
Merci !!
Je grokiffe mon hector !!

219 réponses à ce sujet
#82

Path
-
- Modérateur
-

- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 01 novembre 2017 - 04:50
Je suis en train de concevoir la partie logiciel de la motorisation dans l'arduino.
Il y a 2 moteurs CC pilotés via 2 pins PWM, 2 roues codeuses avec leurs interruptions et une roue folle.
L'arduino sera piloté avec des commandes du type : avance, recule, rotation.
Avance ou recule de X mètres.
Rotation de X degrés dans un sens ou l'autre autour de son centre.
NB. On verra plus tard pour lui faire faire des arcs de cercle.
Pour qu'il aille droit ou pour que le centre ne bouge pas pendant une rotation, il s'agit de faire tourner mes moteurs à la même vitesse l'un par rapport à l'autre.
Je commence par obtenir la vitesse instantanée des 2 moteurs avec les roues codeuses. J'applique un asservissement de la commande moteur fonction de cette vitesse constatée. La consigne étant la même pour les 2 moteurs.
Jusque là, (j'en transpire d'avance mais) je crois pas être déconnant.
Cet asservissement doit aussi me permettre d'injecter une une consigne variable pour accélérer au début du parcours et décélérer à la fin pour éviter de patiner.
C'est comme ça que vous feriez ?
#83
Mike118
-

- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 01 novembre 2017 - 06:23
Perso je fais du go to position en x, y, teta en utilisant une fonction avance ( vitesselineaire, vitesseangulaire ),
et on peut aussi spécifier l'accélération max.
Mais il est possible de faire avance ( distancelineaire, distanceangulaire) si c'est ce que tu souhaites =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#85
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 01 novembre 2017 - 06:30
Pour cela il faut utiliser des outils du type " schémas bloc " =)
ça marche très bien =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#86
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 02 novembre 2017 - 11:53
J'ai imaginé Hector comme on programme en logo : avance de X, tourne de Y, avance de Z.
Le raspberry a la responsabilité de la géométrie extérieur, de sa position absolue dans son espace et de sa géométrie interne : position des roues et des capteurs de distance. L'arduino tourelle donne des distances sans se soucier de sa position dans le robot. L'arduino propulsion a la responsabilité de déplacer le robot avec des commandes relatives. Comme en logo.
A priori, je n'ai pas besoin d'un PID composé translation, rotation. J'ai juste besoin d'un asservissement des moteurs pour qu'ils aillent réellement à la même vitesse.
Sauf s'il y a un moyen plus simple pour qu'ils aillent à la même vitesse, je vais tester cette lib
http://www.robot-maker.com/shop/blog/33_Asservir-moteurs-courant-continu-PID.html
Bien détaillée ici : http://playground.arduino.cc/Code/PIDLibrary
et théorisée là : http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pid-introduction/
Pour l'accélération au démarrage et la décélération à l'arrivée, je vais juste faire varier la consigne.
#87
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 03 novembre 2017 - 05:04
Alors, après une profonde réflexion et un peu de code, j'ai juste piloté le moteur B fonction de l'erreur que je constate avec le moteur A.
J'ai pas utilisé la lib PID, je ne voulais pas passer des heures à définir les 3 constantes. J'ai fait un PID maison avec juste la proportionnelle et l'intégrale. Et une unique constante.
https://github.com/P.../propulsion.ino
Avec ce code, les 2 moteurs vont à la même vitesse !! Et Hector file droit !!
A ce stade, j'ai pas grand chose à montrer à part des roues qui tournent ^^ Hector a encore un fil d'alim. à la patte.
Là, il me reste à coder le rapsberry. Je dois affiner les données de la tourelle pour pourvoir définir des passages et commander la propulsion.
Pour mémoire, l'objectif final est qu'il sache aller n'import où dans mon appart.
1er sous objectif, faire la carto de mon appart.
- Oliver17 et BrunoS aiment ceci
#88
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 03 novembre 2017 - 05:46
est ce que ça te tente d'essayer d'asservir la vitesse de ton moteur non pas sur l'autre moteur mais d'asservir chacun des moteur sur la somme des 2 divisé par 2 ? =)
Ainsi tu feras ce qu'on appel de l'asservissement sur la vitesse linéaire de ton robot. =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#90
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 03 novembre 2017 - 06:14
hum non je ne connais pas de nom particulier à ce que tu fais pour le moment...
Je dirais juste que tu asservis un moteur par rapport à l'autre ...
du coup en effet ça le fait filer droit
EDIT Je me suis trompé dans ce que je t'ais dit tout à l'heure j'ai parlé un chouilla trop vite, ton but c'est de le faire filer droit ^^ tu dois asservir tes moteurs sur la vitesse angulaire ( pas la linéraire ^^)
Donc ne fait pas ce que je t'ai proposé pour le moment =)
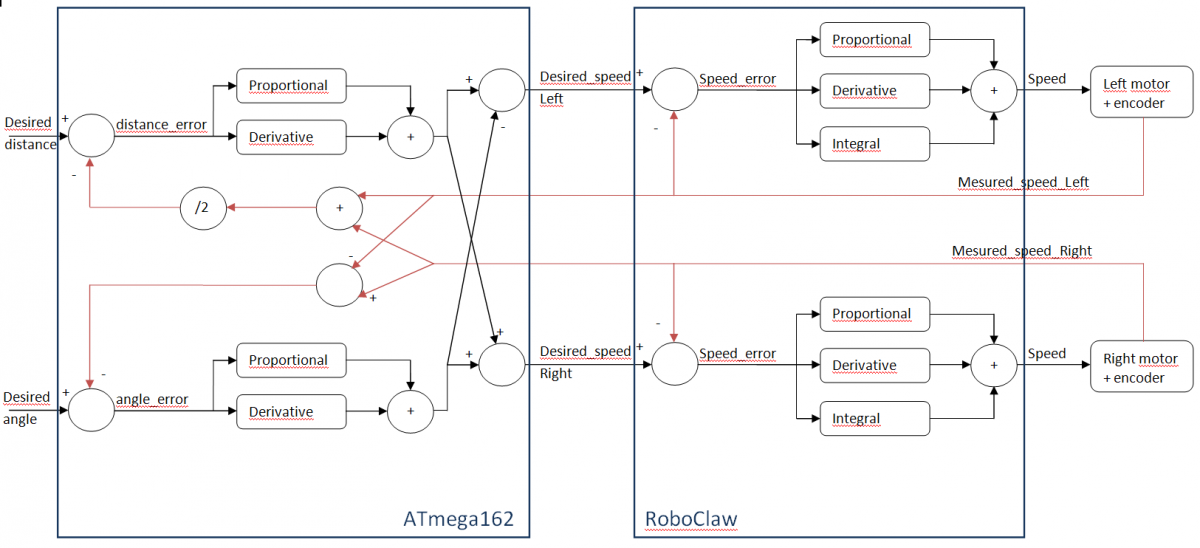
Par contre l'asservissement polaire c'est quand tu fais de l'asservissement angulaire et linaire ...
J'avais déjà eu une discussion sur l'asservissement polaire à l'époque avec transistance
Malheureusement les images n'étaient pas hébergé sur robot maker et le sujet a perdu beaucoup d'information.
voilà une image tiré du net ( équipe SMART qui participe ( participait ? ) aux coupes de france de robotique =) ) d'un exemple d'asservissement polaire
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#91
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 03 novembre 2017 - 06:34
Merci.
Là, avec le pilotage de l'un par rapport à l'autre, ça fonctionne mieux que j'attendais ^^ Et je trouve cela simple.
Quelques exemples tout chaud de mes essais :
READY FINISHED:6000:6001 FINISHED:6010:6011 FINISHED:16:17 FINISHED:16:18 FINISHED:6003:6003 FINISHED:6005:6006
Sans la correction, j'ai des écarts de 100 à 200 
#92
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 03 novembre 2017 - 07:01
Oui ce que tu as fais en soit est très bien et simple c'est une excellente première approche pour résoudre le problème qui est " d'aller droit " =)
Ne le change que lorsque tu trouveras cette approche limité pour ce que tu souhaites faire
La plus grosse critique qu'on peut faire sur cette façon de faire je pense c'est qu'elle est " asymétrique " . Un premier moteur est asservi à une vitesse donné et l'autre moteur est asservie sur la vitesse mesuré sur le premier moteur. .
( => Mais ce n'est pas un problème pour juste la ligne droite ^^ => La preuve vu que ça marche bien )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#93
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 03 novembre 2017 - 08:10
D'accord avec toi. Rappels-toi, j'explore l'odométrie avec Hector parce que c'était devenu trop compliqué avec Ash "le self balancing robot". Il me faut le temps d'intégrer tout ça. Et ça vient ^^. Etapes par étape.
#94
gerardosamara
-

- Membres
-
- 374 messages
Membre passionné
- Gender:Male
- Location:Costa Rica & Bretagne
Posté 04 novembre 2017 - 03:51
C'est vraiment super de partager et très instructif pour les amateurs de base roulante
Sur le forum il y a plus de projets de bipèdes que de bases roulantes ( char , rover , .. )
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/


#96
Donovandu88
-

- Membres
-
- 680 messages
Membre chevronné
- Gender:Male
Posté 06 novembre 2017 - 12:28
Sympa ton projet.
Pour ton moteur pas à pas de tourelle. Si tu veux pouvoir te passer de capteur, tu peux mettre à une position donné ta tourelle avant d'allumer le robot et comme ça, dans le programme, tu lui assigne la position 0. Tu lui donnes les angles maximum pour éviter les collisions.
Et pourquoi ne pas utiliser de moteurs pas à pas aussi pour la partie roulante du robot? Plus facile à gérer.
Pour ton moteur pas à pas de tourelle. Si tu veux pouvoir te passer de capteur, tu peux mettre à une position donné ta tourelle avant d'allumer le robot et comme ça, dans le programme, tu lui assigne la position 0. Tu lui donnes les angles maximum pour éviter les collisions.
Et pourquoi ne pas utiliser de moteurs pas à pas aussi pour la partie roulante du robot? Plus facile à gérer.
#97
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 06 novembre 2017 - 06:59
Il a un an. Il marche pas encore, tout va bien ^^
Biensûr que je veux mon capteur de fin de course. Cest justement le capteur qui donne la position 0. À partir de là, il y a 800 pas pour faire exactement 90 degrés. Le robot cherche son 0 tout seul. Comme une imprimante cherche la position du bed sur son axe z. Pareil. Cest dailleurs de la récup de mon imprimante ^^
Quant aux roues, je navais pas de pas à pas il y a un an
Biensûr que je veux mon capteur de fin de course. Cest justement le capteur qui donne la position 0. À partir de là, il y a 800 pas pour faire exactement 90 degrés. Le robot cherche son 0 tout seul. Comme une imprimante cherche la position du bed sur son axe z. Pareil. Cest dailleurs de la récup de mon imprimante ^^
Quant aux roues, je navais pas de pas à pas il y a un an
#98
Donovandu88
-
- Membres
-
- 680 messages
Membre chevronné
- Gender:Male
Posté 06 novembre 2017 - 07:43
Biensûr que je veux mon capteur de fin de course. Cest justement le capteur qui donne la position 0. À partir de là, il y a 800 pas pour faire exactement 90 degrés. Le robot cherche son 0 tout seul. Comme une imprimante cherche la position du bed sur son axe z. Pareil. Cest dailleurs de la récup de mon imprimante ^^
Ce que je voulais dire, c'est que sans le capteur, tu peux quand même avoir le 0 mais il faut placer le capteur dans une certaine position (toujours la même) à la main. C'est comme ça que je fais sur mon bras robot.
Quant aux roues, je navais pas de pas à pas il y a un an
Car c'est beaucoup plus simple et précis à utiliser.
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : VL53L0X, Odomètrie, RPLIDAR A2, Arduino Due




0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




