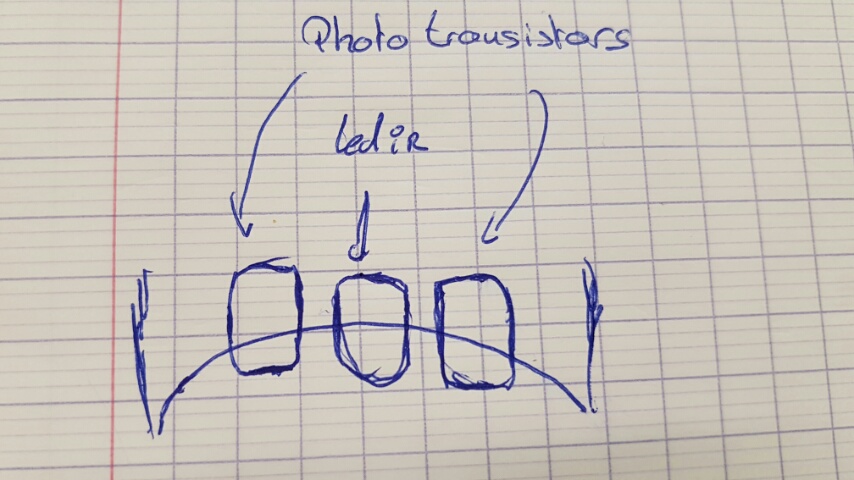
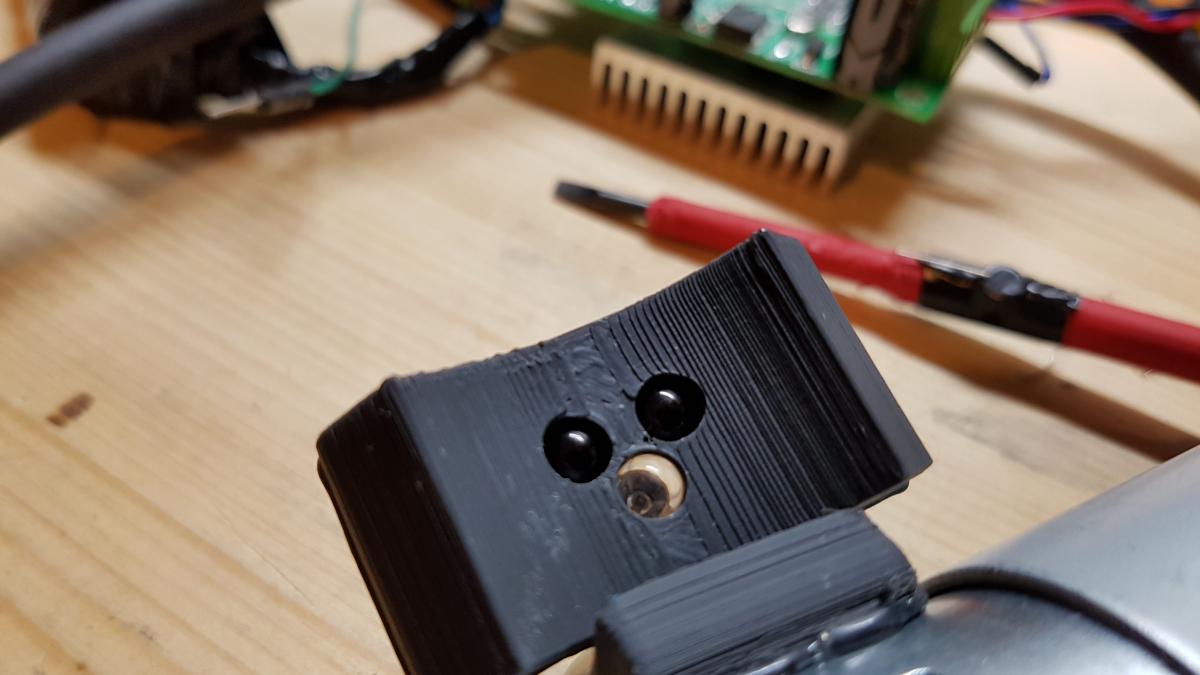
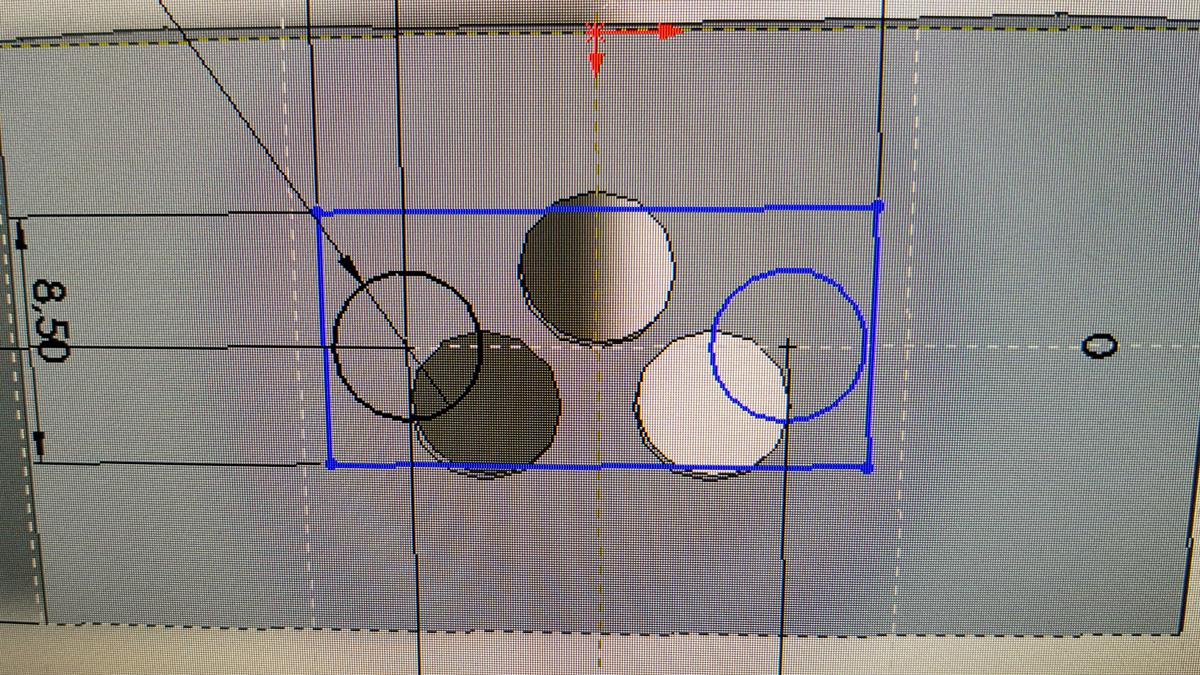
Tu peux modifier ta pièce de manière à mettre 2 " codeurs " sur un même trou ? =)
PS :
1)Il existe des vrai " comparateur " plutôt que d'utiliser un AOP en mode comparateur =)
2)Il existe aussi de AOP rail to rail en 5V pour plus facilement les utiliser avec une logique 5V si tu veux vraiment utiliser des AOP =)
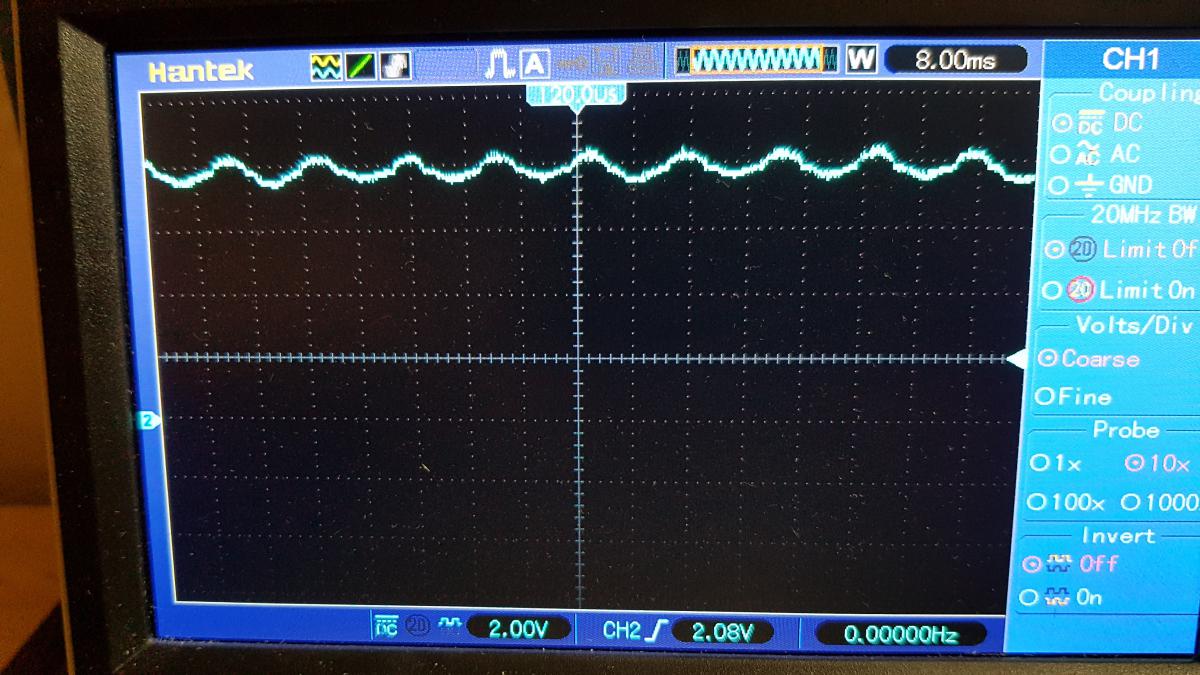
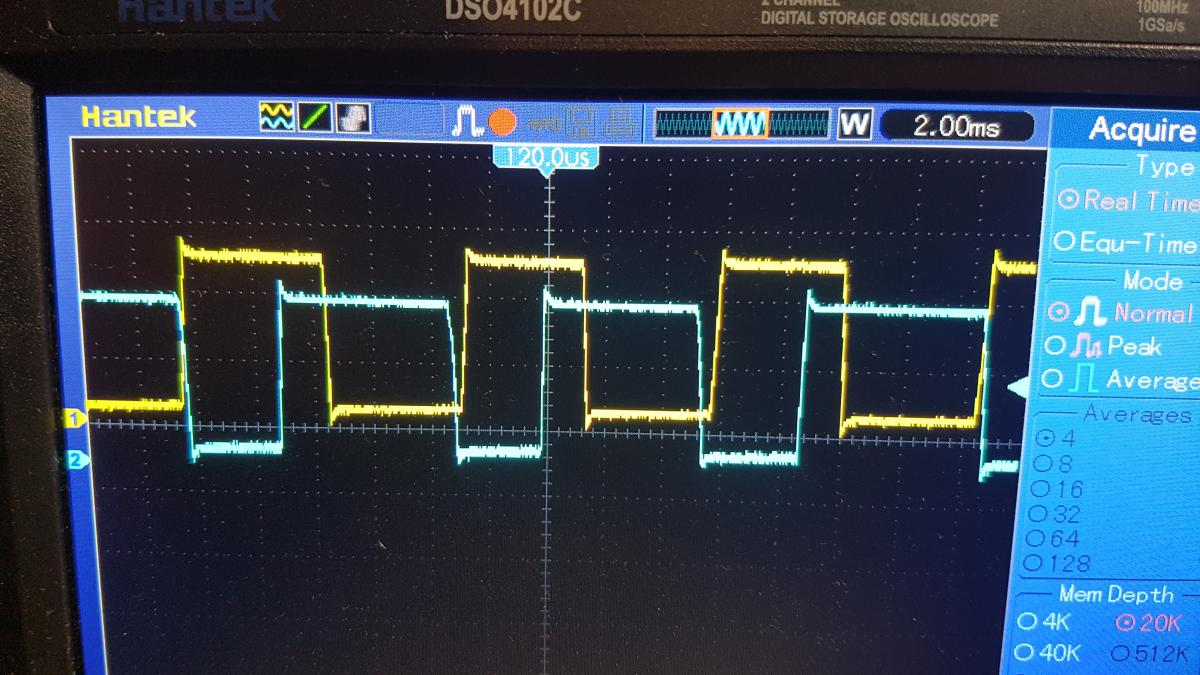
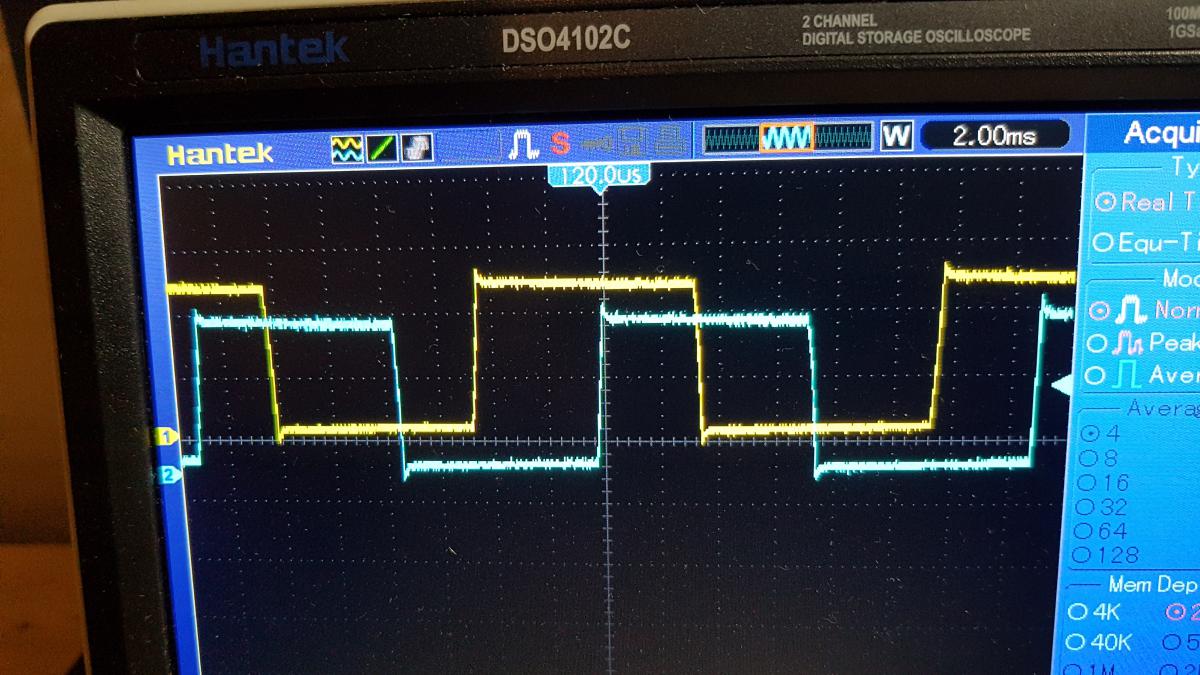
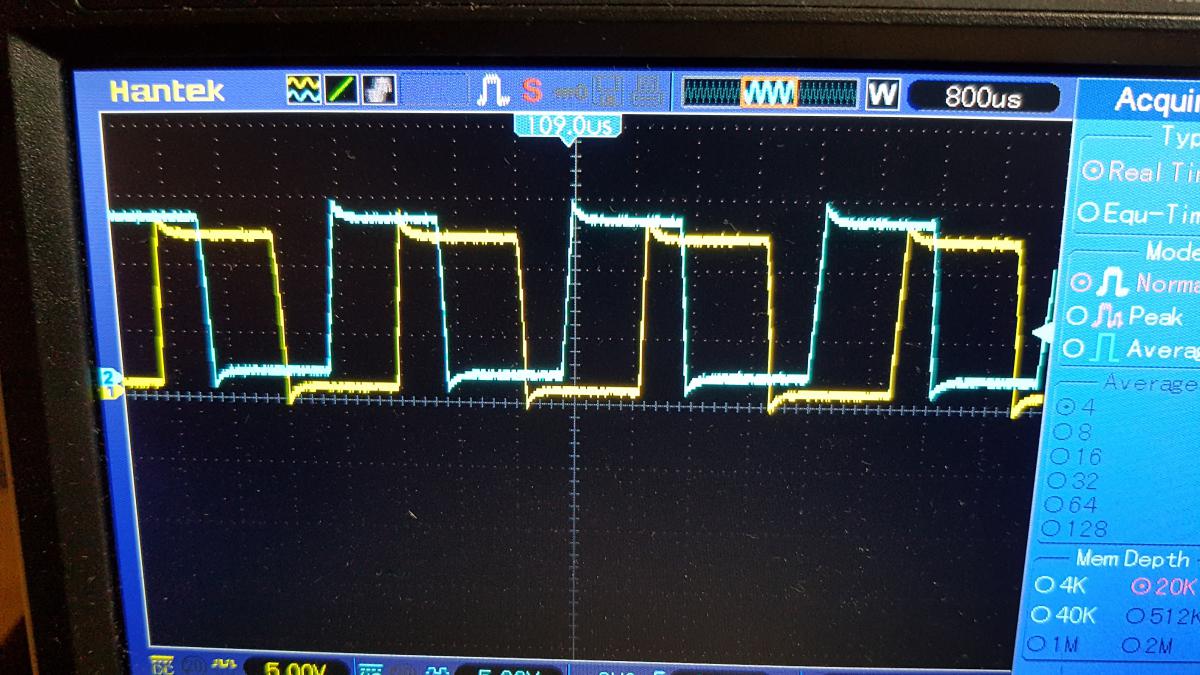
3) Est il vraiment utile de mettre un comparateur sur le photo-transistor ? Si tu enlève l'aop et qu'au lieu d'alimenter ton ensemble en 12V tu l'alimente en 5V, ( en modifiant la résistance pour la led  ) quand tu regardes le signal de sortie entre la résistance et le photo-transistor à l'oscillo le signal il est pas assez " propre " ?
) quand tu regardes le signal de sortie entre la résistance et le photo-transistor à l'oscillo le signal il est pas assez " propre " ?