Comme ça j'ai envie de dire qu'un 2x25 pourrait être suffisant car le 25 dans 2x25, c'est pour 25A or tu me parles de 16.6A < 25 A ... Donc ça doit passer.
Mais si tu veux être absolument sûr et que tu as envie de t'équiper, tu peux te prendre une alim de labo qui tient genre 20A (voir 30A si tu veux être super large) et alimenter ton moteur avec, tu pourras ainsi voir comment se comporte la consommation de ton moteur en courant avec et sans charge.
( Après j'ai parlé d'alim de labo, c'est pour du confort et si tu as une utilité pour la suite sinon juste une multimètre en mode ampère mètre suffit pour ce genre de mesure )
Si 25A ça suffit, j'ai remarqué sur la doc de la carte kangaroo qu' est aussi compatible avec la SYREN25 et qui est moins chère que la sabertooth 2X25 ( car la syren est faite que pour 1 moteur et toi tu n'en as qu'un alors que la sabertooth est faite pour 2 moteurs ... )
Pour ce qui est de la valeur du potentiomètre je ne pense pas que ça soit très important, il va faire un pont diviseur, je pense que tu seras très bien avec un potentiomètre entre 1K et 100K ohm...

Embrayage piloté
#21

-

- Administrateur
-

- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 19 janvier 2023 - 07:29
- Forthman et Grooche aiment ceci
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#22
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 19 janvier 2023 - 11:19
Bonjour Mike,
je te remercie ''encore une fois'' pour tes informations !!! Qui me sont très précieuse..
Pour l'alimentation de labo je vais peut-être attendre un peu... J'ai une personne qui répare un peu de tout en électronique à coté de chez moi ! Je vais lui demandé si je peu lui empreinter son alim de labo. Suivant comment ce passe mon projet et si ca fonctionne comme je veux, je m'achète une alim de labo 
Je me permets de te demander si sur une carte sabertooth 2x25 ou 2x 32 qui normalement est faite pour commander 2 moteurs, il y a possibilité de connecter 2 commandes (gâchette)?
Les 2 commandes seraient sur la même carte et aurai à commander un seul et même moteur.
Sachant que les gâchettes ne seront pas actionnée en même temps, mais une à la fois.
J'aimerai quand même savoir si par mégarde les 2 commandes (gâchette) sont actionnées en même cela emmènera la carte au paradis des cartes???
Avec un grand merci pour le temps que tu m'alloues C'est très sympa !!
Eric
#23
-
- Administrateur
-
- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 20 janvier 2023 - 08:26
Hum je ne suis pas sûr de bien comprendre ...
Pourquoi vouloir mettre deux gâchettes pour piloter un moteur, quand une seule gâchette permettrait déjà de piloter ton moteur ?
Pourquoi vouloir prendre une 2x pour un seul moteur ? Alors que les syren sont moins chères pour 1 seul moteur ?
Pour pouvoir bien répondre à tes questions il est recommandé de donner le maximum de détails sur ce que tu veux faire, le comment, mais aussi et surtout le pourquoi / l'objectif, car sinon on peut répondre à tes questions pour te laisser avancer sur le chemin que tu prends sans te dire que c'est pas le bon chemin car on ne sait pas où tu veux aller ...
Maintenant en utilisant ma boule de cristal, je suppose que tu veux utiliser une gâchette pour piloter ton moteur dans un sens, et une autre pour le piloter dans l'autre sens.
Si c'est bien le cas alors c'est possible et ça peut se faire avec deux gâchette une kangaroo et une carte syren. ( Pas besoin de carte pour 2 moteurs ) .
Il suffit juste de relier les gâchettes ensemble de sorte à faire un point diviseur de tension avec deux résistances variables chacune étant une des gâchettes. Et dans ce cas tu peux aussi appuyer sur les deux en même temps et dans ce cas le moteur va aller "un peu" du côté où tu appuis le plus ... Et plus tu appuis d'avantage d'un côté que de l'autre plus il ira de ce côté ...
Si jamais j'ai mal compris ce que tu voulais faire n'hésite pas à donner plus de détails.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#25
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 20 janvier 2023 - 10:31
Bonjour à tous,
Merci pour les informations !
En me relisant, je me rends compte que mes ( questions, explication) manque de détails.
Mon projet est de fabriquer un appareil qui puisse piloter un embrayage.
Pour cela, j'ai en ma possession un moteur: cc--12v--165w--16.6Amp--3000rpm
Sur ce moteur est flasqué un réducteur.
En sortie du réducteur, j'ai une roue en métal solidaire de celui-ci.
La roue en métal a pour but d'enrouler sur elle même une chaine (style chaine de vélo).
La chaine de vélo est reliée à un câble via (un serre câble)
Le câble à pour but de tirer sur la pédale d'embrayage et ainsi remplacer (une jambe  ).
).
Pour cela:
J'ai besoin d'asservir le moteur pour qu'il puisse faire tourner la roue en métal, et donc tirer sur la pédale d'embrayage.
La roue en métal devra tourner de 270° environ pour la course maximal du câble ( via la chaine)
270° me donne une course de 140mm environ, mais il faut que l'action de la ou les gâchette(s) reproduise la dextérité d'une jambe humaine. Avec tous ce que cela implique (point de patinage au premier tiers, stagnation, vitesse de réaction...)
Je souhaite que la commande de l'asservissement du moteur se fasse avec une ou deux gâchette(s) filaire de style accélérateur au guidon de trottinette .( je ne sais pas si, j'utilise les bons terme)
Le moteur devra tourner de x tours pour permettre à la roue en métal de parcourir ses 270°.
La roue en métal devra retourner à sa position de repos 0° automatiquement quand la ou les gâchette(s) ne sont plus actionné(es).
La roue en métal va devoir être actionnée dans le sens horaire et anti-horaire, avec le moteur via l'asservissement car le réducteur empêchera sont autonomie pour son retour au repos.
La ou les gâchette(s) seront actionner de : exemple 10° sens horaire pour que cela fasse tourner de 30° sens horaire la roue en métal, mais dès que je relâche la gâchette de 5° la roue devra faire 15° dans le sens anti horaire.
Mon souhait serai de pouvoir commander le moteur avec deux gâchettes, une à la fois ( pour faciliter l'ergonomie) style auto école comme le dit Forthman.
J'espère que mes explications ne sont pas trop indigeste 
Mike, si je ne dits pas de bêtises, il serai possible de commander la carte syren avec deux gâchettes et des pontages sur celles-ci ??
Merci beaucoup pour le coup de main et surtout la patience...
Cordialement
Eric
- Forthman aime ceci
#26
-
- Administrateur
-
- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 21 janvier 2023 - 02:30
Ok, donc en effet j'avais pas compris le besoin.
Précisons donc encore un peu.
Le module kangaroo est conçu pour entre autre être piloté via un signal analogique.
Pour ce faire quand on a une seule gachette on la branche en mode potentiomètre et on obtient une variation à peu près proportionnelle entre notre gachette et notre signal analogique.
Si on veut être en style auto école il faut réussir à faire en sorte de câbler nos deux gachettes de sorte à ce qu'on appuis sur l'une ou l'autre notre signal puisse varier de 0 à 5V.
Dans le cas où nos deux gachettes sont comme des joysticks qui peuvent aller dans les deux directions et qui au neutre sont au point centrale,
Une façon de le faire serait de brancher les 2 gachettes en parallèle ... mais ça va un peu influencer la linéarité du contrôle ...
Sans rentrer dans le détail du calcul voici le résultat de la différence de linéarité :
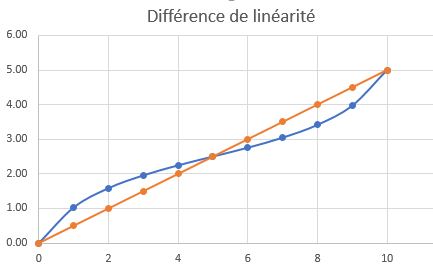
En Rouge le comportement linéaire avec une seule gachette de branchée
En Bleu tu appuis sur ta gachette exactement comme sur la courbe rouge mais tu as une deuxième gachette de branchée qui est en position " centrale ".
En gros la position centrale et les positions extrêmes seront bien les mêmes ...Mais tu auras pas exactement le même niveau de sensibilité partout ...
C'est peut être pas un problème pour ton besoin ...
Par contre si c'est une gachette qui au repos est à une extrémité et quand on appuis on peut aller à l'autre extrémité alors là le fait de mettre les gachettes en parallèle ça ne marche pas ... Et malheureusement maintenant que j'y pense au vu du besoin c'est plus vers ce genre de chose que tu souhaites aller ...
Dans ce cas un câblage "malin" est un peu plus difficilement envisageable mais il reste la solution de mettre une arduino entre les gachettes et le module kangaroo ...
mais tout l'avantage du module kangaroo était de se passer d'un arduino et de faire du code ...
Dans ce cas autant prendre un driver de moteur plus classique suffisament puissant, un arduino et de faire le code qui va bien ... suffira de brancher le potentiomètre et les deux gachettes à l'arduino ... En plus les composants seront un peu moins chers ...
- Forthman aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#27
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 22 janvier 2023 - 10:54
Bonjour Mike,
Punaise que de connaissances!!!
Merci pour les informations...
Bon, je suis passé à l'acte, et j'ai commandé le nécessaire pour asservir le moteur.
Je vais resté avec une gâchette, pour commencé!! Cela fonctionnera et me permettra de me familiariser avec l'électronique et mon montage.
Je n'ai pas envi de passer sur Arduino,( pas pour l'instant)
Il ne faut pas être plus royaliste que le roi
J'ai commandé:
-1 module Kangaroo x2
-1 carte Syren 25A
-1 potentiomètre 4w 10kohm
-1 gâchette analogique (accélérateur trottinette)
-1 assortiment de fil de couleur
-Gaine thermo
-Gaine tressée
J'aurais surement encore besoin de vos lumières !!
Je vous tiens au courant de l'évolution du chantier:-)
Très bon Dimanche
Merci encore !!
Eric
#28
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 21 mars 2023 - 07:06
Je reviens après une petite pause sur mon projet.
Que le temps passe vite.😭..
J'ai réalisé un montage avec le matériel.
Bon... J'ai étudié la marche à suivre pour la configuration de la carte syren 25 et la carte kangaroo x2.
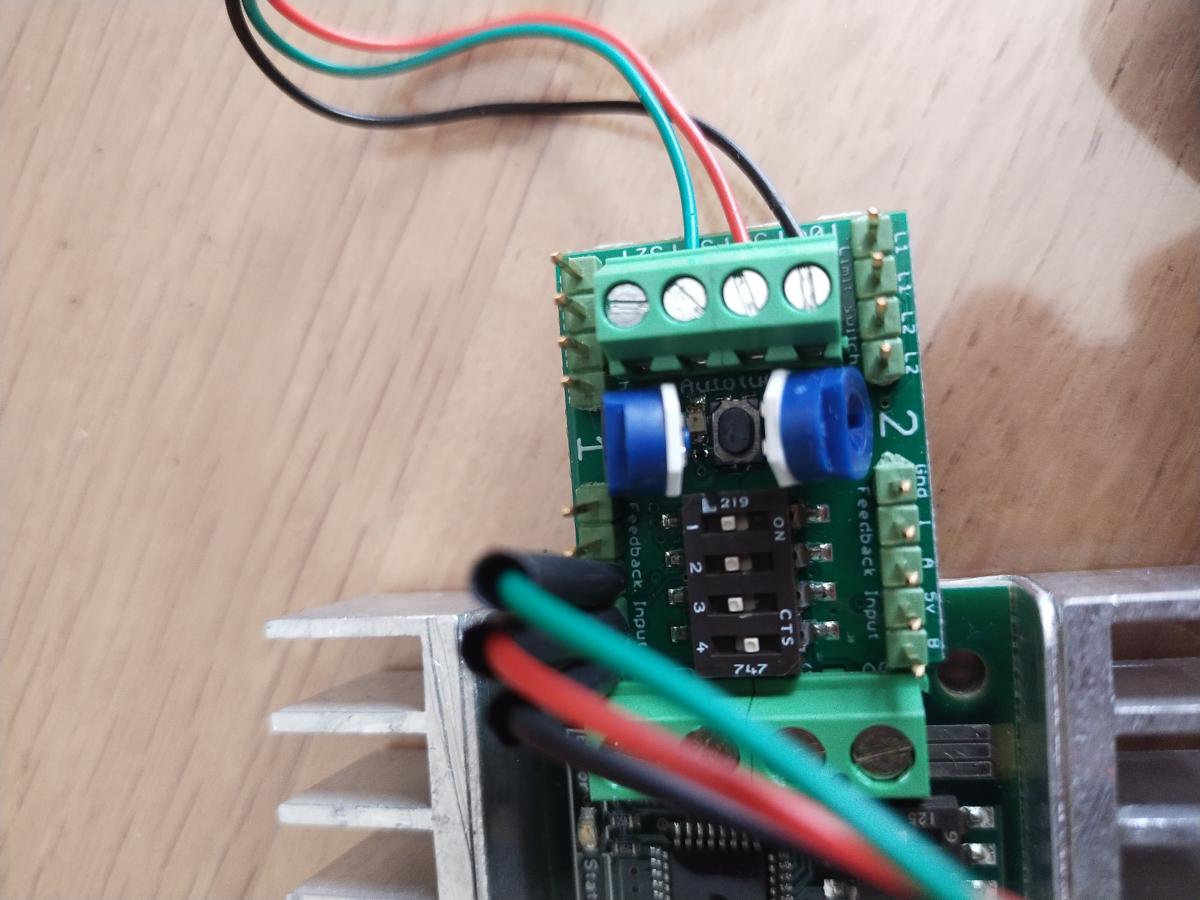
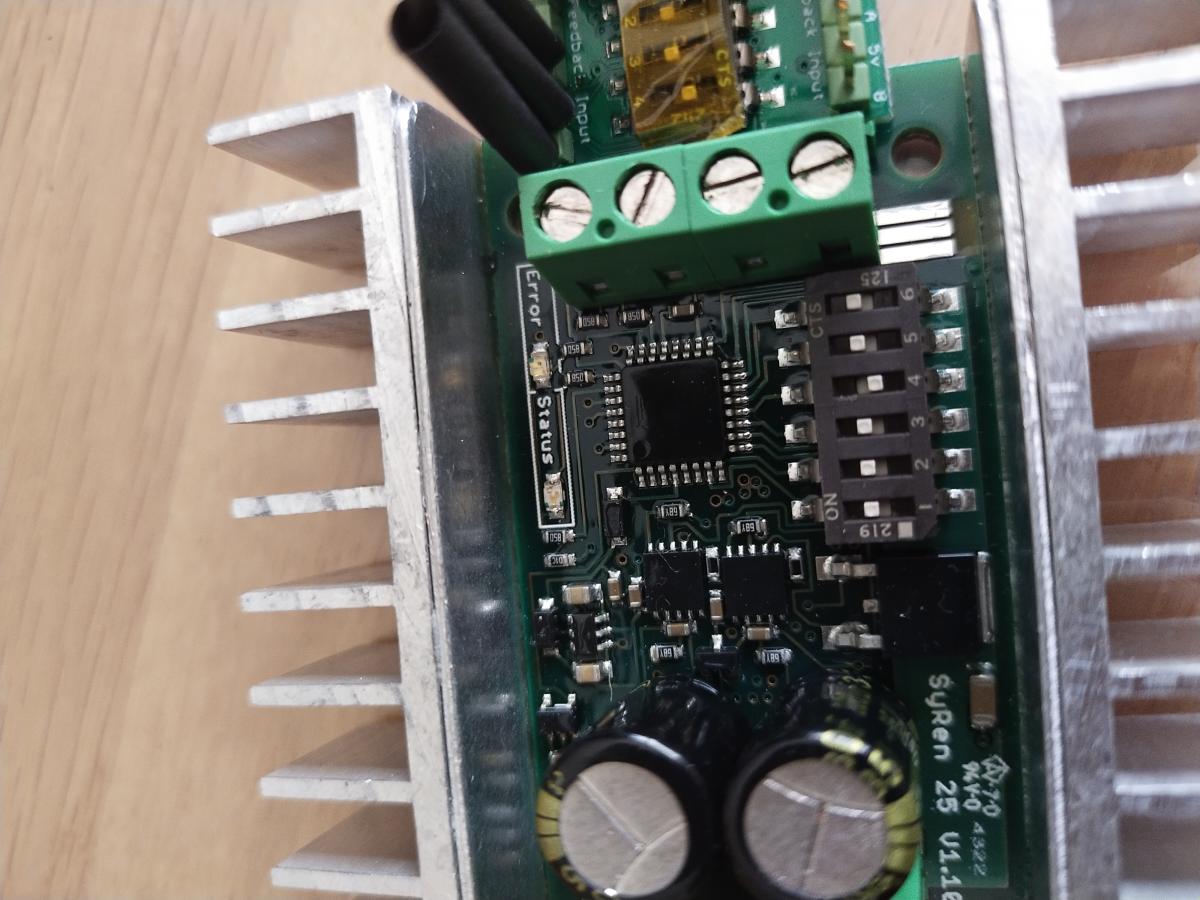
Je vous ai mis quelques photos du montage.
Quand j'alimente le montage,le moteur tourne en continu.
J'ai essayé de (trouver) pourquoi,il est alimenté!
Mais rien n'y fait,il ne veut pas s'arrêter de tourner 😁..
J'ai relevé le voltage que j'ai au niveau de la commande (gâchette)=0.9v au repos et 3,9 en fin de course de la gâchette.
Si vous pouviez regarder les photos du montage et me dire ou j'ai fait une bêtise...
Encore merci à tous 👍👍
Bonne soirée
Eric

#30
-
- Administrateur
-
- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 21 mars 2023 - 10:45
Afin de mieux t'aider,
=> Indique ce que tu veux faire
=> Ce que tu as configuré en expliquant pourquoi tu l'as configuré ainsi ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#31
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 22 mars 2023 - 10:31
Bonjour Mike,
Et merci de me donner de ton temps .
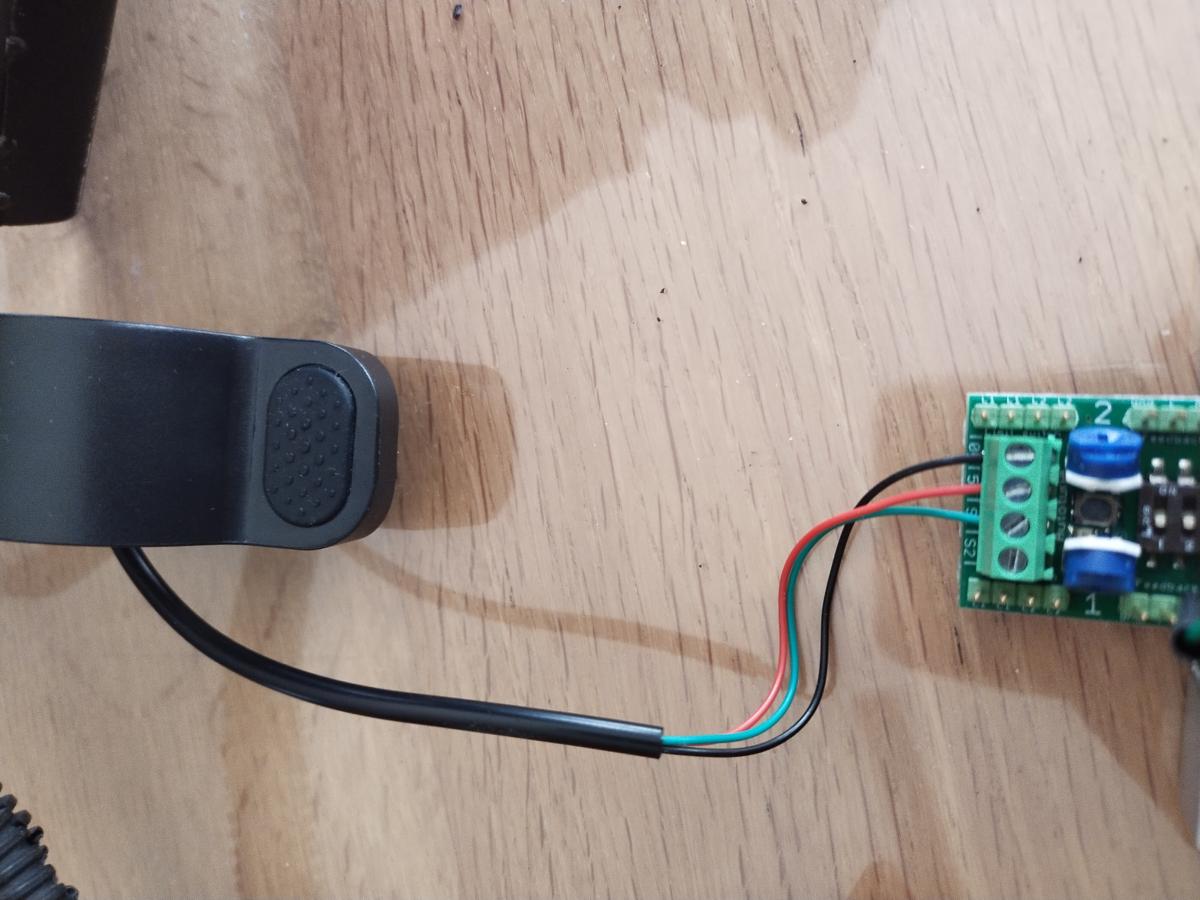
Mon souhait est de pouvoir commander mon moteur avec la gâchette qui se trouve sur la photo.(accélérateur trottinette électrique)
Je souhaite que l'action sur la gâchette commande mon moteur sur environ 270°
Gâchette au repos =0°moteur
Gâchette au maximum de sa course = 270° moteur env
Jai connecté la gâchette sur le 5v et le B de la carte Kangaroo x2, le signal analogique de la gâchette est branché sur S1.
Switch carte kangaroo =
1 = off car mon signal analogique est branché sur S1
2= off car j'ai un signal analogique de 0 à 5v
3= on car la position du moteur est contrôlé par le signal d'entrée
4= on car s1 controle le moteur 1 et s2 control le moteur 2.
Sur la carte SyRen25
Tous les switchs son sur ON sauf le numéro 4 car j'ai une entrée analogique 0--5v connecté à la borne s1..
Je ne vous cacherai pas que j'ai traduis les modes d'emploi des 2 cartes et c'est pas simple, simple  :-)...
:-)...
Dès que je mets le montage sous tension le moteur tourne en continue donc impossible de configurer la carte kangaroo.
J'espère avoir été assez clair.
En vous remerciant
Eric
#32
-
- Administrateur
-
- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 23 mars 2023 - 11:48
Switch carte kangaroo =
1 = off car mon signal analogique est branché sur S1
2= off car j'ai un signal analogique de 0 à 5v
3= on car la position du moteur est contrôlé par le signal d'entrée
4= on car s1 controle le moteur 1 et s2 control le moteur 2.
ça ça me paraît ok
Sur la carte SyRen25
Tous les switchs son sur ON sauf le numéro 4 car j'ai une entrée analogique 0--5v connecté à la borne s1..
ça ça ne me paraît pas ok ...
Tu as pas une entrée analogique sur ta carte syren tu as un module kangaroo ...
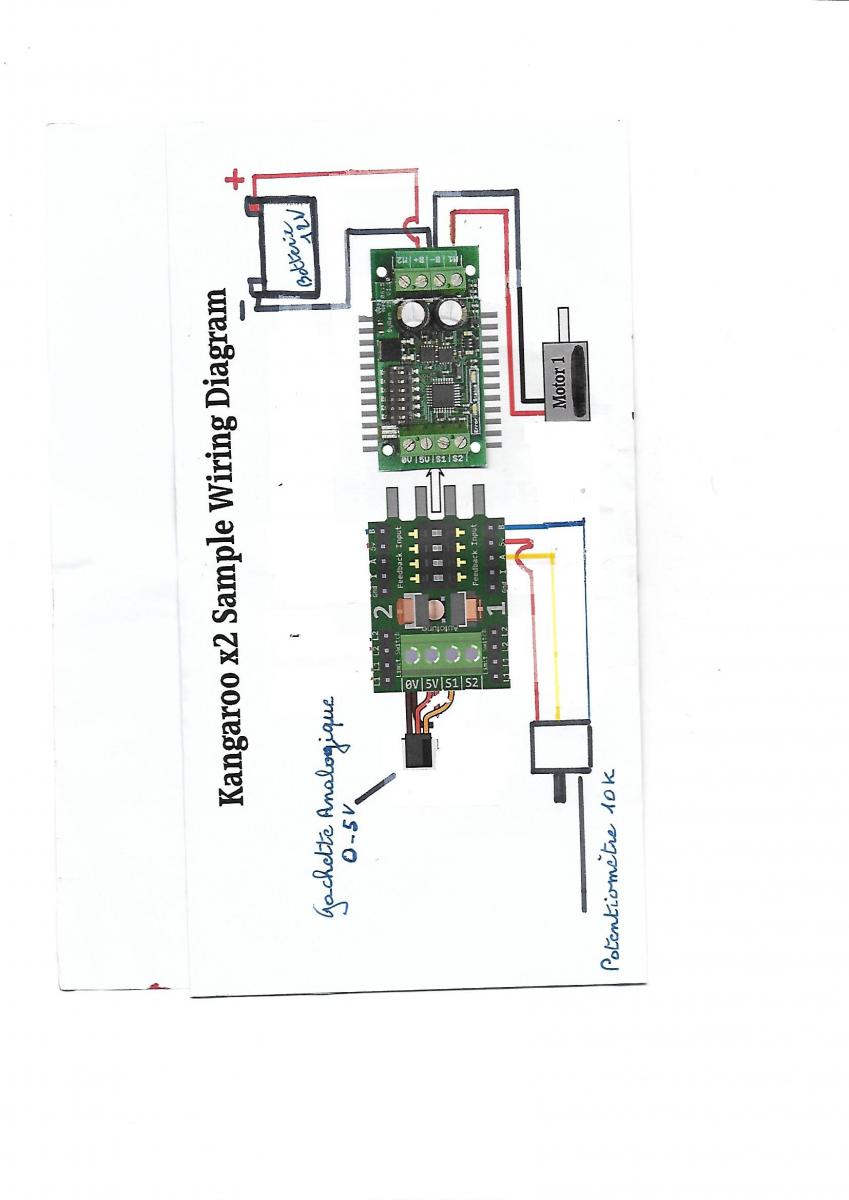
Je t'invite à repartir de la page 21 de la doc du module kangaroo : https://www.dimensionengineering.com/datasheets/KangarooManual.pdf
Il y a cette image :

Dans ton cas tu as un seul moteur à mettre sur le côté S1 ... Mais le plus important à voir c'est le réglage des jumpers sur la carte driver de moteur ... c'est pas ce que toi tu as fait ...
Je te laisse creuser un peu plus... et reviens vers nous si tu as encore des soucis  Ps : dès que ton système marche n'hésite pas à me laisser un petit avis google
Ps : dès que ton système marche n'hésite pas à me laisser un petit avis google 
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#33
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 01 avril 2023 - 02:18
 -
- ....
....Image(s) jointe(s)
#34
-
- Administrateur
-
- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 02 avril 2023 - 12:09
Ton moteur doit être mis sur M1 et M2 ! pas sur M1 et B- !
Par contre pour les switch sur la SIREN pour moi ça aurait été l'inverse : ON ON OFF OFF OFF OFF ...
Je sens qu'on se rapproche de la configuration finale
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#35
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 02 avril 2023 - 12:36
Merci beaucoup pour les infos 🙏🙏
Les mots me manquent pour te remercier de ton investissement dans mon projet 👍👍👍....
Je te tiens au courant !
Très bonne journée
Merci encore
Eric
- Mk1 aime ceci
#36
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 03 avril 2023 - 05:00
Bonjour Mike,
Je me permet de revenir vers toi au sujet de mon projet !!
J'ai vraiment l'impression d'être une chèvre  ....
.... 
Alors voila.....
j'ai fait le montage en suivant tes consignes.
J'ai besoin de lumière pour la configuration du matériel...
Est ce que je dois débrancher le moteur l'ors de la programmation de la carte kangaroo ?
Puis
1 Appuyer une impulsion sur autotune
2 Appuyer une 2eme fois sur autotune
3 Faire faire le cycle au potentiomètre. Sachant qu'il est sur la sortie du réducteur je triche en tournant le corp du potentiomètre .
Je démarre l'initialisation en mettant le potentiomètre à mi-course puis fin de course de chaque cotés puis retour au centre.!
Est-ce bon ?
Merci d'avance
J'aurais surement besoin ----encore--- de tes lumières
Très très cordialement.
Eric
#37
-
- Administrateur
-
- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 03 avril 2023 - 10:46
ça remonte à loin la dernière fois que j'ai utilisé un module kangaroo et je n'ai pas relu la documentation ... Mais le but de l'autotune, c'est d'avoir le moteur de branché avec le potentiomètre " de mesure de position " de fixé sur la sortie du moteur ... Pendant l'auto tune le moteur tourne et c'est lui qui doit bouger le potentiomètre ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#39
-
- Membres
- 46 messages
Membre
- Gender:Male
- Location:29 Morlaix
Posté 08 avril 2023 - 09:20
Bonjour à tous,
Bon ben mon projet fonctionne !!!
Pour l'instant sur la table à mangé  , mais c'est déjà un grand début !
, mais c'est déjà un grand début !
Un grand merci à toi Mike pour le temps que tu m'alloue et surtout ta patience .
Il me ,reste à affiner la commande!
Je souhaiterai savoir ce que vous en pensé!!
Je commande la carte Kangaroo x2 avec une gâchette accélérateur trotinette 0-5v
Quand je mesure le courant de sortie de la gâchette, j'ai quasiment 1v au repos et 3v au maximum de la course!
Y a t'il un composant qui permettrait d'avoir vraiment 0v au repos et 5 v avec la course au maximum. Un composant pas trop volumineux.
Merci ,d'avance
Eric
- Forthman aime ceci
#40
-

- Modérateur
-
- 1â¯261 messages
Pilier du forum
- Gender:Male
Posté 08 avril 2023 - 10:12
Bonsoir,
tu veux dire que quand tu mesures la TENSION de sortie de la gachette, tu obtiens des valeurs entre 1V (au repos) et 3V (au max)?
Je trouve ça un peu étrange. Est-ce que tu as une documentation (ou au moins un lien) vers ta gachette? Et est-ce que tu peux vérifier qu'entre les pins0V et V auxquels tu branche la gachette, tu as bien 5V (car si la gachette est alimentée en moins de 5V, alors c'est normal qu'elle ne donne pas 5V en sortie.
Sinon, si le seul but est de transformer un signal 1-3V en signal 0-5V (et que tu dispose d'une tension 5V), ça peut se faire avec un petit montage à base d'un amplificateur opérationnel et de quelques résistances. Par contre, ça implique de faire de la soudure. Est-ce une solution envisageable pour toi ou pas? (vu l'heure, je ne vais pas faire les calculs nécessaires ce soir, surtout sans savoir si tu te sens de faire les soudures)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




