Bonjour,
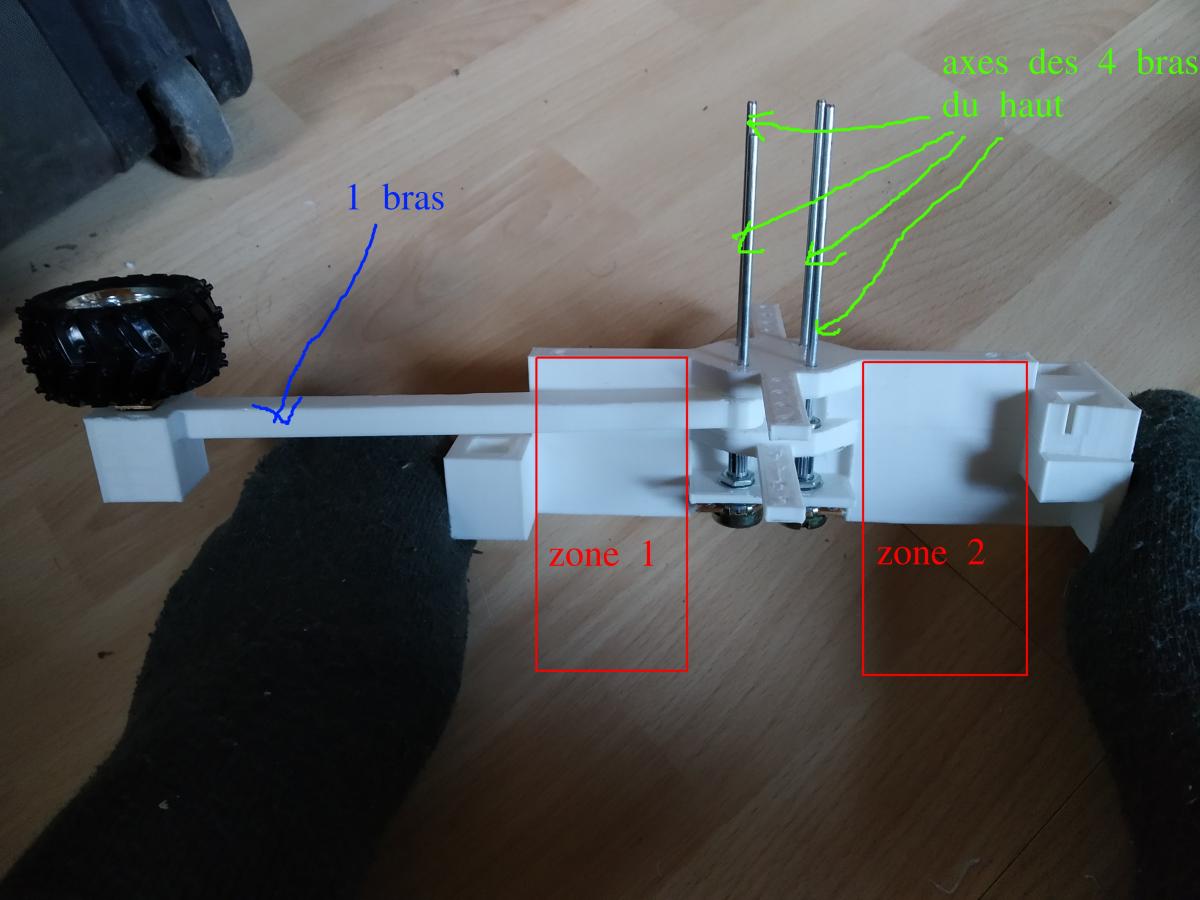
j'avance en ce moment sur le robot de spéléo, et j'hésite entre deux maux pour l'organisation du circuit électrique.
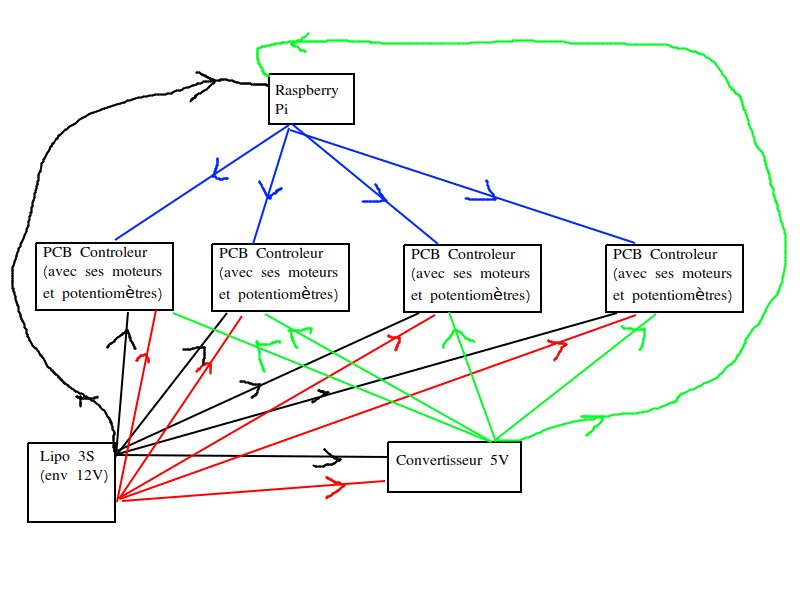
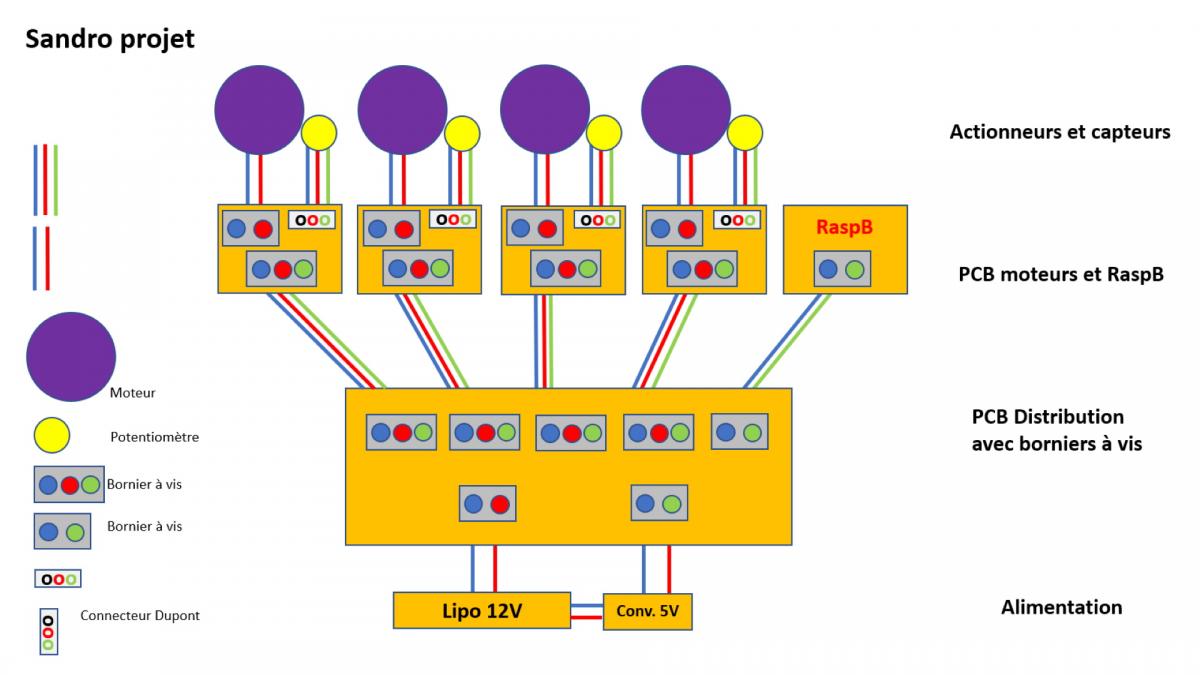
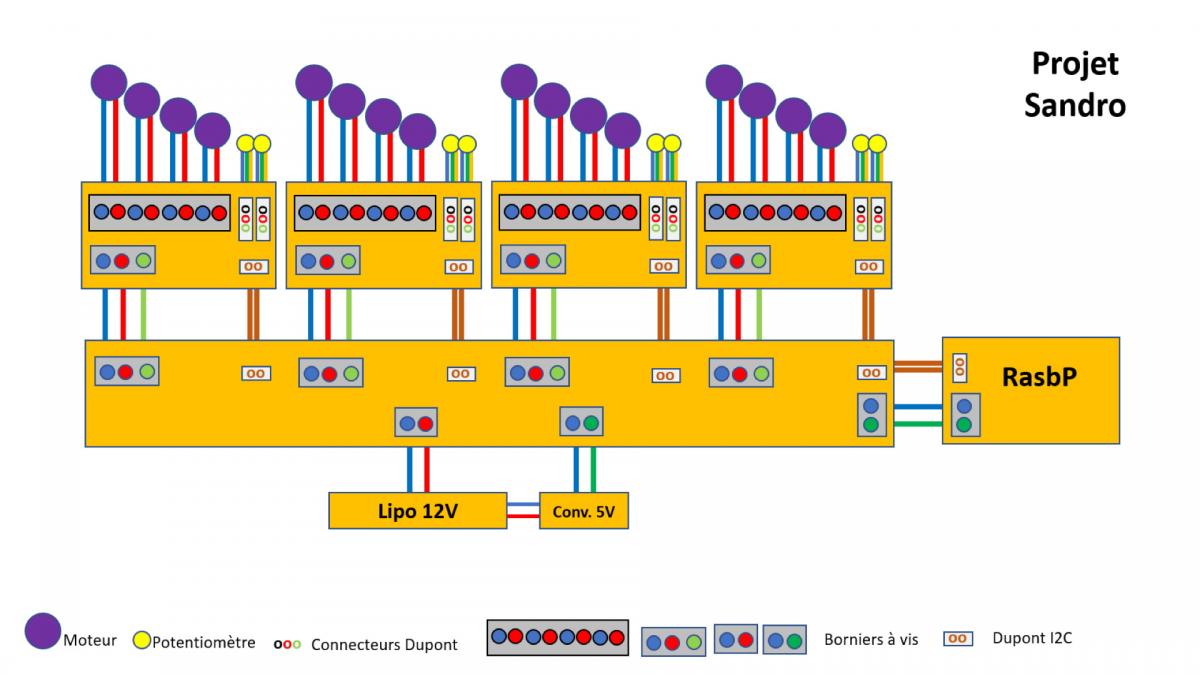
Au total, je vais avoir 16 moteurs (8 pour les bras, 8 pour les roues), commandés par 2 ou 4 PCBs, qui contiendront chacun un Atmega (probablement un 328P) et les ponts en H (+ de l'électronique de mesure de courant). Ces PCBs communiqueront en I2C avec un raspi.
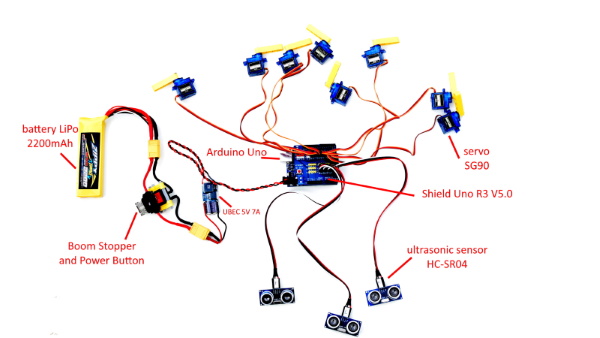
En plus de ça, j'aurais probablement un arduino sur un petit PCB pour les autres tâches, communiquant lui aussi en I2C.
Le problème, c'est que si l'un des 2 ou 4 PCBs contrôlant les moteurs n'est plus opérationnel (communication I2C ou alimentation interrompue), alors le robot est perdu. Si c'est un seul moteur qui a un problème, je pense qu'il reste récupérable.
J'hésite donc entre 2 stratégies :
1) Je fais un câblage classique "en étoile" (ie tous les bus I2C partent du raspi, tous les fils d'alimentation partent de la batterie/du convertisseur). C'est simple, mais il suffit qu'un unique fil ait un faux contact pour que le robot soit perdu.
Pour envisager cette solution, il faudrait des connecteurs vraiment fiables. Vous avez des suggestions? Vous avez une idée du risque de faux contact?
2) Je fais un câblage redondant en boucle : (par exemple pour l'I2C : raspi -> PCB1 -> PCB2 -> ... -> PCBn -> raspi). L'avantage est qu'un seul faux contact n'a aucune incidence. L’inconvénient est que j'ai des boucles à même potentiel (théorique) : pour ground, on appelle souvent ça des "ground loop", aucune idée s'il y a un nom pour quand on fait la même chose pour les tensions positives ou pour un signal comme l'I2C.
Je sais qu'en général on dit que les ground loop c'est le mal (ça a tendance à créer des différences de potentiel le long de la boucle), mais je n'ai aucune expérience de à quel point c'est grave.
Vous en pensez quoi, c'est acceptable ou pas?
Du coup, vous pensez que quelle solution est le moindre mal?
Merci d'avance
Sandro
PS : pour info, chaque moteur a un courant max de 1A (stall current), et il est bien possible que j'utilise une ou plusieurs antennes (dans un premier temps juste le wifi du raspi, mais probablement d'autres basse fréquence plus tard)