Bonsoir,
Tant mieux si tu as trouvé.
Pour l'ordre d'extinction, je penses que ça ne posera pas de problème, mais si tu veux être ceinture et bretelles, je te suggère l'ordre d'extinction suivant :
1) (si pas d'urgence) arrêter le moteur progressivement depuis le logiciel : je penses que tu peux sans problème te passer de cette étape pour un moteur pas à pas sauf si tu as une grosse inertie et une grosse vitesse qui font qu'il continue à tourner après extinction
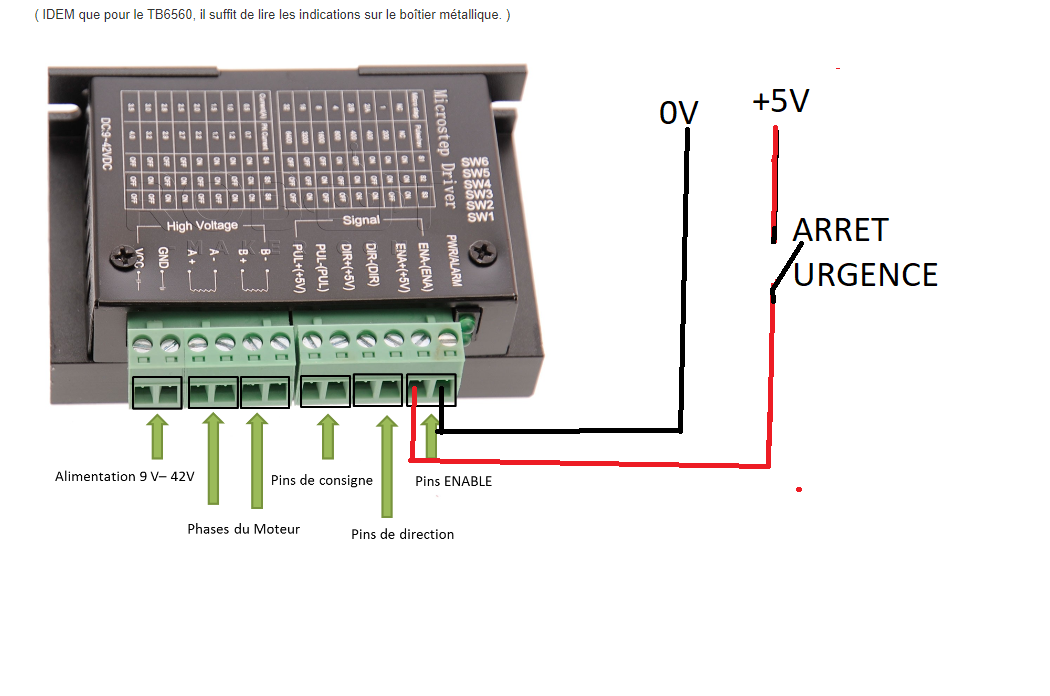
2) du le mets en mode DISABLE (en utilisant le bouton d'arrêt d'urgence)
3) tu coupe l'alimentation de l'arduino (comme ça, il n'y a aucun risque que les commandes de l'arduino endomagent le driver s'il n'est pas alimenté)
4) tu coupes l'alimentation du driver
Et pour rallumer
1) tu vérifie que le bouton d'arrêt d'urgence est enfoncé
2) tu alimentes le driver
3) tu alimentes l'arduino (le programme peut se lancer automatiquement, ou attendre un bouton en étape 5)
4) tu défait le bouton d'arrêt d'urgence
5) facultatif : tu utilises un bouton pour lancer le mouvement du moteur, si tu as décidé que le programme ne commence pas tout seul à l'étape 3.
Après, honnêtement, je penses que tu ne risques pas grand chose en éteignant "n'importe comment", surtout avec un moteur pas à pas. La seule chose que j'éviterais à la limite, c'est débrancher le moteur du driver pendant que le moteur est alimenté. Pour tout le reste, si c'était mon matos, je ne me casserais pas la tête.
PS : au final, il n'y a pas eut besoin de ton code, mais à l'avenir, évite des informations comme "le code bounce qu'on peut trouver sur internet" : il y a probablement 50 programmes différents sur internet qui s’appellent bounce, et je n'ai aucun moyen de savoir lequel est le bon (et honnêtement, j'ai aucune envie de chercher) : si tu veux une aide sur un code, poste le code (ou un lien vers le code)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.







 )
)