Bonjour,
je dois réaliser un asservissement d'un bras robotique.
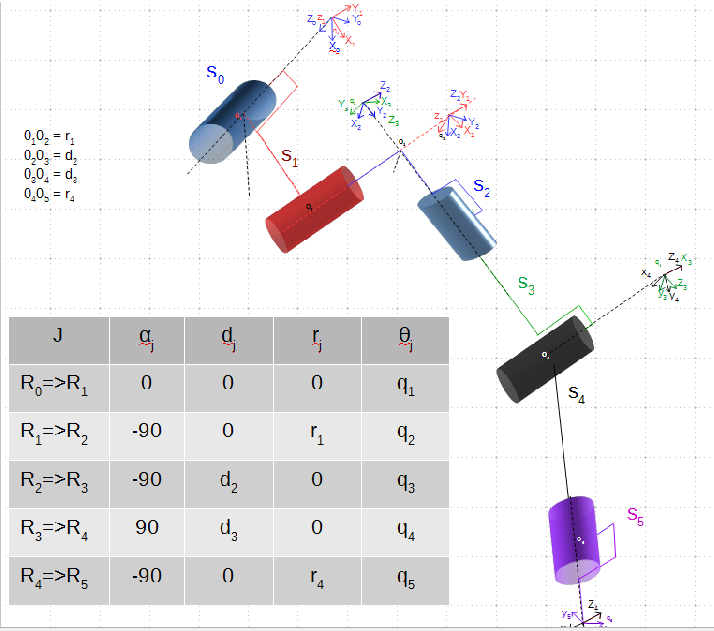
J'ai donc
modéliser aveccoeff davenit
Déterminer le MGD
Et je tente d'uinverser le MGD afin de trouver le MGI par la méthode de Paul
cependant je me demande si cette méthode est possible dans mon cas :
En effet Quand je calcule T10 U = T12T23T34
Dans le terme de droite la composante (4eme colonne 3eme ligne) n'est pas nulle (du aux composants de davenit r et d )
Ce qui ne permet pas d'obtenir une équation suimple du type pxS1+pyC1=0
Est ce parce que quand dans le modèle de davenit di et ri ne sont pas nul la méthode de Paul n'est pas envisageable?
Je me suis donc rabatu sur la méthode numérique deltaX = J-1 deltaQ AVEC j-1 inverse du jacobien.
Mais cette méthode lie des écarts de coordonnées alors comment en déduire la relation liant les coordonnées (intégration)