Merci ça à l'air effectivement plus simple et c'est parfait pour l'application que je veux

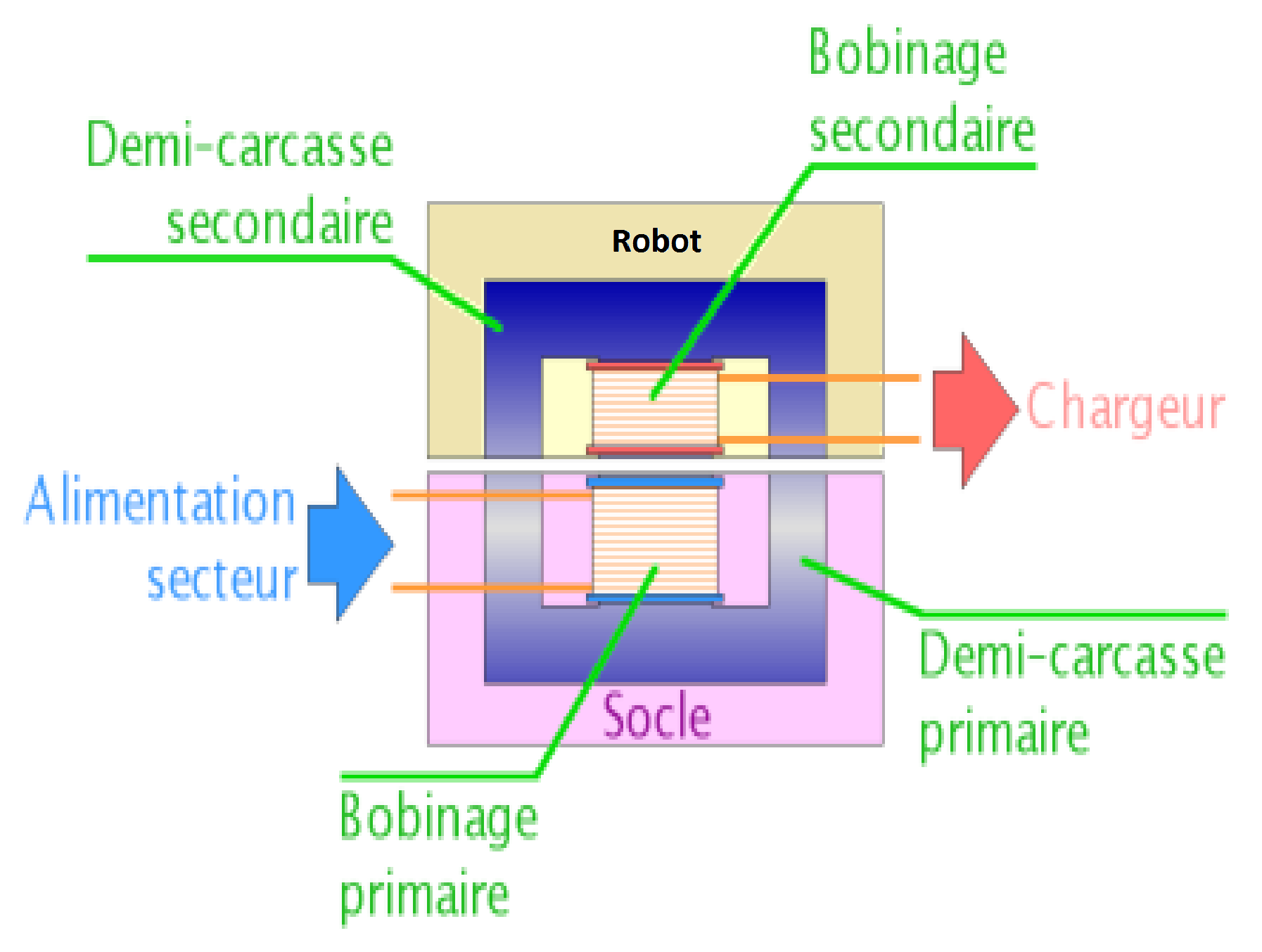
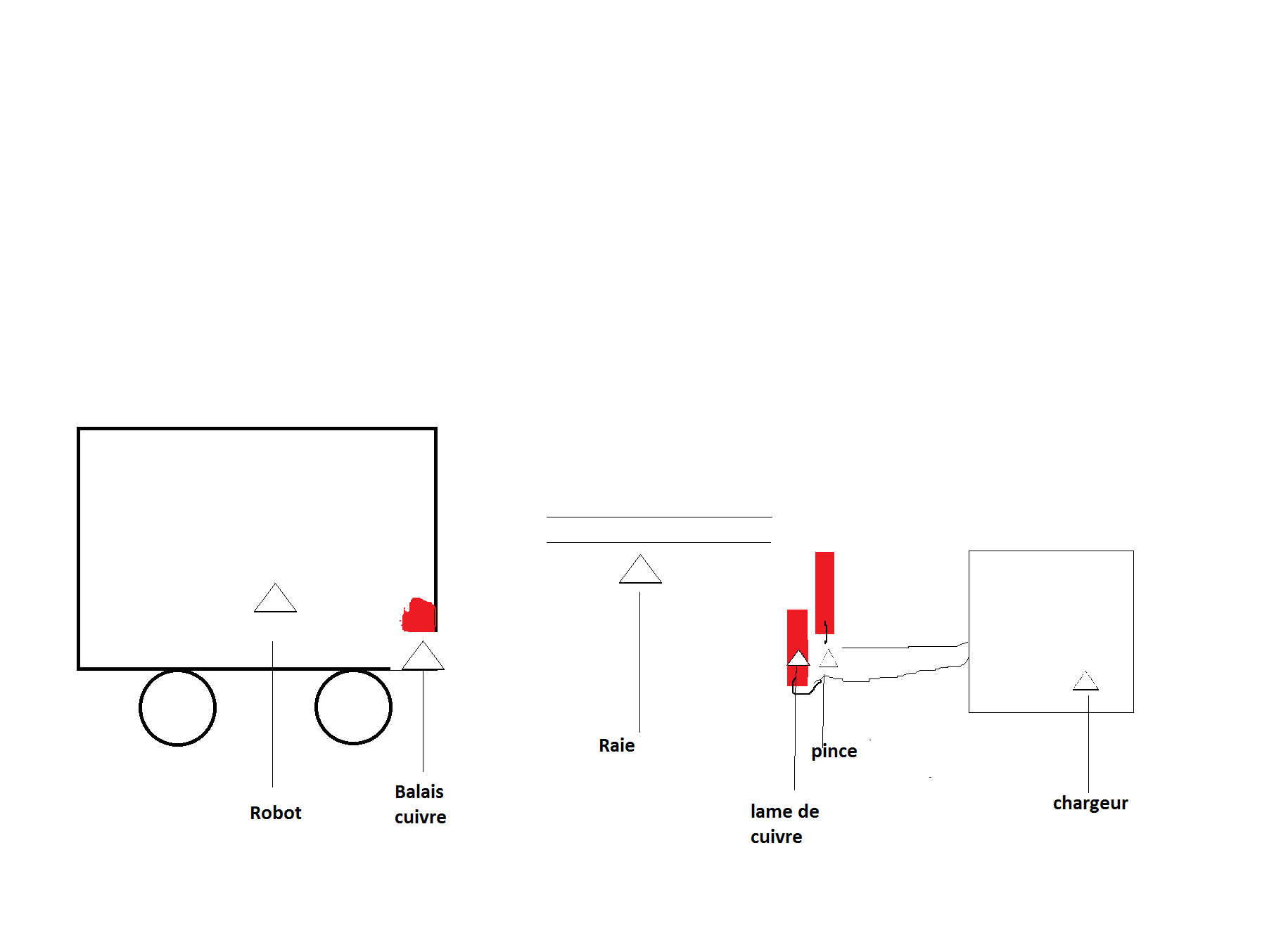
2 pistes en cuivre (2 lamelles en cuivre) sur le socle de recharge. 2 balais en cuivre dessous du robot ou sur le côté. Une mécanique astucieuse (système de rails) devrait te permettre de guider ton robot quand il atteint son socle, pour que les balais atteignent bien les lamelles.
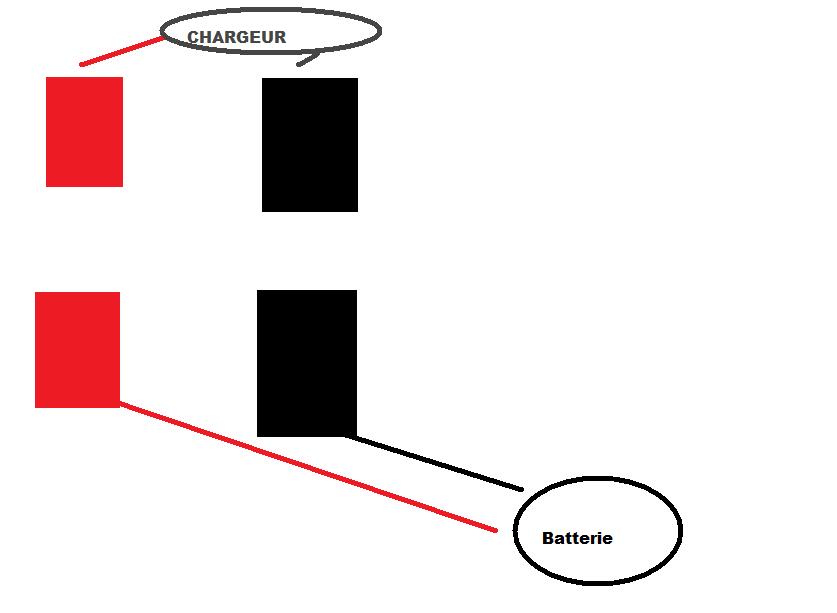
Ok mais juste les 2balais en cuivre déjà ça correspond à quoi, et comment je le relie à la batterie plomb ?
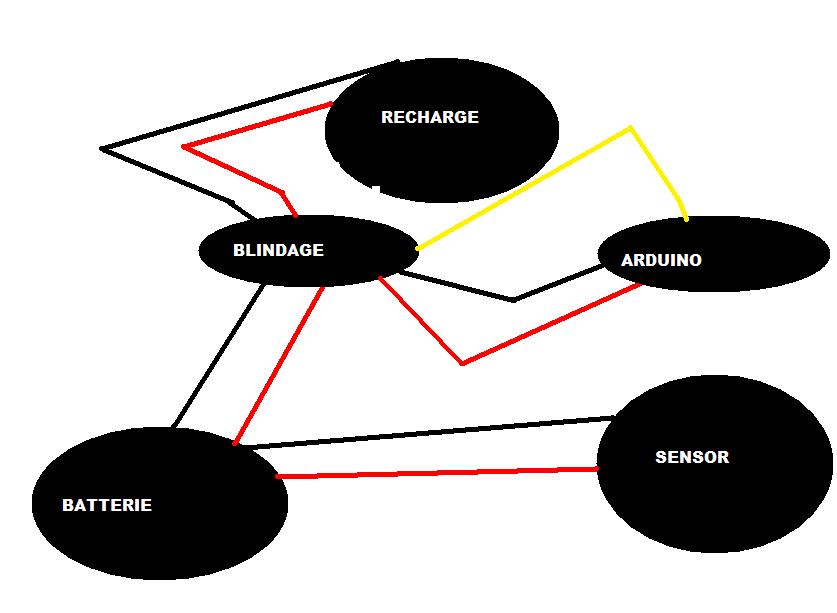
Attention, il faut impérativement que le chargeur intégré à ton socle soit équipé d'une protection contre les courts-circuits, car il est facile de court-circuiter des contacts "nus". Un fusible réarmable (polyswitch) fait l'affaire en général. On peut aussi faire des formes "intelligentes" autour de tes lamelles qui évitent les contacts intempestifs (rebords en matière isolante).
Donc il suffit juste de relié les lames de cuivres du socle au chargeur et de mettre juste avant les lames de cuivre du socle un fusible réarmable (polyswitch) ?


































{kind=link}