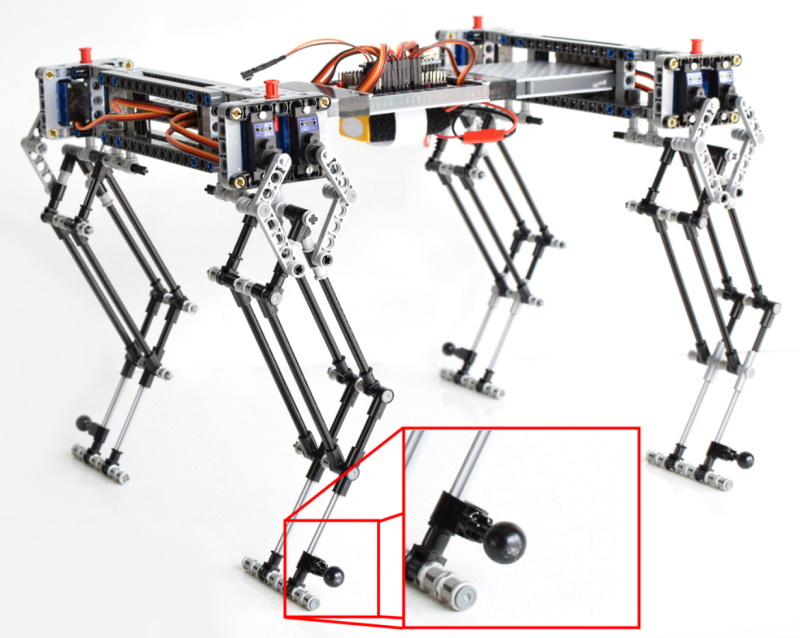

J'ai déjà proposé un mécanisme de 5 barres avec extension, https://www.robot-ma...nsion/?p=108116, mais je n'avais pas progressé dans ce sens. Peut-être par négligence, à moins que l'idée n'ait pas assez murie dans ma tête.
Bizarrement, ce mécanisme est assez rarement utilisé sur les quadrupèdes, alors que l'idée progresse sur les bipèdes comme celui de Disney Research ou de Columbia Engineering. Mais un bon exemple de quadrupède utilisant ce mécanisme, est le Space Bok de l'ETH de Zurich.
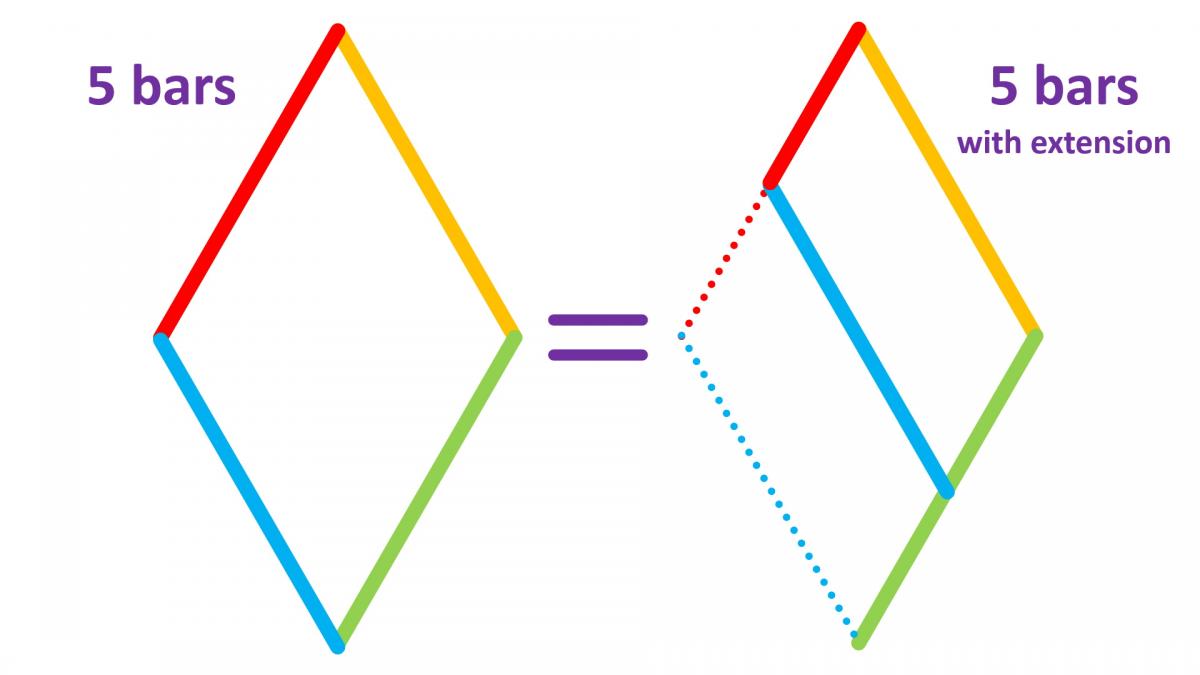
Dans une prochaine vidéo, j'essaierai de démontrer que le mécanisme à 5 barres est équivalent au 5 barres avec extension. Je veux dire par là que pour passer de l'un à l'autre, il n'y a aucune modification de calcul à faire.
J'ai déjà proposé cette démonstration dans ma précédente vidéo, mais je vais la refaire dans le cadre de ma future vidéo de ce nouveau quadrupède.
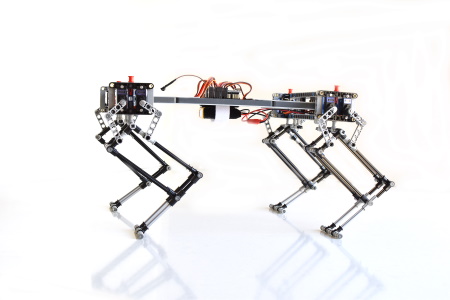
Je n'ai pas encore testé la vitesse de ce quadrupède, mais ça ne saurait tarder.
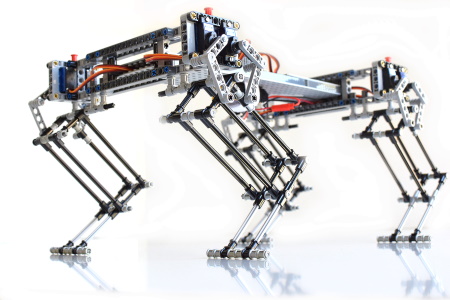
Quel est l'avantage de ce mécanisme par rapport à au 5 barres normal ? Je l'ignore, mais je trouve que l'on se rapproche plus de l'idée que l'on se fait d'un quadrupède.
C'est plus un choix esthétique et intuitif que rationnel.