Effectivement, la prochaine mission "agricole" de Pablo ressemblera aux au tracés de crops circles ... plus précisément une fonction "NOT Crop Circle", à suivre d'ici quelques lunes ...
Aujourd'hui on parle Odométrie.
C'est un sujet très bien documenté un peu partout sur le net, je laisse donc la théorie de côté et j'aborde ici le côté réalisation.
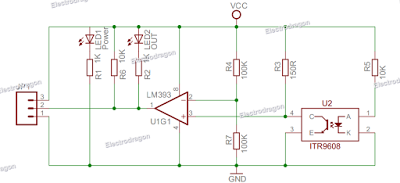
Pour estimer sa position hors GPS et sur de petites distances (c'est à dire quelques quelques mètres à l'échelle de sa tâche) Pablo reçoit les informations depuis un petit module Arduino qui compte le nombre de tours de chacun des deux moteurs, deux capteurs montés en quadrature sont nécessaires pour déterminer le sens de rotation.
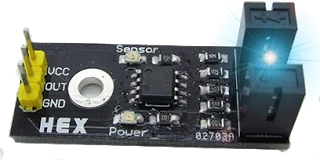
Les capteurs :
Les capteurs utilisés sont disponibles à cette adresse.
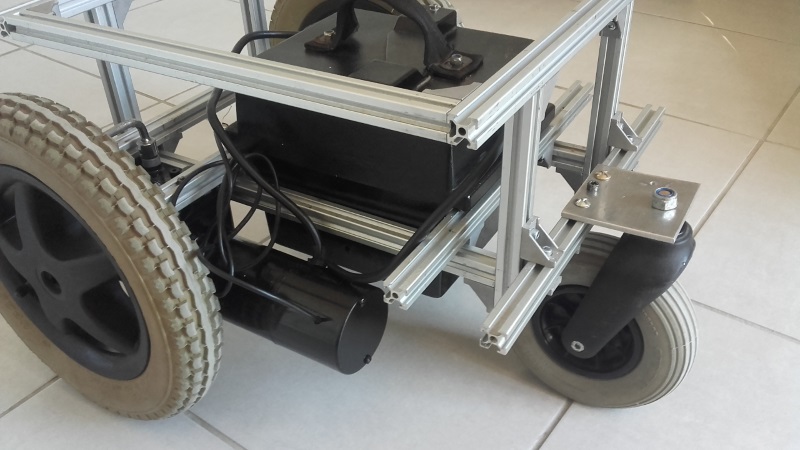
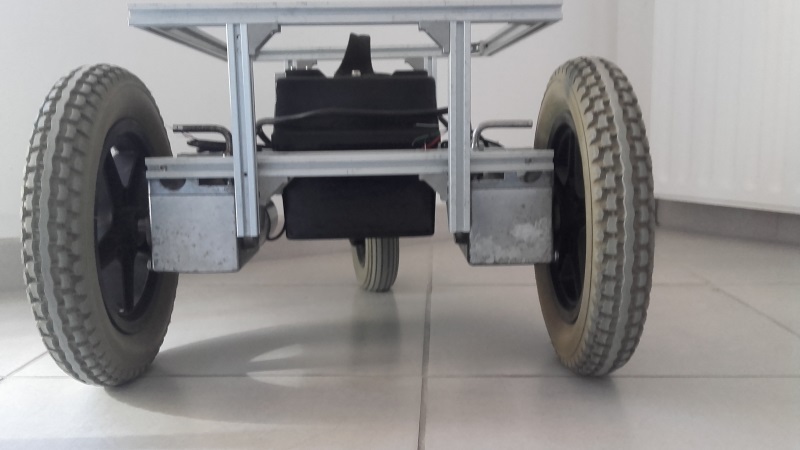
Les moteurs :
Les moteurs utilisés sont du type Dynamic WMT 90103
Il n'y a pas de capteur sur ce type de matériel, il faut les modifier.
Après avoir libéré le carter on aperçoit le frein électrique. On le retire car il est inutile pour Pablo et qu'on a besoin de place pour insérer les capteurs.
La place est libre, l'axe du moteur est visible.
On équipe l'axe avec une tige filetée fixée avec une colle spéciale métal.
La roue en époxy est fixée sur l'axe fileté.
Puis on fixe les codeurs optiques avec des tiges acier qui permettent d'ajuster les circuits par rapport à la roue codeuse.
Pour finir on câble l'alimentation 5 Volts et les signaux des codeurs
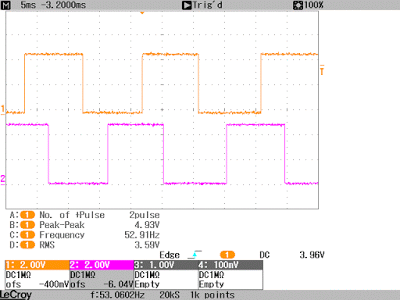
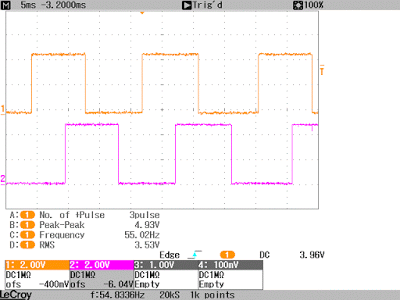
Pour déterminer le sens de rotation, les capteurs sont montés en quadrature. Voici les signaux générés lorsque le moteur est en rotation, ils sont clairement décalés dans le temps.
Rotation en sens horaire :
Rotation en sens anti horaire :
A suivre : on connecte les capteurs à un petit Arduino pour remonter les informations à Pablo.
































![[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé - dernier message par gerardosamara](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9527.jpg?_r=1459009420)




