

Bonjour,
Le but de ce topic ,est comme évoqué dans le titre et dans mon autre sujet sur on robot en Meccano, de trouver des encodeur a adapter sur le axes Meccano.
Je n'ai pas envie de changer les moteur car j'ai deja eu du mal a les mettre et cela voudrai dire changer tout mon châssis.
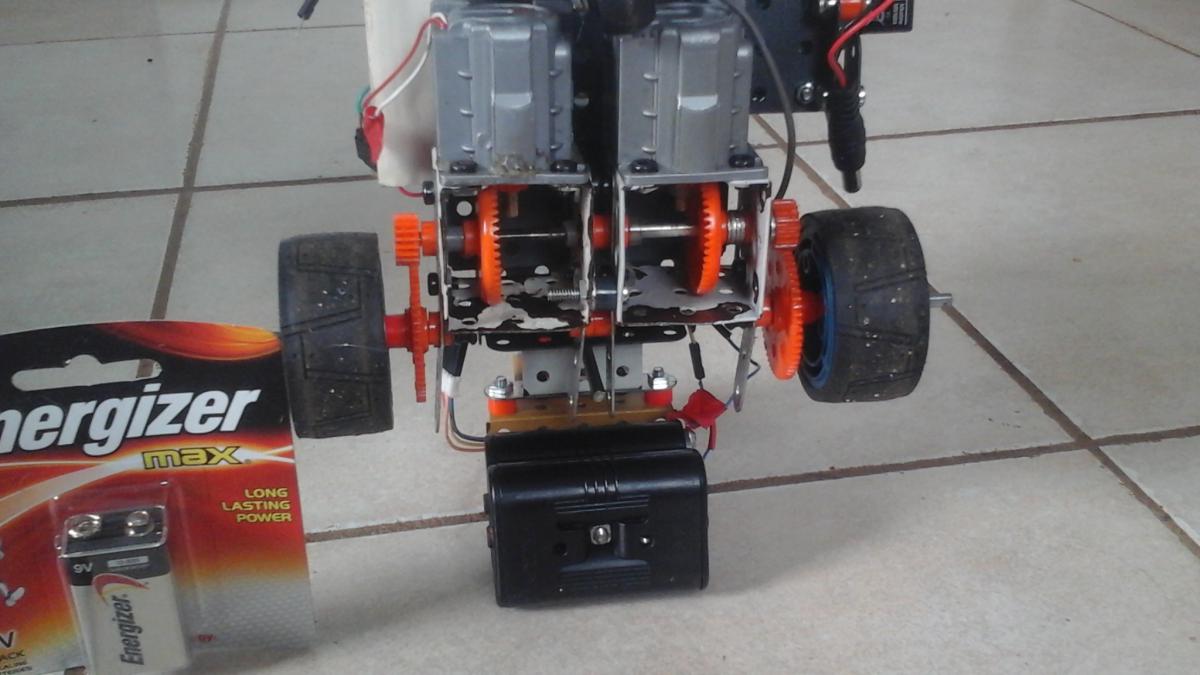
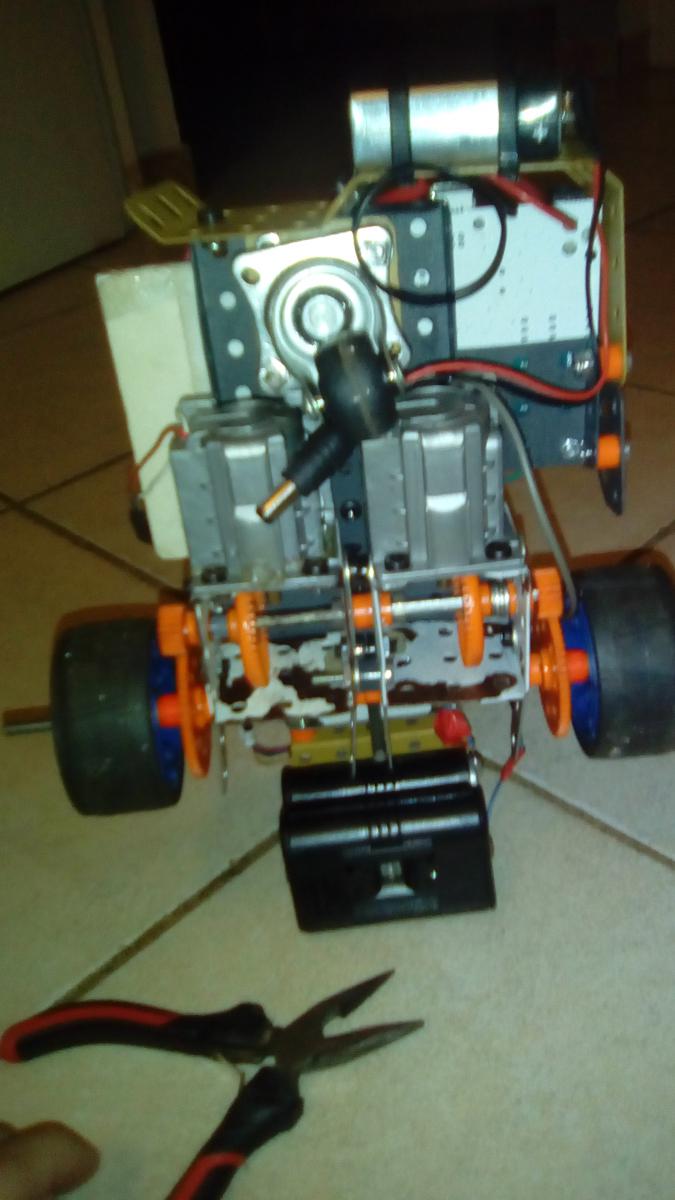
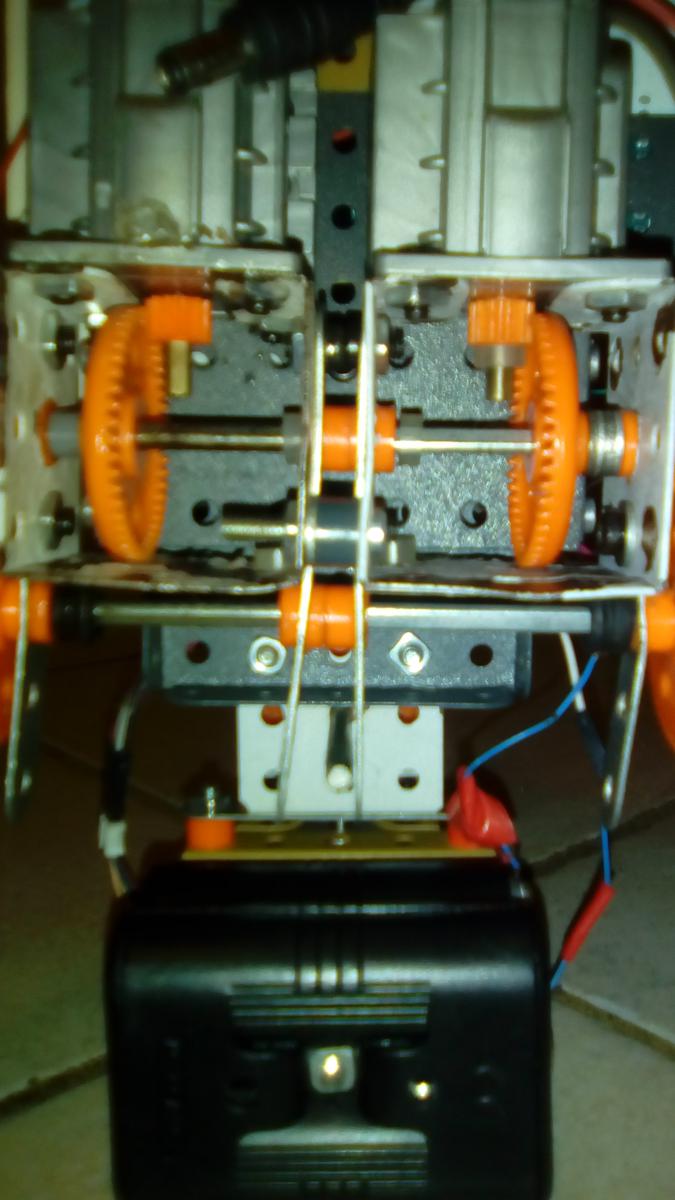
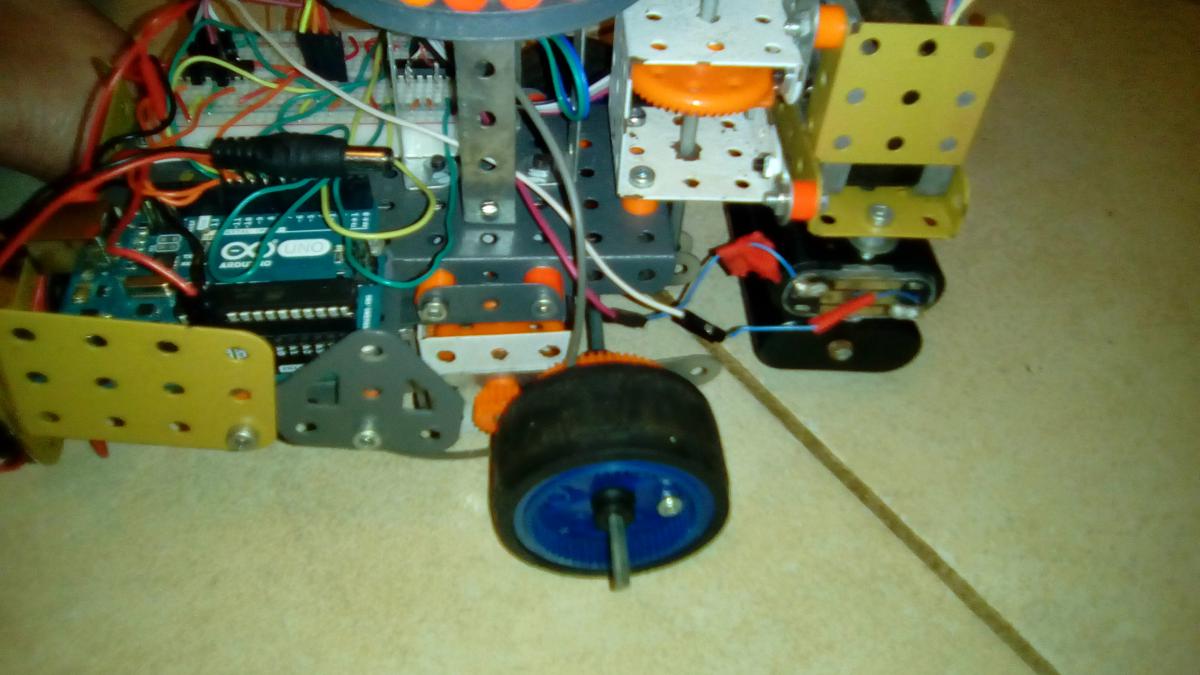
le problème c'est que ces axes sont un peu triangulaire et assez gros (je peux pas mesurer leur diamètre maintenant mais bientôt).
J'ai eu l'idée il y a quelques jour de faire une sorte d'adaptateur imprimée en 3D mais je ne pas d'imprimante par contre j'ai vue que le forum proposée des services.
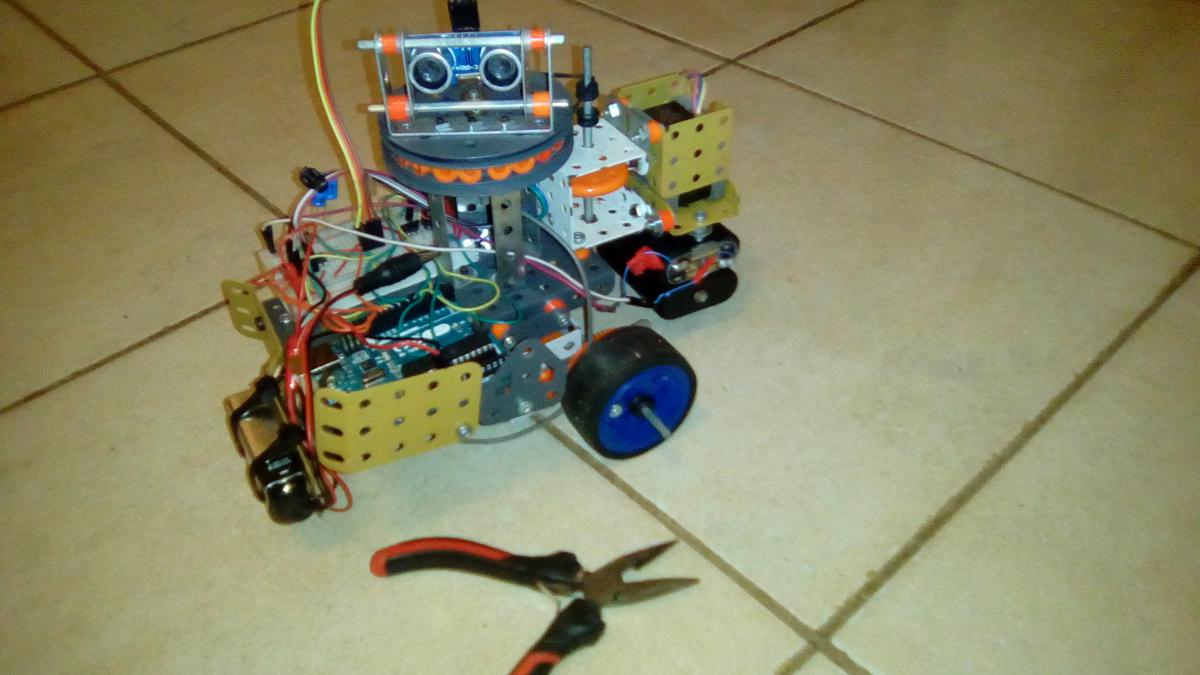
les photos des Axes:
Pensez vous que la solution avec l'imprimant 3D est viable sinon connaissez vous des encodeur avec des axes aussi gros ??
j'ai fait des recherche sur internet mais il y a beaucoup de choix et je ne sais pas vers quoi me diriger.






 vue que je n'ai rien réussi a bouger mais j'ai plein de question maintenant:
vue que je n'ai rien réussi a bouger mais j'ai plein de question maintenant: 
 que je pense régler dans le weekend en faisant des test.
que je pense régler dans le weekend en faisant des test.

















