monter le stylo tu peux éventuellement tout simplement monter tout ce bloc ...
Même pas obligé de le monter à la vertical, juste besoin d'une liaison pivot ...
Par contre du coup la position 0 tu la mets manuellement ou ça se fait automatiquement ?
En tout cas c'est un beau design =) Tu l'as fait avec quel logiciel ?


Bras Robot dessin
Débuté par
Budet
, avril 02 2019 12:44
62 réponses à ce sujet
#41

Mike118
-

- Administrateur
-

- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 13 août 2019 - 04:01
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#42
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 13 août 2019 - 04:12
Ouais j'y avais pensé de faire lever/pivoter l'ensemble mais le problème c'est que je n'ai qu'un petit servo tout pourris pour réaliser cette fonction donc plus trop de choix  Je vais tester cette option et si ça marche pas je changerais
Je vais tester cette option et si ça marche pas je changerais 
Pour l'instant je le mettrait à la main, c'est pas aussi simple que sur une imprimante 3D avec des contacteurs parce qu'ils connaissent forcément le sens de rotation pour arriver en buté. Moi c'est plus complexe car c'est la combinaison des deux qui donnent une position donnée et il faut impérativement éviter les collisions entre les bras et/ou le bâtit.
Merci mais niveau design c'est rudimentaire, c'est pour l'instant purement fonctionnel. Une fois que j'aurais enmagaziné suffisamment de connaissance sur le sujet je repartirai de 0 cette fois ci en me filmant histoire d'avoir une vidéo cool et de montrer le processus de conception/réalisation
#43
Oracid
-

- Modérateur
-
- 6â¯768 messages
Pilier du forum
- Gender:Male
Posté 13 août 2019 - 08:36
Comment as-tu déterminé l'écartement des 2 servos.
Personnellement, sur mon quadrupède, j'ai conclu que l'écart entre les servos devaient être le plus petit possible.
Mais peut-être veux-tu faire un type Scara, mais dans ce cas pourquoi bloquer le passage entre les servos ?
Pour monter le stylo, il existe des servos de moins de 2g, https://www.banggood...ur_warehouse=CN
Personnellement, sur mon quadrupède, j'ai conclu que l'écart entre les servos devaient être le plus petit possible.
Mais peut-être veux-tu faire un type Scara, mais dans ce cas pourquoi bloquer le passage entre les servos ?
Pour monter le stylo, il existe des servos de moins de 2g, https://www.banggood...ur_warehouse=CN
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#44
Mike118
-
- Administrateur
-
- 9â¯965 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 13 août 2019 - 08:57
Il y a aussi les micro "linear servo" qui peuvent être utile =)
Course faible mais tu as pas besoin de plus =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#45
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 13 août 2019 - 08:57
Alors oui je suis d’accord pour l’espacement mais dans mon cas je les aient espacé de façon à ce que es deux bras bleus ne rentrent pas en collision l’un avec l’autre. J’ai testé plusieurs configurations c’est celle qui me donne la plus grande surface utile. J’imagine que dans ton cas tu as besoin de couvrir une certaine zone qui te permet d’occulter ces soucis de collisions
J’ai exactement ce servo, je vais voir ce que ca donne
J’ai exactement ce servo, je vais voir ce que ca donne
#46
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 13 août 2019 - 09:04
Le fait davoir bloqué le milieu est que je ne peux pas faire passer le stylo dun côté à lautre sans occasionner de collision. Du coup je me restreint à un côté ce qui est pas dérangeant car peu de dessein nécessiterait de les réaliser à 360
#47
Oracid
-
- Modérateur
-
- 6â¯768 messages
Pilier du forum
- Gender:Male
Posté 14 août 2019 - 07:24
Je comprends.Alors oui je suis d’accord pour l’espacement mais dans mon cas je les aient espacé de façon à ce que es deux bras bleus ne rentrent pas en collision l’un avec l’autre.
https://www.robot-ma...1502-de-goteck/
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#48
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 14 août 2019 - 11:07
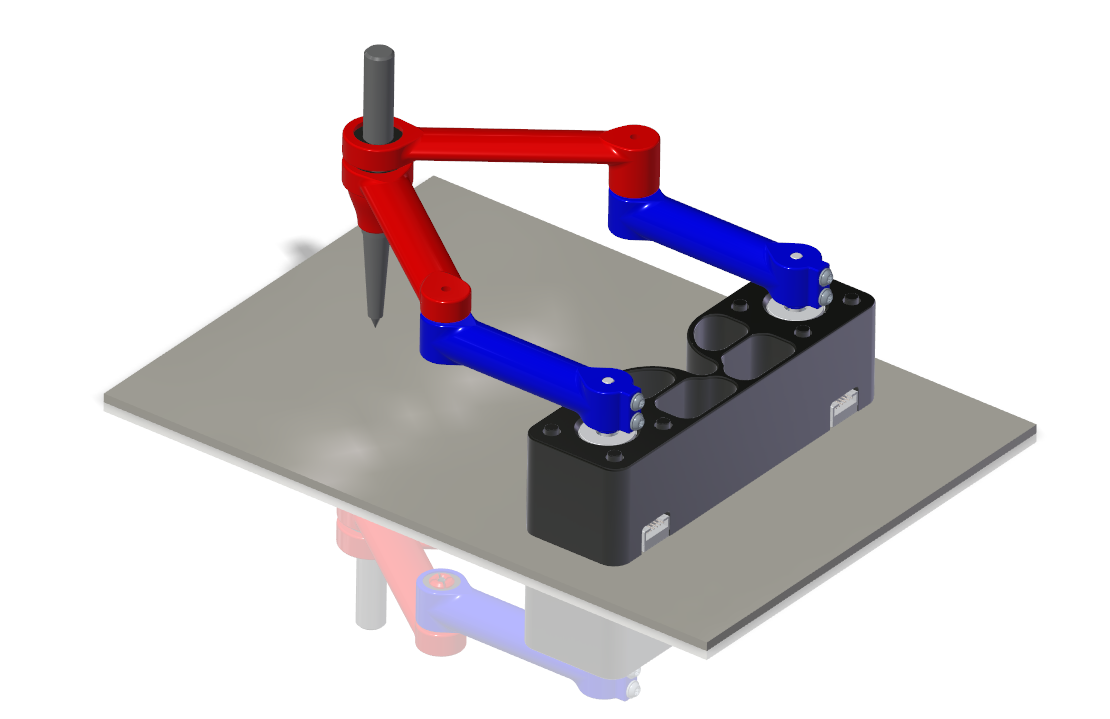
Jai enlevé le contre poids pas esthétique hier soir, je vais plutôt visser le robot sur une planche de bois format A4 sur laquelle je pourrais aussi fixer toute lélectronique facilement. Ça me fera du coup un petit robot scrib qui tiendra sur une page A4.
Désolé pour le rendu plus que moyen, le soft que jutilisais avant a compris quil avait été pi***é du coup je fais avec les moyens du bords ^^
Désolé pour le rendu plus que moyen, le soft que jutilisais avant a compris quil avait été pi***é du coup je fais avec les moyens du bords ^^
Image(s) jointe(s)
#49
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 19 août 2019 - 09:49
Nouveau jouet !
Rien à voir avec la marque Dagoma, cette ender 3 est deux fois moins cher et est incroyablement plus précise/pratique que la disco easy 200.
Bref, le première pièce est lancée, je vous tiens au courant de la suite
Image(s) jointe(s)

- Path et Romaric aiment ceci
#50
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 23 août 2019 - 11:12
Bonjour, quelques rapides photo avant daller me coucher. La mécanique est enfin finie !
Jai réussis avec très peu déléments mécaniques et seulement une imprimante 3D a avoir un résultat super rigide et sans friction ! Je suis satisfait de cette philosophie de meca !
Ya plus quà lui donner vie première mission : dessiner un carré !
Jai réussis avec très peu déléments mécaniques et seulement une imprimante 3D a avoir un résultat super rigide et sans friction ! Je suis satisfait de cette philosophie de meca !
Ya plus quà lui donner vie
première mission : dessiner un carré !
Image(s) jointe(s)



- Melmet , Mike118 , macerobotics et 2 autres aiment ceci
#51
Oracid
-
- Modérateur
-
- 6â¯768 messages
Pilier du forum
- Gender:Male
Posté 24 août 2019 - 06:23
Fais moi plaisir !
Vire ta planche à découper et va me chercher un bout de planche chez Leroy/Casto. 
- Melmet aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos


#53
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 24 août 2019 - 08:38
Ahah, je n’ai pas encore la planche j’ai voulu faire illusion ^^
Pas bête l’option découpe de saucisson !
Je me demandais, mon approche ne t’intéresserais pas Oracid ? L'idée ici pour toi serait de déterminer n’importe qu’elle trajectoire de marche et ensuite mon programme te déterminerait les angles de tes moteurs pour la respecter plutôt que inversement
Pas bête l’option découpe de saucisson !
Je me demandais, mon approche ne t’intéresserais pas Oracid ? L'idée ici pour toi serait de déterminer n’importe qu’elle trajectoire de marche et ensuite mon programme te déterminerait les angles de tes moteurs pour la respecter plutôt que inversement
#54
Oracid
-
- Modérateur
-
- 6â¯768 messages
Pilier du forum
- Gender:Male
Posté 24 août 2019 - 09:48
Et oui, bien sûr que cela m'intéresse.Je me demandais, mon approche ne t’intéresserais pas Oracid ? L'idée ici pour toi serait de déterminer n’importe qu’elle trajectoire de marche et ensuite mon programme te déterminerait les angles de tes moteurs pour la respecter plutôt que inversement
D'autant que je l'ai déjà fait ici, https://www.robot-ma...-nuls/?p=104801
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#57
Little french kev
-

- Membres
-
- 110 messages
Membre occasionnel
Posté 07 septembre 2019 - 12:04
Interessant . ca me rappel quelques vieux souvenir de classe de math mais je t'avourai que je serai incapable d'utiliser ces equations ( en tt cas sans avoir a potasser plusieurs heures avant) . Chapeau! . vivement la suite !
#58
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 15 octobre 2019 - 08:29
Bonjour à tous,
J'ai pas du tout avancé dernièrement faut vraiment que je me remotive c'est dur ! Pourtant j'ai vraiment envie de finir ce projet et d'enfin dessiner quelque chose avec ce bras
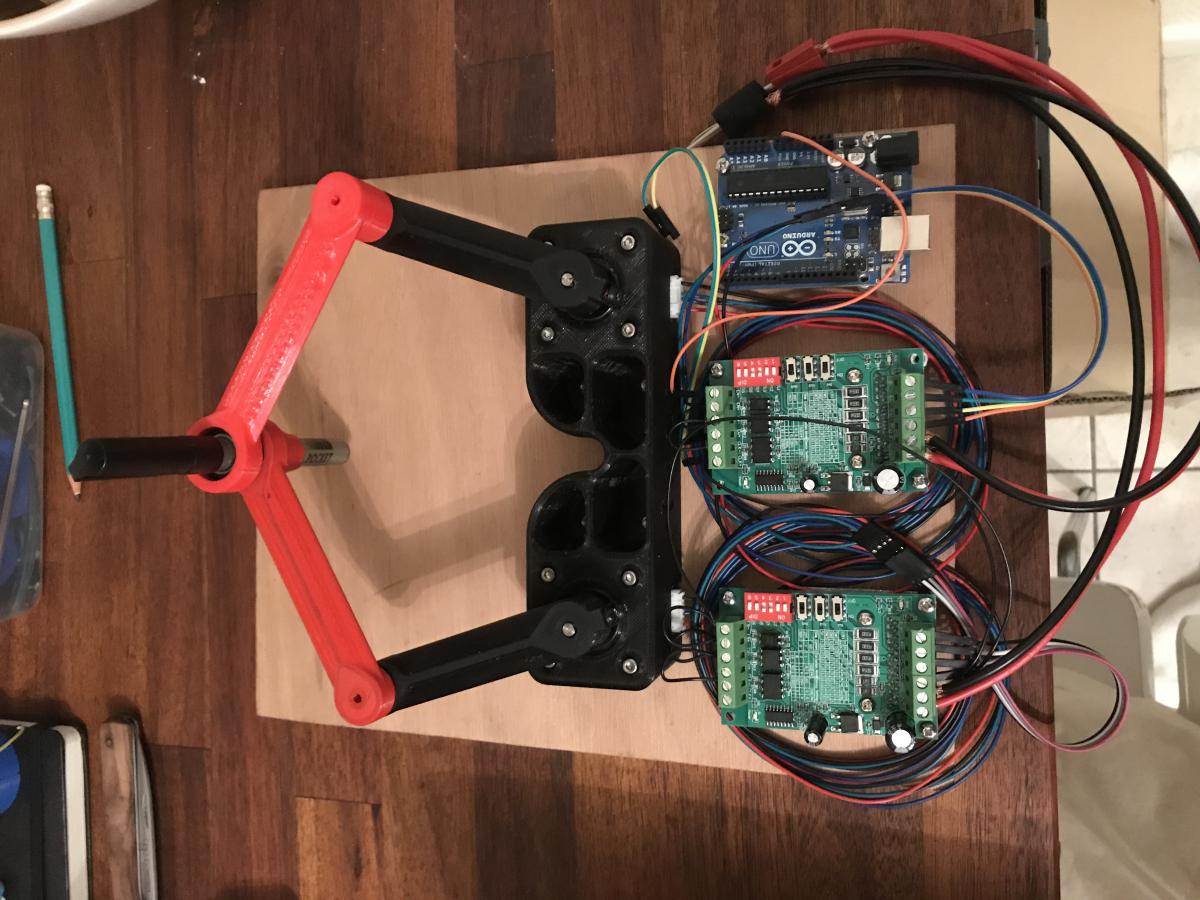
Le câblage électronique est complet, je vous laisse des petites photos, y'a plus qu'à coder ! miam
Image(s) jointe(s)

- Oracid , Melmet , macerobotics et 2 autres aiment ceci
#59
Budet
-
- Membres
-
- 366 messages
Membre passionné
- Gender:Male
- Location:69
Posté 27 octobre 2019 - 03:30
Bonjour,
Petite avancée sur le projet, j'ai testé si tout fonctionnait bien avec un petit programme rapide pour faire bouger les deux moteurs en simultané. Vous pouvez voir ce que ça donne suivant ce lien :
Je remarque déjà quelques problèmes :
Premièrement les fils des quatre phases des bobines chauffent énormément je ne me l'explique pas...
Deuxièmement le robot tremble pas mal alors que j'ai littéralement 0 jeux dans la mécanique c'est vraiment au niveau des moteurs :/
Si vous avez des idées je suis preneurs !
Merci à vous
Petite avancée sur le projet, j'ai testé si tout fonctionnait bien avec un petit programme rapide pour faire bouger les deux moteurs en simultané. Vous pouvez voir ce que ça donne suivant ce lien :
Je remarque déjà quelques problèmes :
Premièrement les fils des quatre phases des bobines chauffent énormément je ne me l'explique pas...
Deuxièmement le robot tremble pas mal alors que j'ai littéralement 0 jeux dans la mécanique c'est vraiment au niveau des moteurs :/
Si vous avez des idées je suis preneurs !
Merci à vous
- Little french kev aime ceci
#60
Oracid
-
- Modérateur
-
- 6â¯768 messages
Pilier du forum
- Gender:Male
Posté 27 octobre 2019 - 03:37
Super, ça bouge !
Désolé, je ne vais pas pouvoir t'aider.
Désolé, je ne vais pas pouvoir t'aider.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




