Bonjour
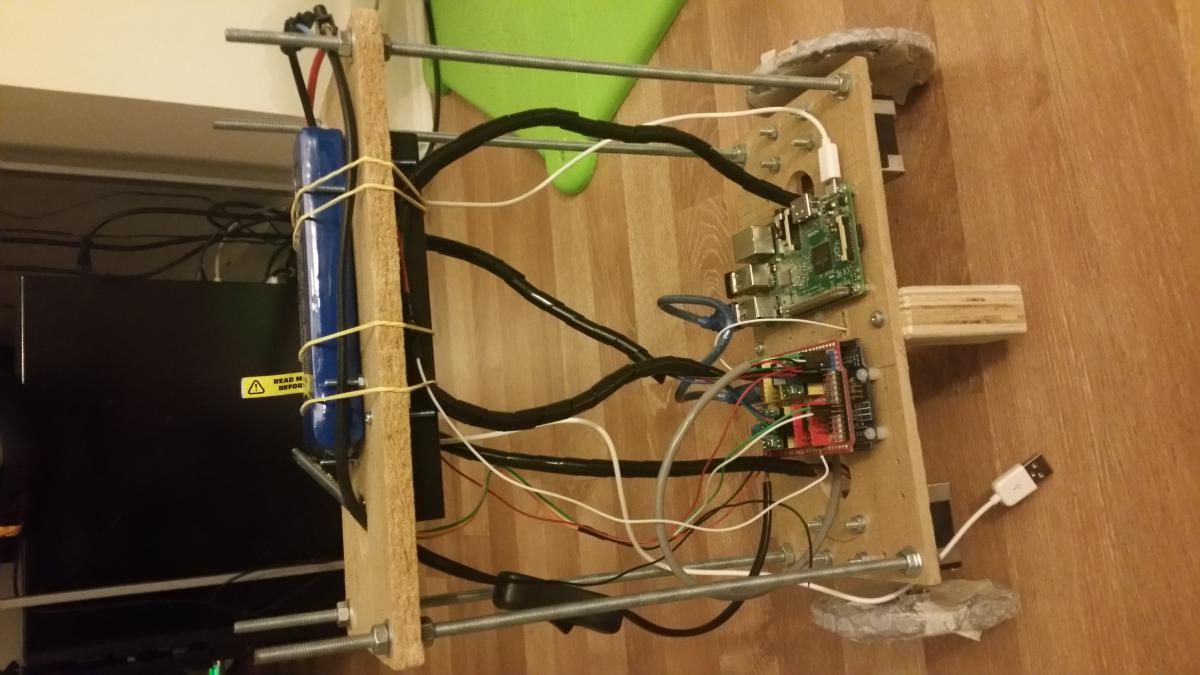
Je me permets de vous présenter mon robot de type "Self Balancing" nommé ‘’URSA ‘’.
J'utilise:
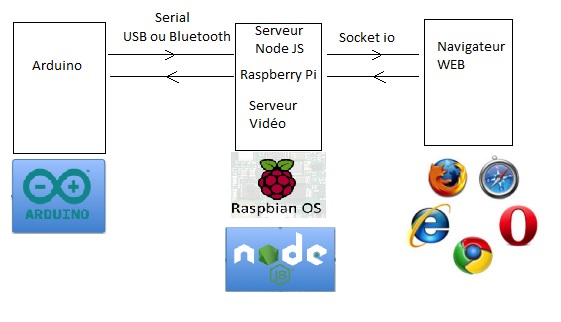
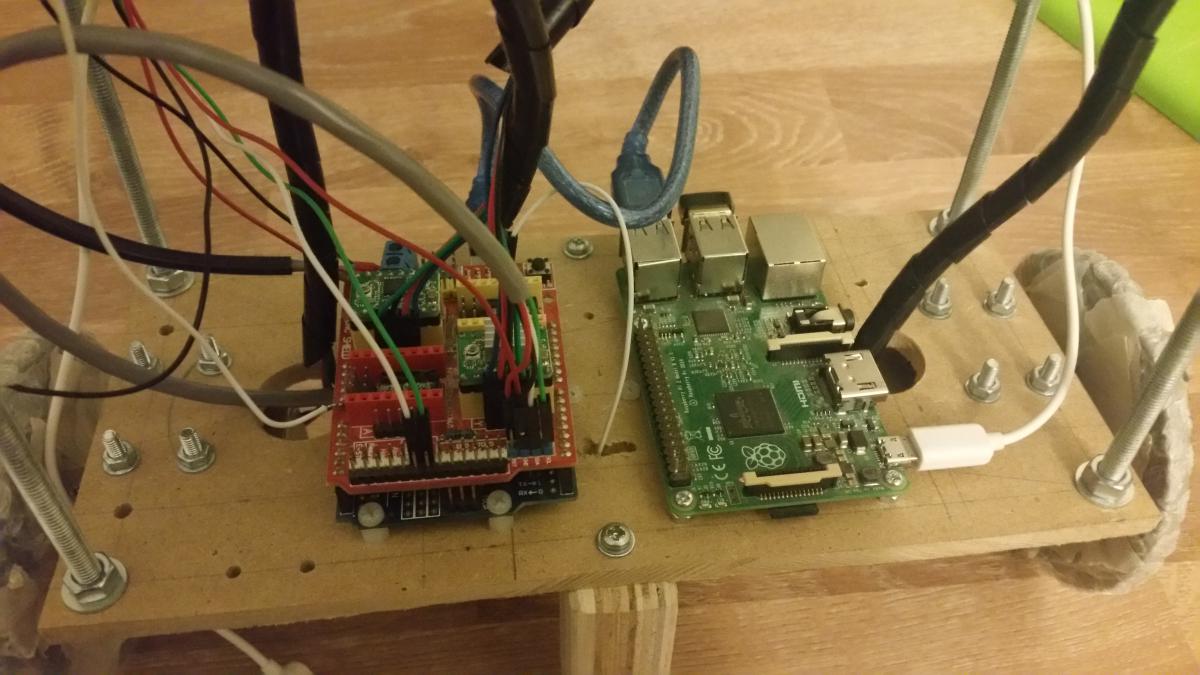
Serveur : Raspberry PI 2
Contrôleur : Arduino UNO
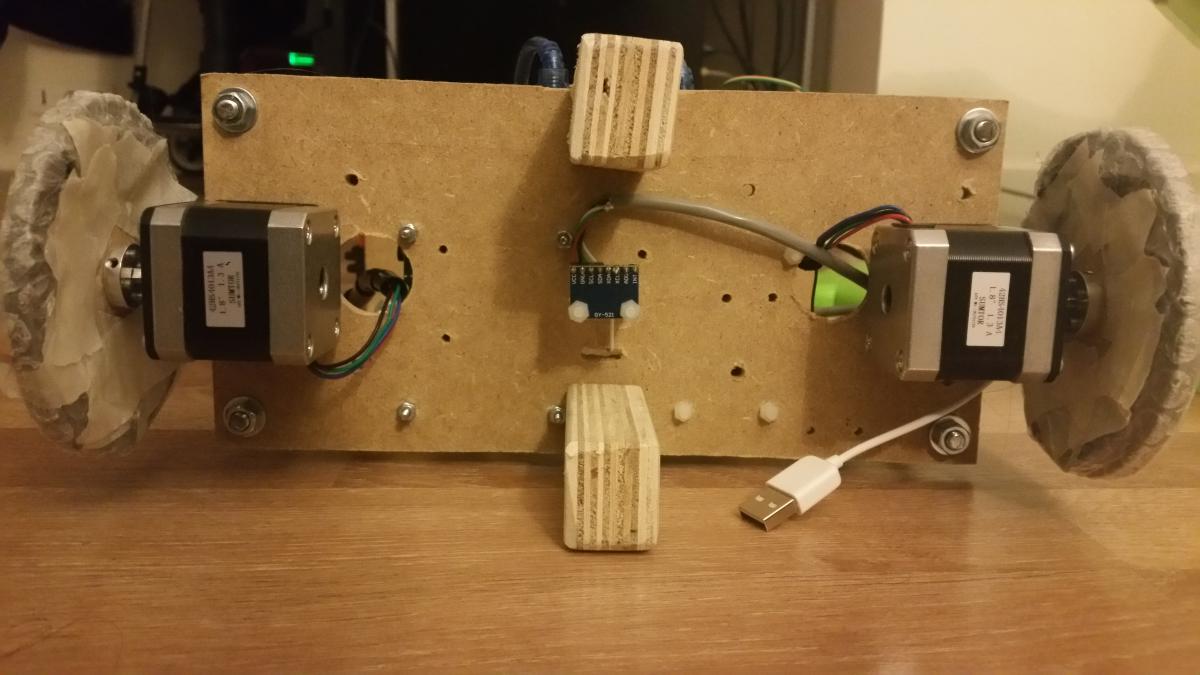
Moteur : 2 x Nema 17 moteur pas à pas
Driver Nema 17 : A4988
Centrale inertielle : MPU 6050
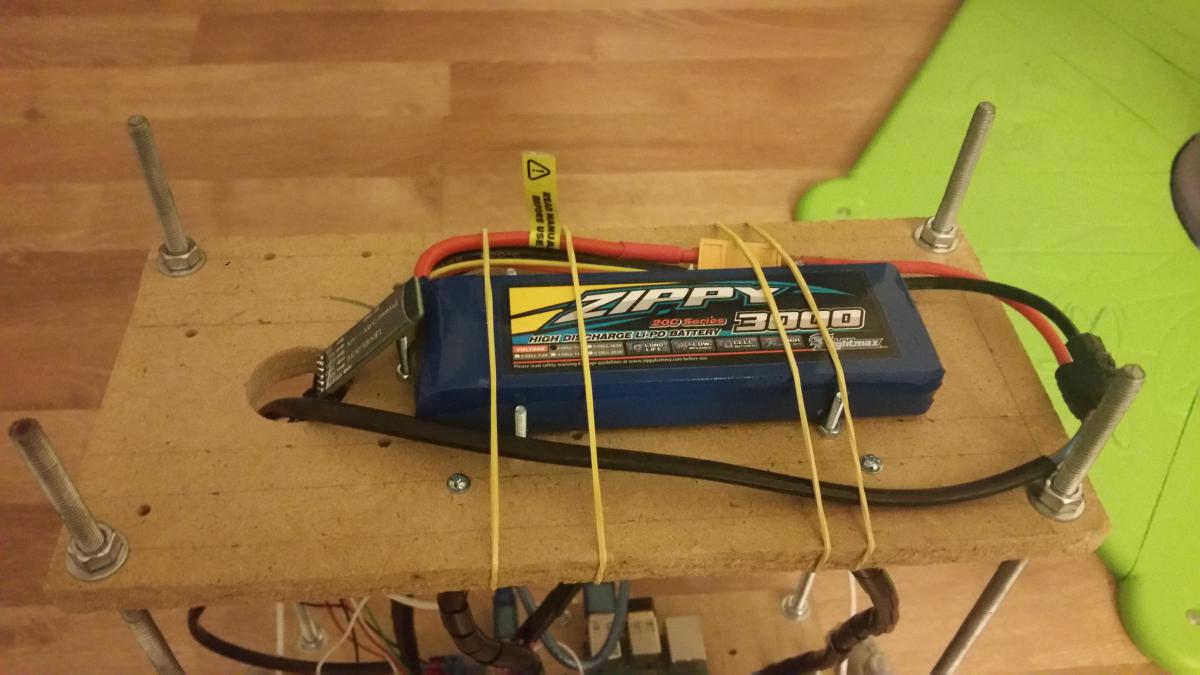
Batterie : LIPO 3S 3000maH
Batterie 5V : Batterie chargeur portable 12000mah (j’avais ça sous la main)
Châssis : Medium + tige fileté
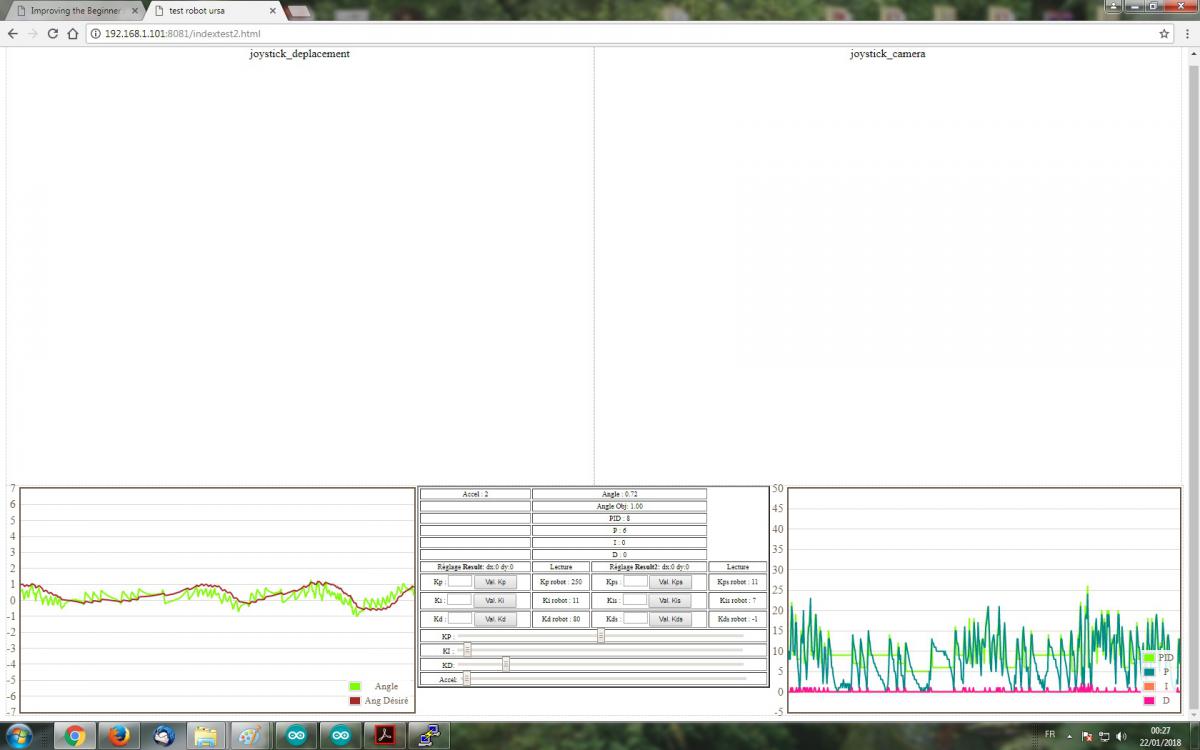
Pour la partie Serveur je suis partie sur node.js (merci le tuto de Ash et en général les tutos de Locoduino) et une interface de commande et télémétrie via une page html. Le robot est donc pilotable depuis un pc ou un smartphone.
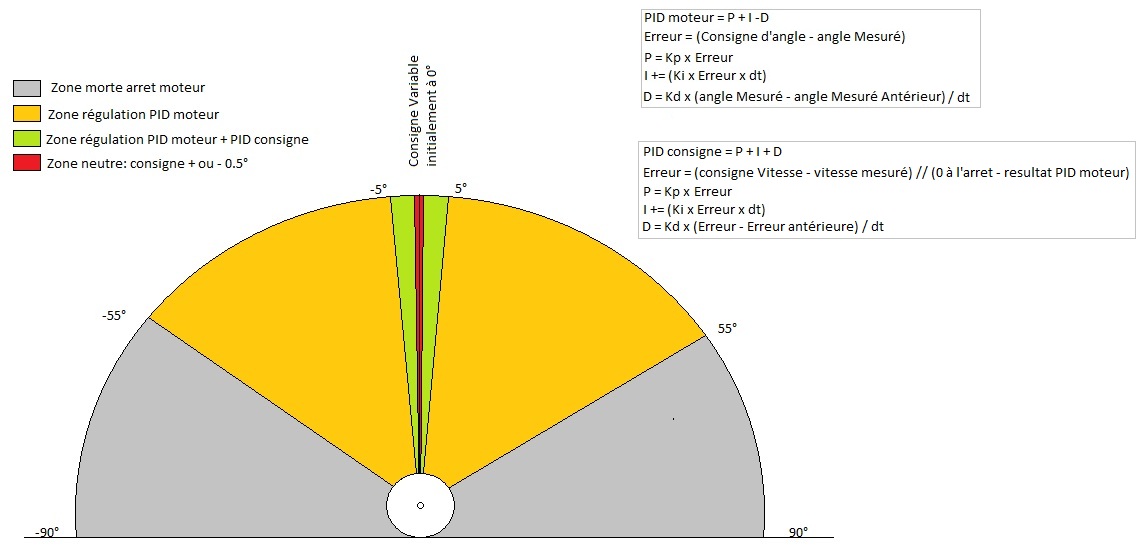
Pour l'instant j'en suis au balbutiement du Balancing. En effet il tient debout en position statique mais pas mal de boulot sur le réglage.
Petite vidéo pour le Balancing a l’arrêt:
Une autre ou il se déplace mais fini par tomber :
Voila il faut que je finisse les réglages des PID.
Après cela je compte:
- alléger le robot qui pèse quand même 2kg, dans un premier temps diminuer le diamètre des roue car je manque de couple
- rajouter un pan tilt et faire un combo "camera pi - HC 04" mais je suis limité sur la UNO au niveau des TIMERS(si quelqu'un sait si on peut modifier le Timer 0 et continuer à gérer le temps car j'ai renoncer à modifier ce Timer? J'utilise Timer1 et Timer2 pour le pilotage des moteurs) donc à voir si je pilote les Servo avec le Raspberry PI via python ou via une Arduino Nano que j'ai de disponible.
- se pencher sur Open Cv pour traiter la vidéo, faire de la reconnaissance d'objet, d'obstacle. J'ai déjà un serveur uv4l sur le Raspberry avec un simple retour video
- essayer de faire un lidar du pauvre
- faire toute la partie autonomie du robot
Voila après j'ai encore beaucoup idées mais ça fait déjà beaucoup et faut se limiter car on s’éparpille très très vite.
N’hésitez pas à poser des questions sur le robot ainsi qu'à me conseiller, car j'ai fait des choix après pas mal de lecture mais je n'ai que de très faible connaissance en programmation.
Modifié par Mike118, 07 janvier 2019 - 03:15 .
Inclusion des vidéo :)