Je cherche un moyen pour que Ash apprenne tout seul à se tenir debout.
Pour le fun. 
Je veux parler d'une méthode pour établir finement les constantes PID.
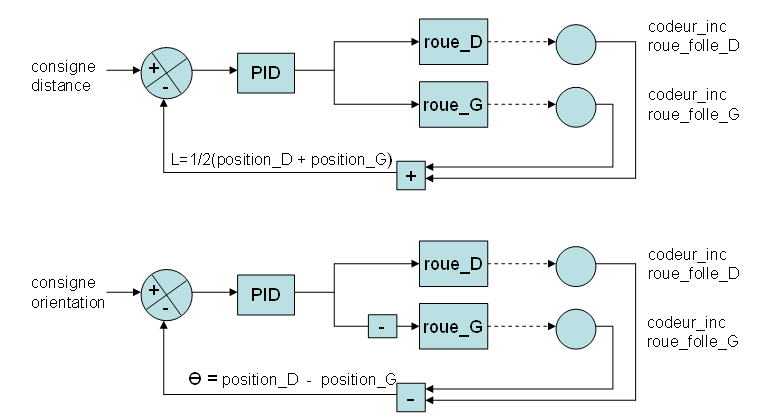
Je laisse temporairement de coté les 2 autres asservissements (polaire et distance) pour lesquels c'est moins compliqué. Moins compliqué si je ne tiens pas compte de l'oscillation et que je les gère dans un premier temps uniquement avec le P.
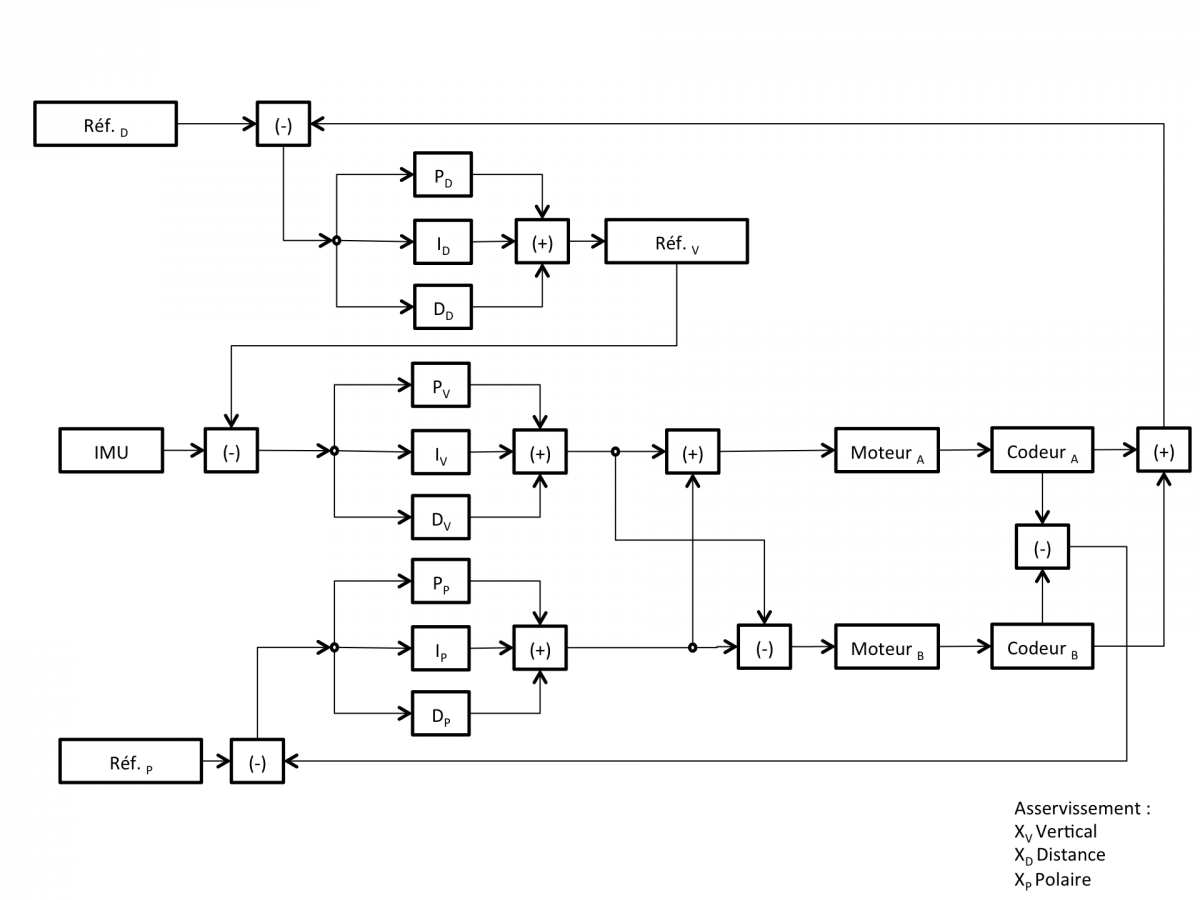
Je me concentre sur les 3 constantes PID de l'asservissement vertical.
En entrée : l'inclinaison par rapport à la verticale.
En sortie : une vitesse et une direction.
Au milieu, un calcul PID avec les 3 constantes tournant sur un raspberry.
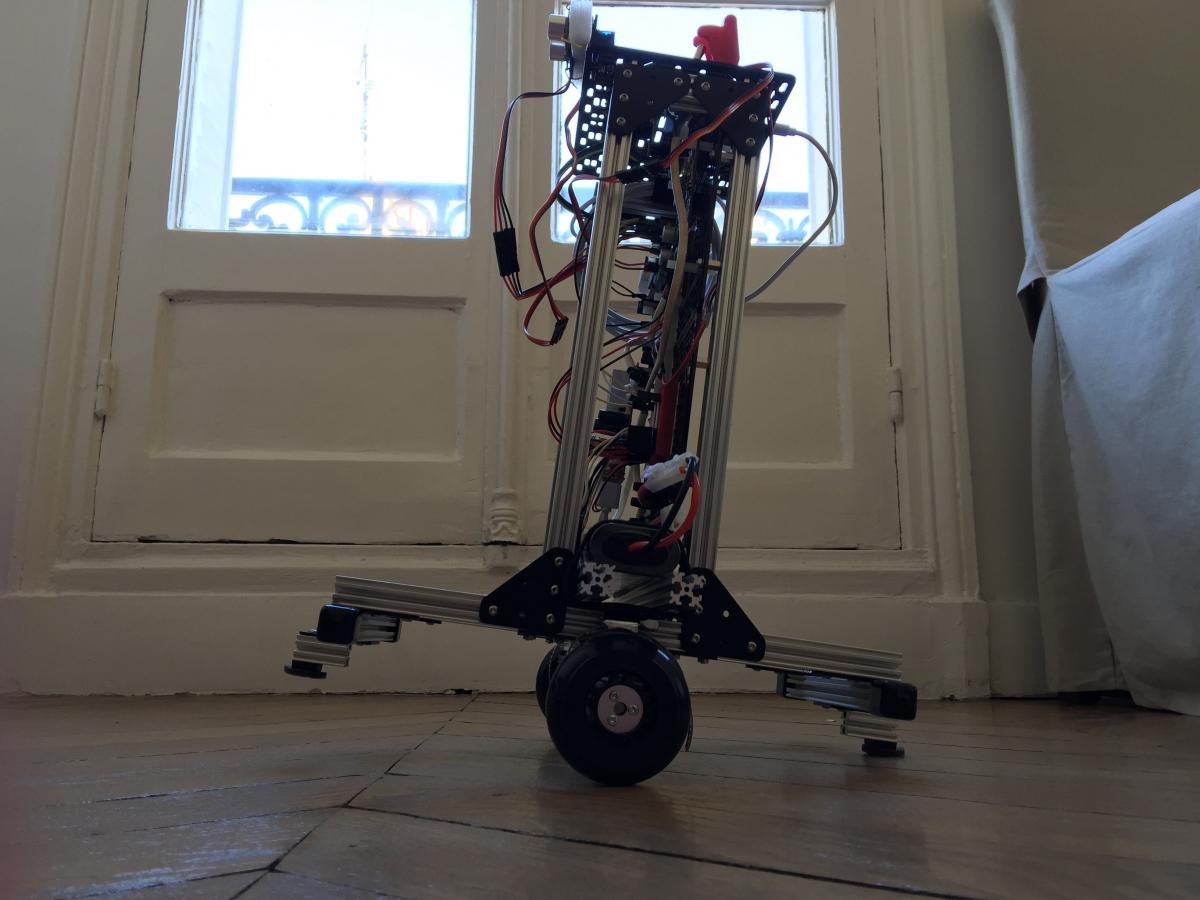
Le robot est construit pour se poser sur ses pieds au repos avec une certaine inclinaison. Ces pieds limitent aussi les trop fortes inclinaisons pour l'empêcher de tomber.
Il a aussi un taux élevé d'échantillonnage du capteur inertiel pour son Kalman interne et pour choper les extrémités de l'amplitude.
En mode apprentissage,
Ash pourrait surveiller son amplitude d'inclinaison. Il oscille d'avant en arrière en permanence, même faiblement. Il lui suffirait de mémoriser l'angle fait entre l'inclinaison avant et l'inclinaison arrière à chaque aller-retour.
Il pourrait décider qu'une combinaison PID est meilleure qu'une précédente en constatant une amplitude plus faible.
Pour l'aider dans sa tâche, je pourrait commencer avec des valeurs PID connues mais non optimisées.
Pour déterminer les 3 constantes :
- Pourquoi pas asservir le calcul du PID avec l'amplitude constatée ... Je trouve cela compliqué (ou je ne vois pas de moyen simple).
- Je peux aussi programmer ce que je fais manuellement : d'abord P, puis D, puis re P, puis I. C'est de la fainéantise de programmeur et cela dépend encore de mon algo de détermination.
- Je peux aussi faire dans le brutal et l'aléatoire pur.
La fin de l'apprentissage, est donné par une amplitude inférieure à X degrés. (X très faible à définir).
Le plus intelligent me semble encore la méthode du PID par l'amplitude cette fois. Mais je me sens bête là.
Faute d'idée alternative, je vais me rabattre sur la fainéantise mais je n'aurait pas forcement le meilleur triplet au final.
Cette méthode d'auto-apprentissage porte peut-être un nom, cela m'aiderai à googler le truc.