateur (5 euros)
3 moteurs pas-à-pas (3x15euros)
3 Contrôleurs de Moteur Pas-à-Pas EasyDriver (3x10 euros)
1 alimentation 12 v (récup sinon 15 euros sur amazon)
Tube acier diamètre 20 mm de chez brico dépot 4x1.00
Tige filleté de 8 mm de chez brico dépot 2x0.80euro
Tige filleté de 6 mm de chez brico dépot 1x0.80euro
équerre alu (pour les chariots de déplacement) bricot dépot
Roulement à bille de Roller de chez Décathlon
les chevilles laiton et les entretoise sont de leroy merlin
Sinon le bois c'est de la récup.
Les ressorts récup garagiste
option:
-un boitier CPL 15 à 20 euros permet d'envoyer par réseau de mon buerau à l'autre bout du sous-sol les GCode à réaliser.
Ci-dessous la CNC et son boitier gris de controle
Ci-dessous la tige filletée (8mm) de déplacement et écrou allongé (entretoise) et son ressort pour limiter les jeux et l'écrou papillon

Ci dessous l'un des deux rails de dépaclement par axe la tige filletée de 6mm sert à faire la tension sur les roulements

Pour finir mon boitier de contrôle
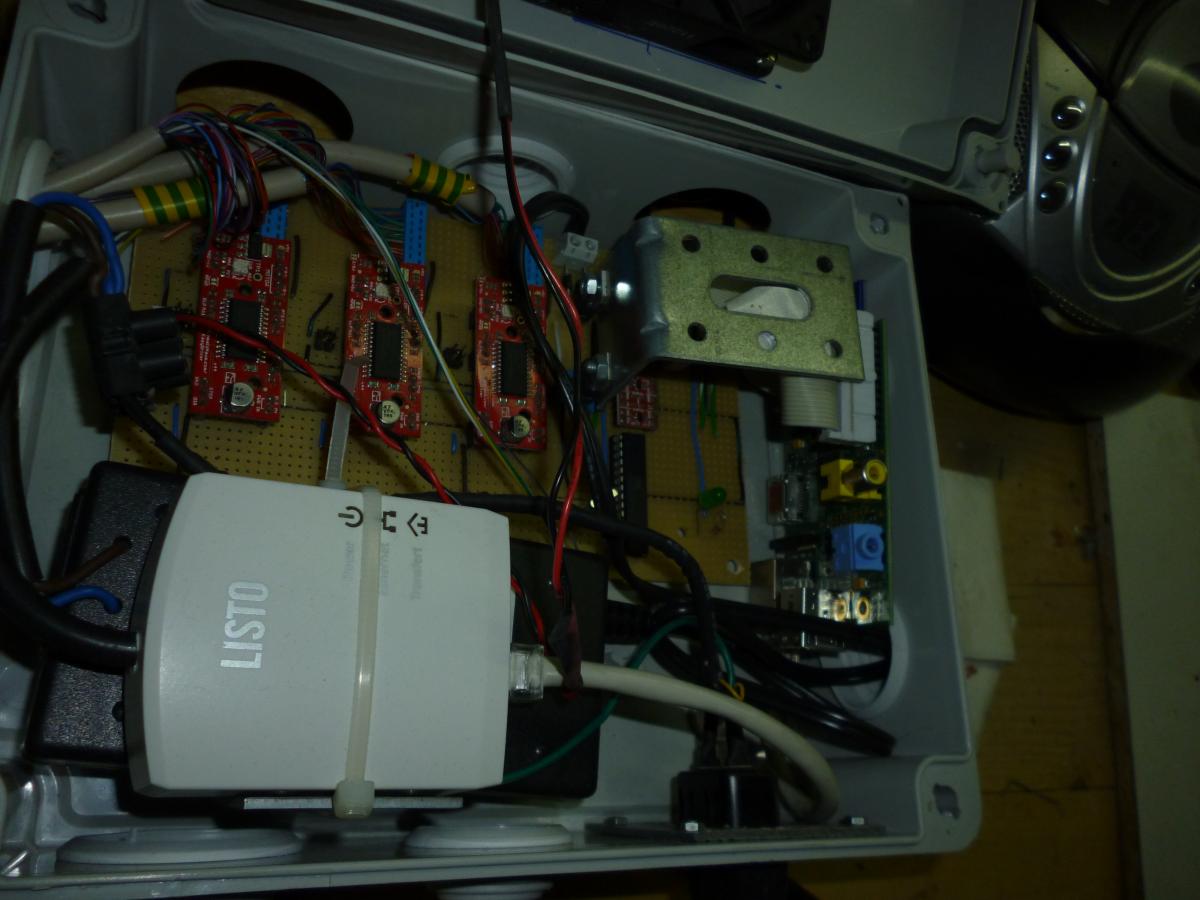
Donc la raspberry pousse dans l'atmega ligne après ligne du gcode via la connexion RX / TX
pour le script python le lien
Pour l'Atmega j'ai suivi cette méthode
Bon c'est vrai je suis plus vers les 170 euros.
A bientôt
#67605 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 27 février 2016 - 07:43
dans
Machines de fabrication
Oups j'ai bien une photo global que j'ai oubliè

#67725 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 04 mars 2016 - 12:24
dans
Machines de fabrication
En effet les connecteurs ne sont pas fait pour ça, mais il supportent bien la charge.
J'ai un peu triché, comme c'est des DB25, j'utilise une paire pour un signal, doncpour les 6 fils du moteur j'utilise 12 fils du cable imprimante.
Pour la question du jeu, je n'ai rien remarqué, maintenant l'utilisation c'est :
-gravure de PCB
-usinage de PVC, il faut être patient et ne pas trop en demander à chaque passe.
J'ai l'intention de ma faire une imprimante 3D, donc je vais commander de plus gros moteurs pour la CNC et échange avec la 3D
A y refaire, je mettrais mes controleurs plus près des moteurs.
#67472 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 23 février 2016 - 12:03
dans
Machines de fabrication
Bonjour
Pour une CNC laser j'avais ça en stock
Si tu veux j'ai fait une CNC format légèrement inférieur au A3 pour 150 euros.
Les photos ce week end.
Pour la fixation des moteurs sur les tiges filletées voir le post
Cordialement
#67722 Réalisation d'une base mécanique pour CNC : quelques questions préléminaires
Posté par
sur 04 mars 2016 - 09:25
dans
Machines de fabrication
#54173 [CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Posté par
sur 09 mars 2013 - 11:18
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai une arduino et une raspberry, c'est deux choses différentes.
Je suis mauvais dans les deux cartes, mais je me soigne à coup de Doliprane
 /> et de recherche sur le net.
/> et de recherche sur le net.La Raspberry est très récente. Les tutos et les retours d'expérience sont en constante augmentation et si tu regardes bien tu trouves.
Mon projet n°2 sera de controler mon robot via un raspberry avec ou sans arduino avecun dongle wifi. C'est toujours moins dur pour mon porte monnaie que deux modules XBee.
Il y a une revue, je dirais, en Anglais traduit -> the MagPi
En ce qui concerne le prix, sur Kubii c'est 37.99+8.75 de port
Je l'ai acheté là avec un boitier et la livraison une semaine après.
La carte SD 16Go à SuperU -> génial Pour XBNC (média center)
J'attaque l'OpenCV Sous Raspbian -> re-Doliprane
 />
/> Est ce que Robot-Maker serait dans la capacité de récupérer des code de promotion ?
 />
/> Gyro49
#54114 [CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Posté par
sur 08 mars 2013 - 01:51
dans
Robots roulants, chars à chenilles et autres machines sur roues
#54789 [CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Posté par
sur 26 mars 2013 - 04:29
dans
Robots roulants, chars à chenilles et autres machines sur roues
En faisant l'inverse, les poulies au centre des bras ?
Gyro49
#54680 [CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Posté par
sur 23 mars 2013 - 04:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Le câble n'est pas nécessaire si tu dispose d'une image (img) déjà compilée.
Je vais regarder sur ma carte si je peux le faire.
@+
#54353 [CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Posté par
sur 15 mars 2013 - 01:38
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai pensé à toi en regardant la 3ème vidéo de la page ci-après
http://www.numerama.com/magazine/17351-kinect-deja-des-hacks-prometteurs-maj.html
Gyro49
#54311 [CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Posté par
sur 13 mars 2013 - 04:51
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai trouver une autre solution: la communication par Android mais encore une fois je ne sais pas comment m'y prendre...
Quelqu'un peut m'aider ?
Merci a vous/>
Cdt GeekMaxou
Bonsoir,
J'aime bien être lourd.
Le wifi pourrait être bon mais avec une connexion Ad Hoc ce qui permet de faire du wifi sans base.
Je n'ai pas essayer mais dès que je peux...
Gyro49
#54337 [CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Posté par
sur 14 mars 2013 - 12:47
dans
Robots roulants, chars à chenilles et autres machines sur roues
Moi je pense avoir compris ^^ Et je trouve moi aussi dommage de pas réussir à lire cet article qui semble fort intéressant ! ^^ ...
/>
Bonjour,
Mon ami n'arrive pas à mettre la pièce jointe dans un message privé.
Est ce qu'il y aurait une solution discrète ?
Gyro49
#54798 [CHAR]Autonomous Robotics Mechanics Intelligent (A.R.M.I)
Posté par
sur 26 mars 2013 - 07:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
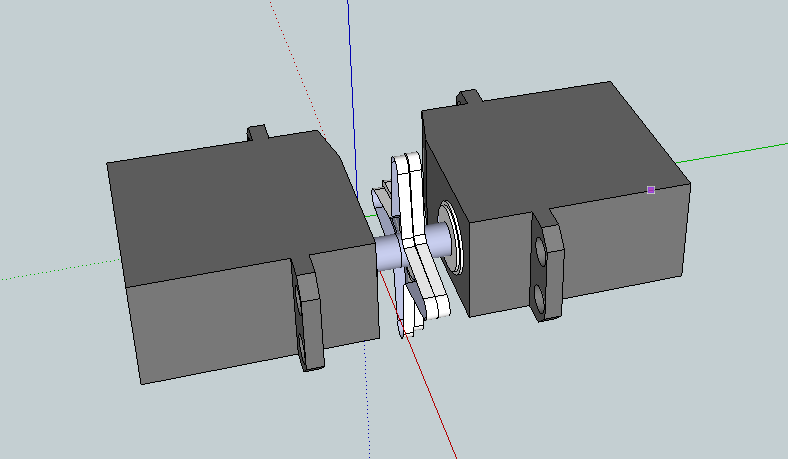
La présentation Sketchup me fait penser à quelque chose
En ce qui concerne les poulies à coeur du bras, j'imaginais les moteurs vers l'extérieur et les axes vers le coeur.
Maintenant ce n'est pas forcément réalisable.
Gyro49