

Je me suis lancé dans un projet: créer un robot pouvant mêtre utile, par example pour pouvoir me tenir des choses quand je soude, faire le tri dans mes affaires. Mais aussi, pour une utilisation plus sérieuse, il ma ete proposé de créer un robot pouvant prendre des mesures dune sphere et à partir de ces mesure, à laide dun objet de could, rectifier les impuretés de celle ci.
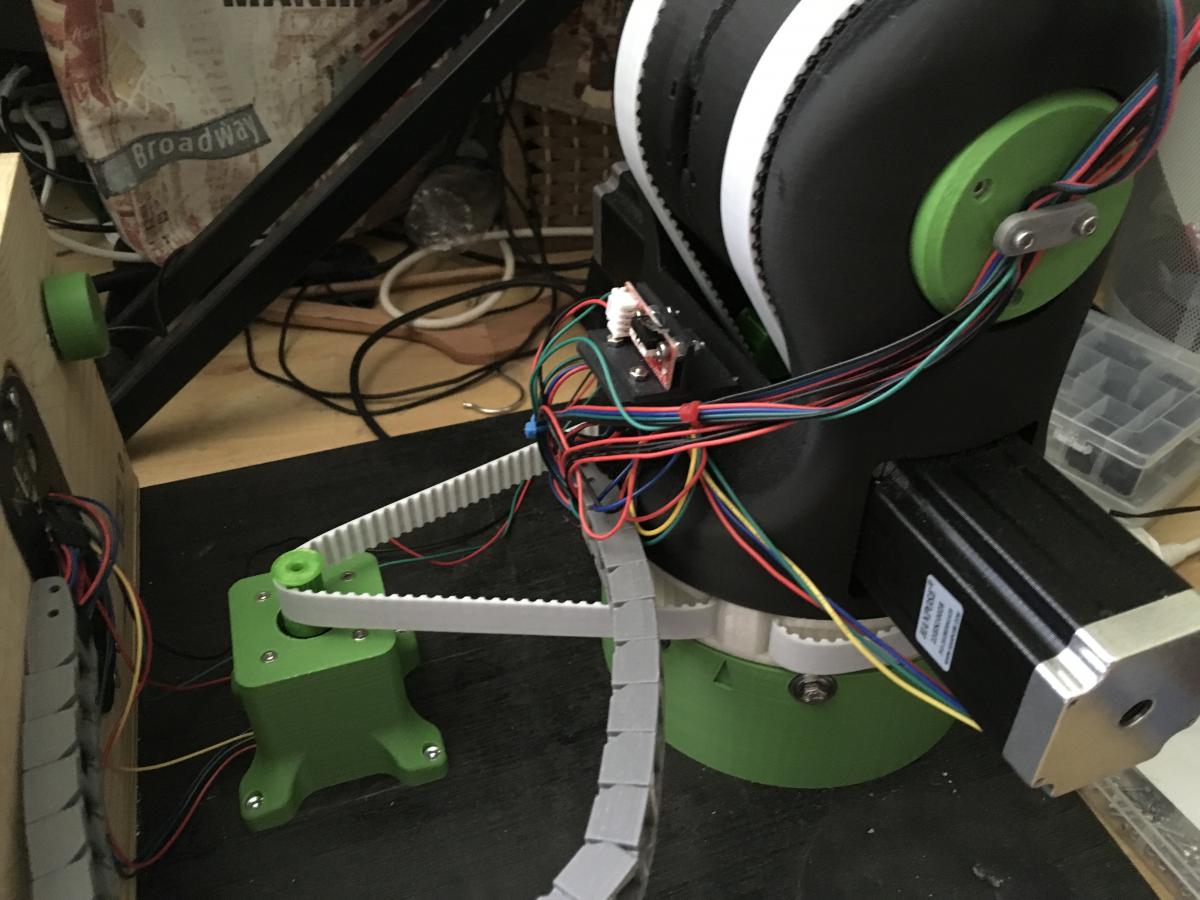
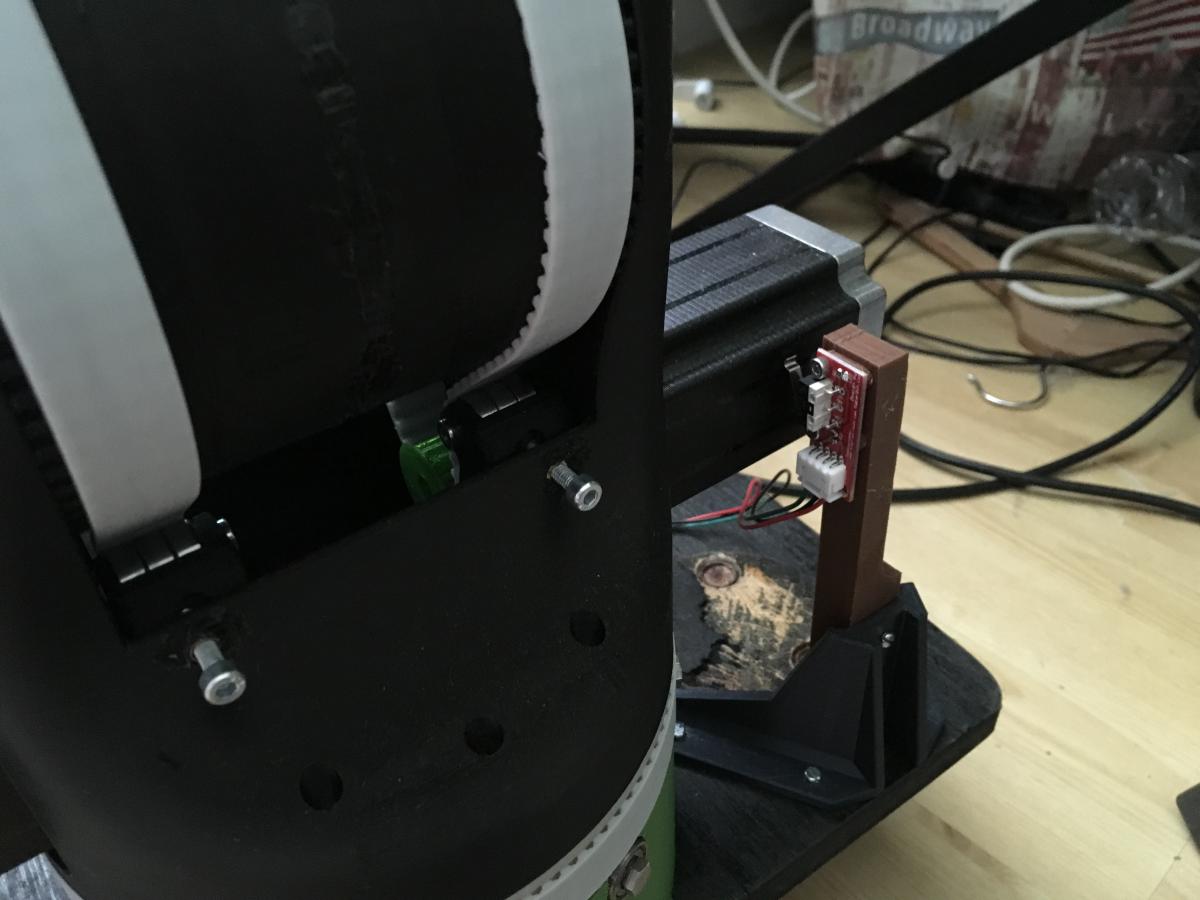
Jai donc choisi le bcn3d moveo comme base robotique, les degrés de liberté sont suffisant, jai trouvé une variante améliorée : https://roboteurs.co...s-robot-arm-kit
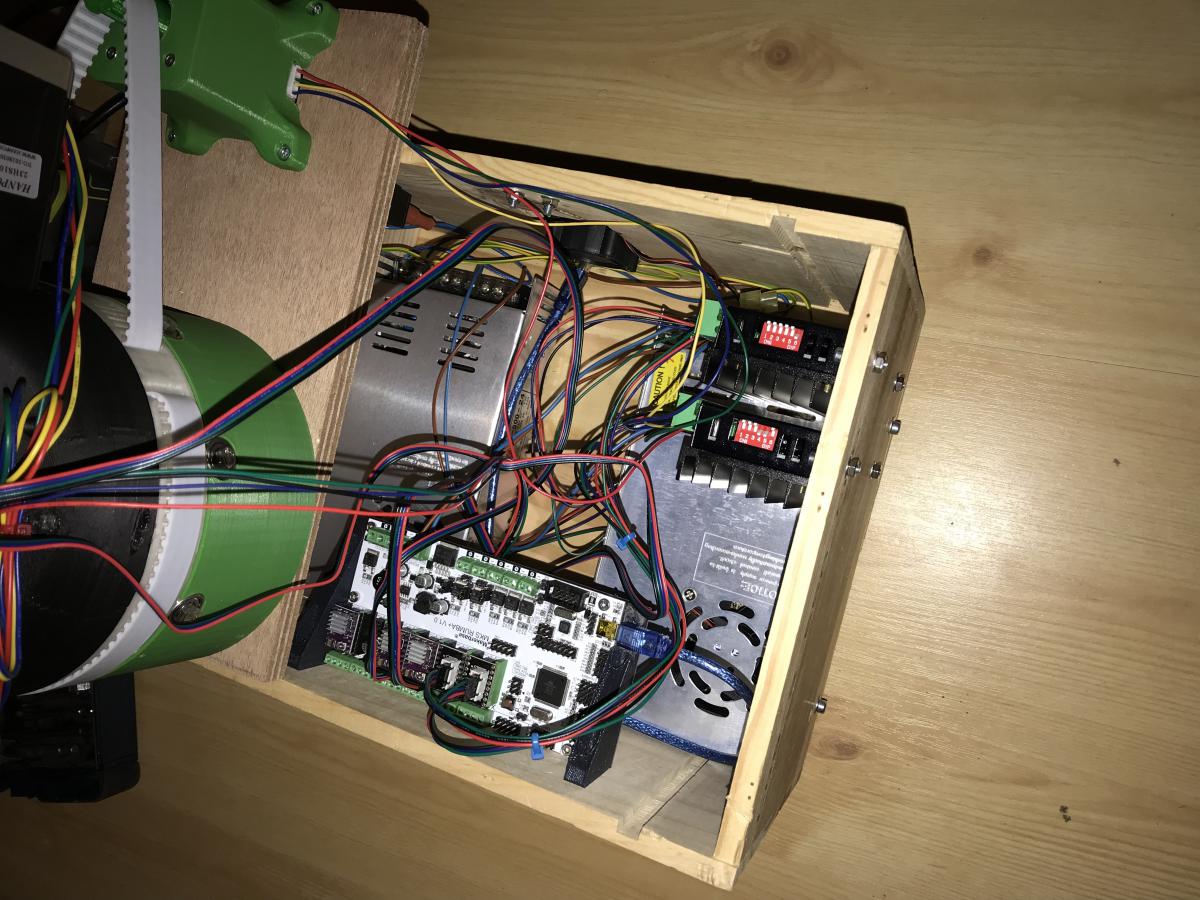
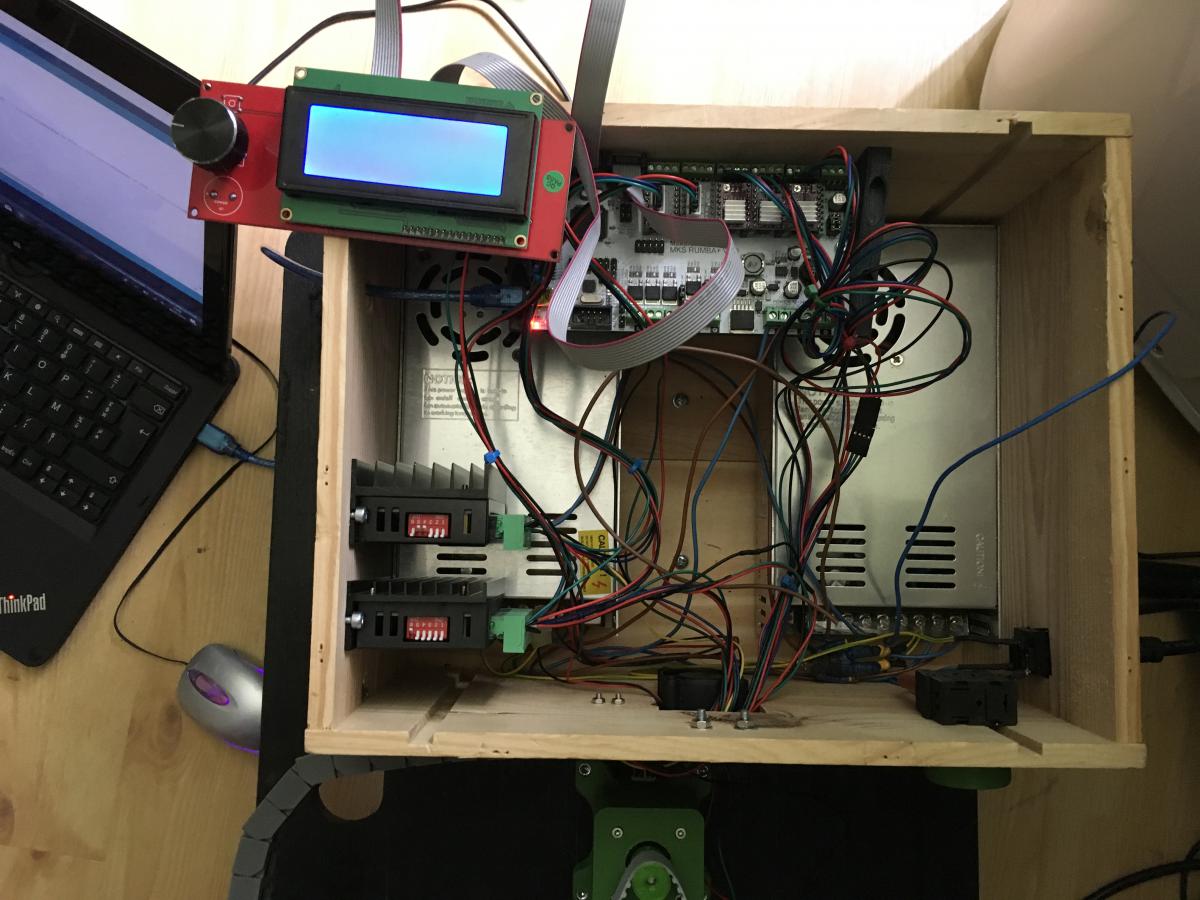
Pour ce qui est du bras, il doit pouvoir embarquer en bout du dernier axe un laser et un télémètre. Tout ceci commandé par une rumba et un pc qui lui sera dédié.
Je suis donc à la recherche dun firmware qui aurait déjà été commancé, à partir du quel je pourrais donc me baser et y ajouter toutes mes données. Je travaille en parallèle sur un logiciel un peu comme celui créé par Chris Annin pour son Ar2 : https://github.com/Chris-Annin/AR2
Je vous met quelques photos du robot, inprimé en pla qui sera au fur et à mesure du temps fait en petg. Nhésitez pas à donner vos avis


























![Kit bras rotatif et pince robot [testé par mthibs] - dernier message par Oracid](https://www.robot-maker.com/forum/uploads/profile/photo-4987.jpg?_r=1471451610)




