
Ça à l'air complexe :
https://commons.wiki...umbered_165.png
Est-ce qu'un joint SPI ne suffit pas ? (chez 123roulements y'en a dans des tailles adaptées et pas trop cher si je veux essayer pour plus tard).

Membre occasionnel

Posté 28 juillet 2019 - 12:03
Ça à l'air complexe :
https://commons.wiki...umbered_165.png
Est-ce qu'un joint SPI ne suffit pas ? (chez 123roulements y'en a dans des tailles adaptées et pas trop cher si je veux essayer pour plus tard).
Pilier du forum

Posté 28 juillet 2019 - 12:27
complexe à réaliser c'est clair. Car il faut 2 pièces en céramique rectifiées
Dernièrement j'en ai monté une sur une bécane en diamètre 40mm ... 1300€ le petit morceau 
Donc clairement pour des projets amateur il faut oublier.
Le joint SPI fonctionne très bien pour l'étanchéité de l'huile (il y en a plein sur les moteurs/boite de vitesse)
et fonctionne assez bien avec l'eau
Par contre il faut une bonne concentricité des pièces, faire attention lors du montage car le racleur est fragile
Le joint à lobes est aussi une bonne alternative et plus simple à intégrer (https://www.francejo...ings---x-rings/ )
Membre occasionnel
Posté 15 mars 2022 - 07:47
Après une grosse baisse de motivation, j'ai enfin retrouvé le courage de m'y remettre.
La coque est quasiment terminée : plutôt que de faire les nombreux perçages dans la cloison arrière de la coque (l'étape à laquelle je m'étais arrêté faute d'arriver à percer avec suffisamment de précision), j'ai dessiné une pièce en 3D, imprimée en PETG.

Idem pour l'avant. Le trou sera bientôt comblé par un morceau de plexiglas transparent au travers duquel la caméra filmera.

Si vous vous souvenez bien il était prévu de faire tourner les moteurs directement dans l'eau. C'est toujours prévu comme ça pour les premiers essais mais je compte faire une mise à jour rapide vers des moteurs en "pods" étanches.
L'objectif est une première plongée en "vraie" pour le mois d'août. Premiers essais en statique dans 2 semaines dans la baignoire puis en dynamique dans la piscine d'un pote (s'il est d'accord  )
)
Membre occasionnel
Posté 06 mai 2022 - 02:20
Quelques péripéties personnelles ne m'ont pas permis de tester l'étanchéité du sous-marin, c'est donc repoussé à un futur proche. En attendant j'ai fini l'extérieur (collage d'un hublot en plexiglas sur la cloison avant) et l'intérieur : design et impression des supports pour la caméra, la Raspberry Pi, le contrôleur moteur...
Le résultat en image :

Les supports après impression et assemblage, il manquait encore les différentes barres de liaisons
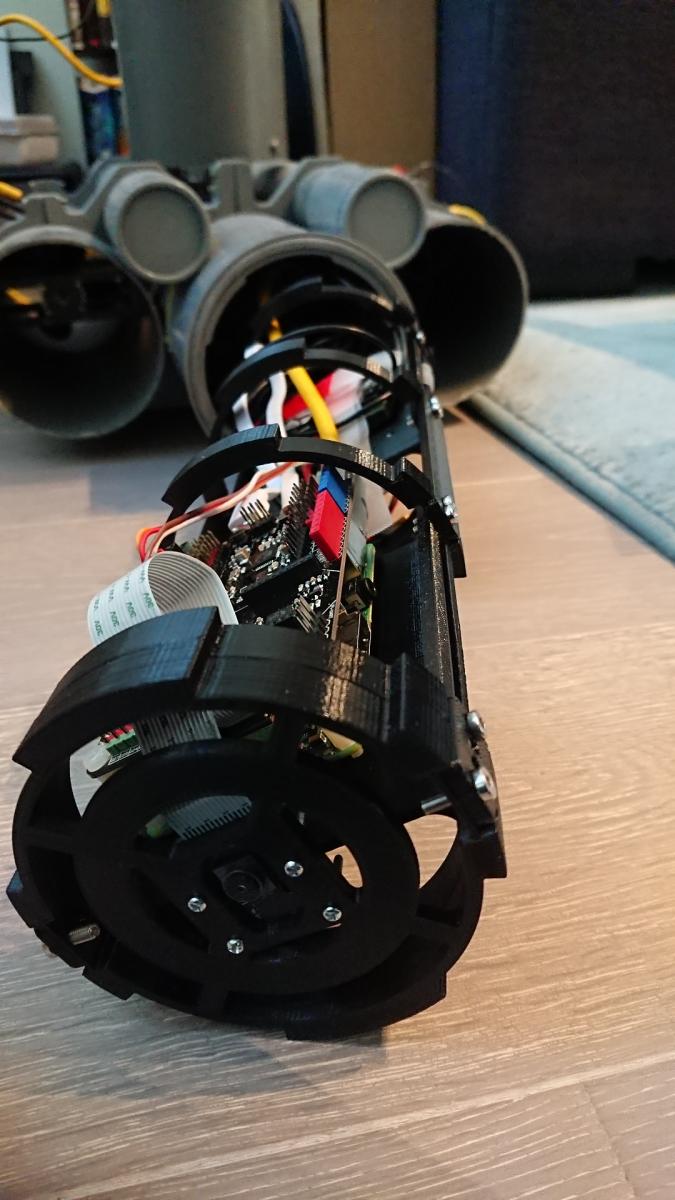
Voici l'assemblage final

Une vue d'ensemble avant les essais d'installation (pour vérifier que l'électronique ne prend pas trop de place par rapport à la batterie)

C'est bon tout ferme !
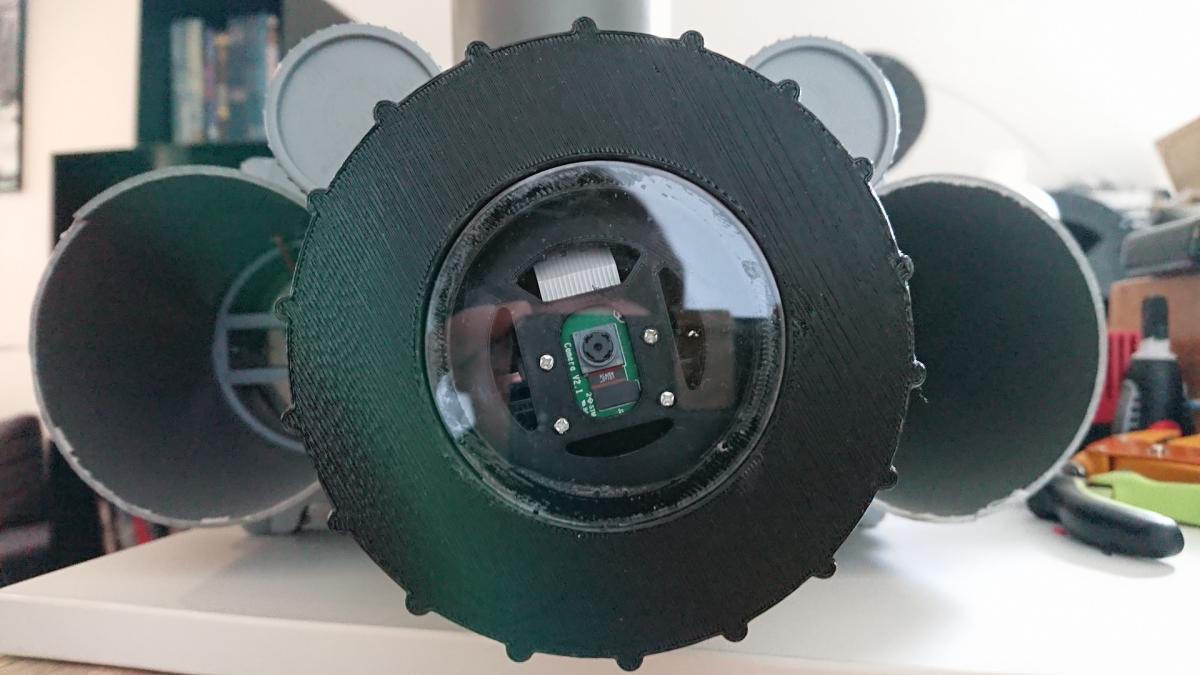
Coucou ! (c'est pas droit, je sais j'arrangerai ça plus tard)
Vu de l'arrière
Le cerveau du sous-marin est constitué d'une Raspberry Pi 3 B+ (pour assurer la liaison Ethernet avec la surface et encoder la vidéo) avec un shield Arduino (de marque DFrobot) (pour gérer les PWM à envoyer au contrôleur des moteurs et éventuellement s'interfacer avec les capteurs si j'en ajoute). Un contrôleur de moteurs pour quadcopter est connecté à une batterie LiPo 4S et assure le contrôle des moteurs (seulement 3 moteurs sont utilisés) et la fourniture d'un rail d'alimentation 5.2 V, 3A pour la Raspberry Pi. La caméra est la V2 de la caméra pour Raspberry Pi.
Maintenant que la mécanique est provisoirement terminée (en attendant les résultats des essais d'étanchéité), il faut que je m'attaque à la programmation. Encore un semaine de vacances à y consacrer, je tiens le bon bout.
Membre occasionnel
Posté 11 mai 2022 - 07:18
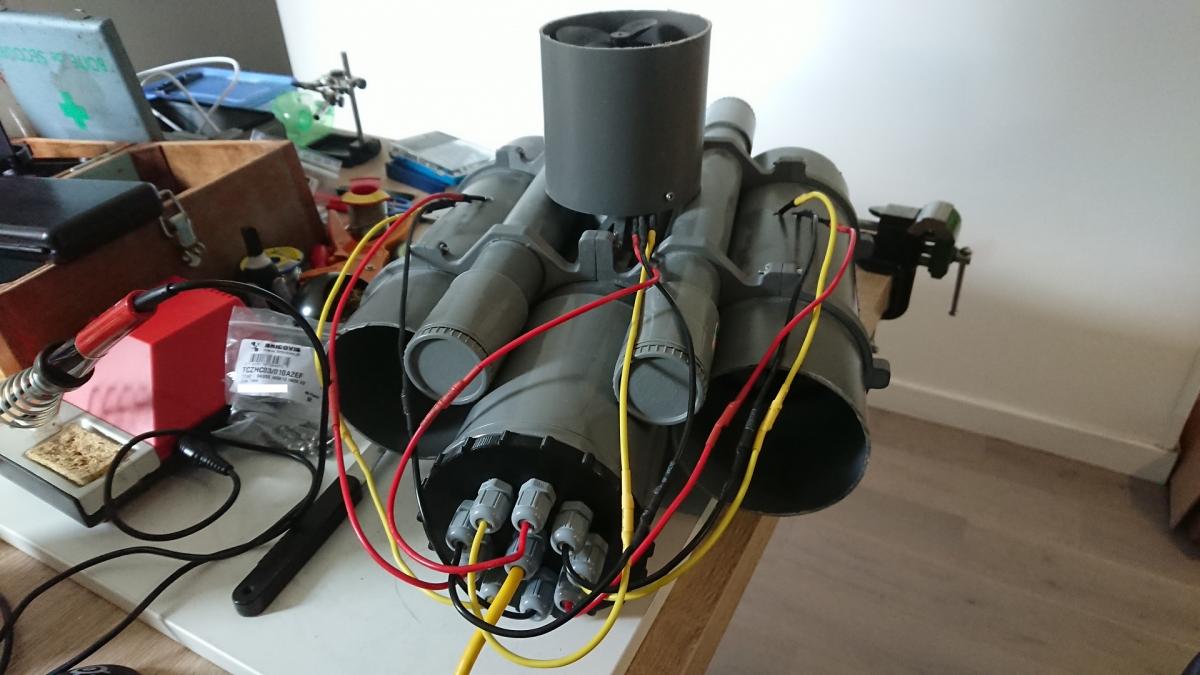
Alors que mes congés approchent de leur fin, LYS approche de la complétude. La première version du code est quasi-terminée (faut dire que y'avait pas grand chose à faire). Donc la Raspberry stream un flux vidéo de sa caméra, lisible avec VLC sur un autre ordinateur, et reçoit les commandes d'un autre PC. Les commande sont assez simple :
- 'z' pour avancer ;
- 'q' pour tourner à gauche ;
- ''d pour tourner à droite ;
- 'w' pour descendre ;
- 'a' pour remonter.
Reste à programmer l'Arduino pour qu'elle transforme les commandes Serial en PWM (facile) et à faire en sorte que la Raspberry envoie les commandes qu'elle reçoit vers l'Arduino (ce qui peut me prendre entre 30 s et 6000 ans selon l'état de la fonctionnalité, je hais la Raspberry pour toutes ces conneries d'implémentation).
Je vous laisse avec une photo de LYS sur son banc de programmation au pied de mon bureau.

Pilier du forum

Posté 11 mai 2022 - 10:07
Bel avancement!
Juste une petite remarque : à ta place, je rajouterais en plus une touche pour reculer : c'est certes pas le plus précis (surtout que sauf erreur de ma part, tu n'as pas de caméra à l'arrière), mais si tu te retrouve avec une parroi juste devant le robot, je ne suis pas sur que tu puisses repartir sans marche arrière. Ou si le câble s'accroche quelque part
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Pilier du forum
Posté 12 mai 2022 - 09:54
Tu est sur que tu ne peux pas inverser le sens de rotation?
Il me semble qu'au moins certains moteurs de drones peuvent être configurés pour tourner dans un sens ou dans l'autre (généralement, la moitié des moteurs tournent dans un sens, l'autre moitié dans l'autre). Il me semble que la configuration se fait au niveau de l'ESC ou au niveau du signal envoyé à celle-ci.
Si l'ESC ne supporte pas l'inversion, mais que le moteur en lui-même la supporte, alors il y a peut-être moyen d'utiliser des relais pour faire tourner dans l'autre sens (à voir si ça se fait sur un brushless).
Sinon, éventuellement prévoir un petit moteur uniquement pour reculer (à placer à l'arrière, au milieu, au dessus du tuyau de l'électronique, derrière le tuyau de l'hélice verticale). Car vu que tu n'as pas non plus d'hélices sur les cotés pour tourner, tu ne pourra faire demi-tour qu'en faisant un grand cercle : ça fait l'affaire si tu veux observer les poissons en pleine eau, mais dès que tu te rapproche des bords, tu es très vite piégé.
D'ailleurs, tu gères comment la montée/descente avec une seule hélice si tu ne peux pas changer de sens? Tu prévois un robot beaucoup plus denses (ou beaucoup moins dense) que l'eau de manière à avoir un déplacement vertical 'par défaut' qu'il faut contrer en permanence avec l'hélice verticale?
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre occasionnel
Posté 12 mai 2022 - 10:25
On peut inverser le sens de rotation des moteurs en échangeant 2 phases mais c'est un changement de branchement en interne, tu ne peux pas le faire lorsque tu es en plongé. Et il n'y pas vraiment la place pour ajouter un moteur (faudrait créer 3 passages de câbles supplémentaires) ou des composants supplémentaires pour faire un inverseur (ça rentre déjà tout juste à l'intérieur).
Oui il y a un sens par défaut : le sous-marin est équilibré de manière à ce qu'en l'absence de poussée vers le bas il remonte tout seul à la surface. C'est une mesure de sécurité en cas de coupure de courant.
Tant pis je me limiterais à la pleine eau.
Pilier du forum

Posté 12 mai 2022 - 08:07
Tant pis je me limiterais à la pleine eau.
Mais non !
Il existe des ESC bidirectionnels. En gros cela fonctionne comme un servo à rotations continus.
Voici 2 liens :
https://fr.aliexpres...15415433266!sea
https://fr.aliexpres...24192888183!sea
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre occasionnel
Posté 13 mai 2022 - 08:17
Mais non !
Il existe des ESC bidirectionnels. En gros cela fonctionne comme un servo à rotations continus.
Voici 2 liens :
Merci pour les liens. Le problème n'est pas de trouver la pièce, c'est juste que le contrôleur que j'ai actuellement n'a pas la fonctionnalité. Je l'avais choisi à l'époque car il avait l'énorme avantage de rassembler 4 ESC en un seul. C'est beaucoup plus compact (et propre) pour faciliter le montage. Mais si je fais une V2 dans quelques temps, assurément je considèrerais l'achat d'ESC avec la fonction reverse.
Membre occasionnel
Posté 15 mai 2022 - 05:40
J'ai fait les essais d'étanchéité ce week-end et j'ai trouvé au moins 3 endroits où ça fuit :
- la jonction entre le hublot et le bouchon sur lequel il est monté;
- le joint du bouchon sur lequel est monté le hublot à l'avant;
- le joint du bouchon d'un des petits tuyaux (prévus pour contenir du lest).
Pour essayer de régler le problème je vais remplacer les joints des bouchons par des plus épais et je vais chercher un truc pour étanchéifier le hublot. La bonne nouvelle c'est qu'il n'y a aucune fuite au niveau des passages de câbles
Membre occasionnel
Posté 18 septembre 2022 - 10:06
Pour ceux que ça intéresserait : quelqu'un s'est lancé dans "presque" le même projet (mais avance beaucoup plus vite) sur Thingiverse :
https://www.thingive...m/thing:2934890
Et moi pendant ce temps la je cherche comment assurer l'étanchéité...









Sujets généraux →
Electronique →
Besoins de conseils : construction d'un enregistreur sous-marinDébuté par Bacab , 13 janv. 2019 |
|
|
0 members, 0 guests, 0 anonymous users
 )
)









{kind=link}