J'ai commencé à traiter le problème de l'adaptation des servos RC aux Lego. Les servos Lego manquant de puissance pour cette réalisation.
Voici donc mon premier essai avec le servo JX RD-B7640HV-360 ayant un couple de 40kg.cm,
https://www.robot-ma...0-de-jx-40kgcm/, ici c'est la version 360° à rotation continue.
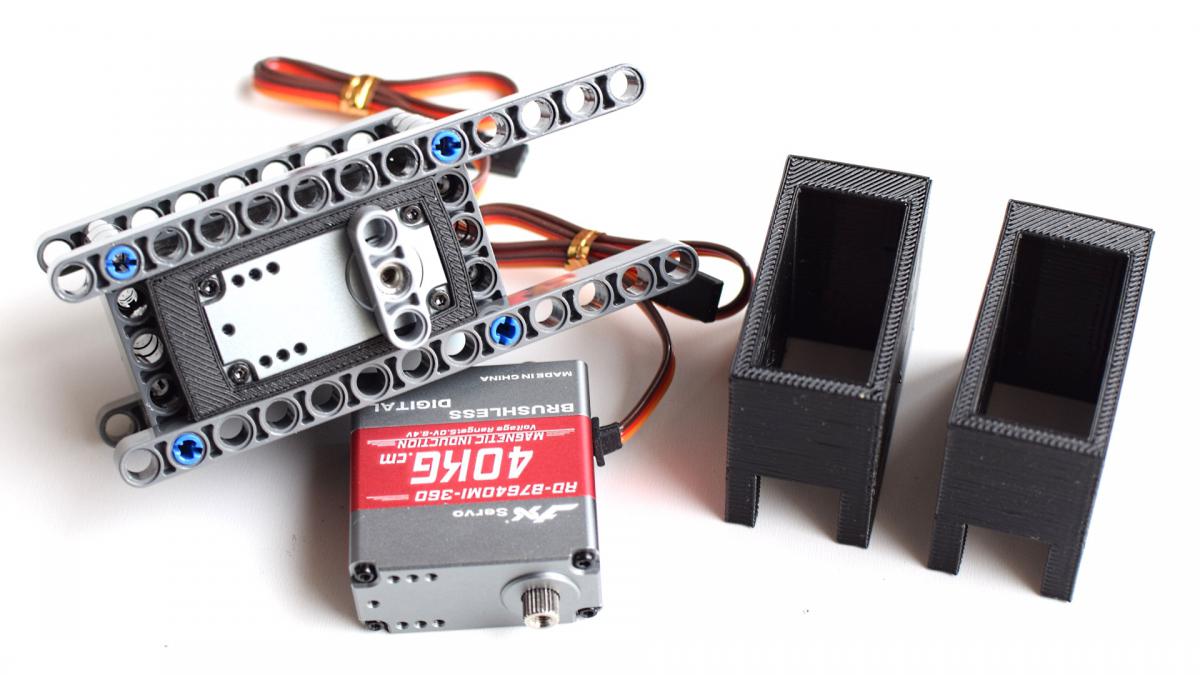
Pour l'adaptation aux alignements Lego, j'ai eu l'idée de faire une "chaussette" en NinjaFlex.
Cette "chaussette" ne possède pas de trous d'adaptation pour ne pas me contraindre à un montage spécifique. L'idée, c'est d'utiliser l'élasticité du NinjaFlex pour bloquer le servo. Pour augmenter encore le blocage, j'ai surdimensionnées les cotes internes et externes de 0,5mm.
Sur la photo, on voit un exemple de montage et on peut constater que le servo ne risque pas de bouger. Dans le pire des cas, je pourrai toujours bloquer le servo avec des pièces Lego. Je ne suis pas inquiet.
Notez l'alignement du palonnier avec les trous Lego. Pour mémoire, le pas Lego est de 8mm.
Le servo mesure 20x40x40 ce n'est qui pas trop mal, malheureusement l'axe est centré à 10mm, ce qui est normal, mais crée le plus gros problème.
Il faut bien comprendre que les problèmes d'alignements doivent se résoudre dans les 3 dimensions X, Y et Z
Cliquez moi.