

Bonjour,
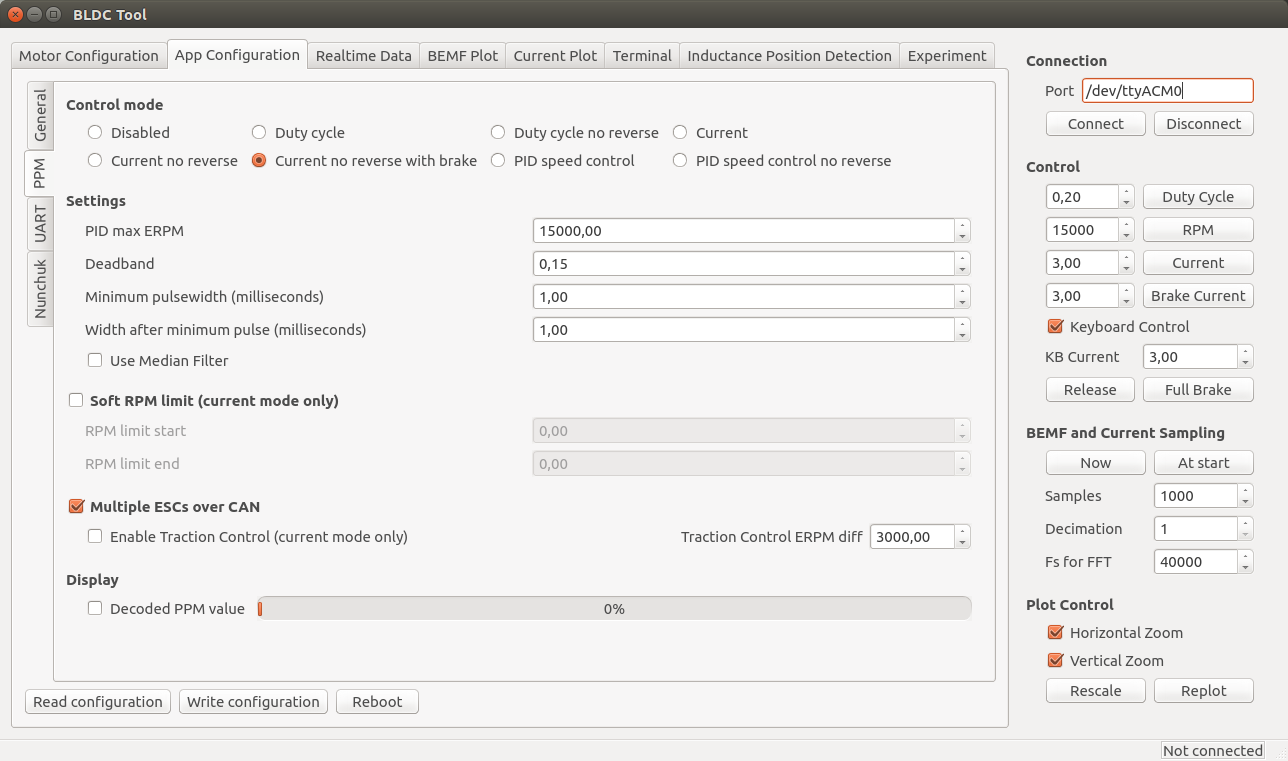
il y a quelque temps, j'ai décidé de fabriquer un vélo électrique en m'inspirant du travail d'un gars (https://www.thingive...m/thing:2191603) qui utilise des composants d'aéromodélisme comme motorisation. Quasiment tout a fonctionné comme sur des roulettes excepté une chose : la poignée d'accélérateur transmet un signal analogique mais le variateur (ESC) à besoin d'un signal numérique. J'ai donc utilisé un arduino pour convertir le signal mais je n'ai pas réussi à tout faire fonctionner car quand j'actionne la poignée, le moteur fais quelques tours puis fais une petite pause avant que je puisse le réactiver. Quelqu'un aurait une idée du problème et de la façon de le résoudre ?
merci
Fichier(s) joint(s)
-
 poignee_v4.ino 211 octets
284 téléchargement(s)
poignee_v4.ino 211 octets
284 téléchargement(s)





















{kind=link}