

Oui, tu peux l'utiliser comme tuteur pour les tomates 


188 réponses à ce sujet
#122

levend
-
- Membres
-

- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 19 octobre 2017 - 07:56
Notre terrain contient déjà assez de fer  .
.
Non mais l'oxydation n'est qu'en surface donc tout à fait utilisable mais pas pour n'importe quoi.
Edit : plus qu'à fixer le moteur et le second côté sera terminé, ce n'est pas e plus simple ...
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#123
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 20 octobre 2017 - 05:23
Pour une fois que le WIFI fonctionne dans mon atelier, je passe ici.
Donc le côté est remonté, y compris le moteur que j'ai même câble de manière très pro (un domino ) à une extrémité du câble, c'est du provisoire je vous rassure. L'autre extrémité du câble est branchée sur le driver qui lui même est relié à l'Arduino (pour les essais).
J'ai testé avec ce petit programme :
int dirpin = 3;
int steppin = 12;
// int enapin = ;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(dirpin, OUTPUT);
pinMode(steppin, OUTPUT);
// pinMode(enapin, OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
int i;
digitalWrite(dirpin, LOW); // Set the direction.
delay(1000);
// digitalWrite(enapin, HIGH);
// delay(100);
Serial.println(">>");
for (i = 0; i<4000; i++) // Iterate for 4000 microsteps.
{
digitalWrite(steppin, LOW); // This LOW to HIGH change is what creates the
digitalWrite(steppin, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(2000); // This delay time is close to top speed for this
} // particular motor. Any faster the motor stalls.
digitalWrite(dirpin, HIGH); // Change direction.
delay(1000);
Serial.println("<<");
for (i = 0; i<4000; i++) // Iterate for 4000 microsteps
{
digitalWrite(steppin, HIGH); // This LOW to HIGH change is what creates the
digitalWrite(steppin, LOW); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(2000); // This delay time is close to top speed for this
}
}
Le moteur ne tourne que dans un sens.
J'ai aussi essayé avec ce programme :
i
nt PUL=12; //define Pulse pin
int DIR=3; //define Direction pin
int ENA=5; //define Enable Pin
void setup() {
pinMode (PUL, OUTPUT);
pinMode (DIR, OUTPUT);
pinMode (ENA, OUTPUT);
}
void loop() {
for (int i=0; i<6400; i++) //Forward 5000 steps
{
digitalWrite(DIR,LOW);
digitalWrite(ENA,HIGH);
digitalWrite(PUL,HIGH);
delayMicroseconds(50);
digitalWrite(PUL,LOW);
delayMicroseconds(50);
}
for (int i=0; i<6400; i++) //Backward 5000 steps
{
digitalWrite(DIR,HIGH);
digitalWrite(ENA,HIGH);
digitalWrite(PUL,HIGH);
delayMicroseconds(50);
digitalWrite(PUL,LOW);
delayMicroseconds(50);
}
}
Le moteur ne tourne pas  .
.
Les entrées Dir et Pulse du drivers sont reliées respectivement au pin 3 et 12 de l'arduino, l'entrée Enable n'est pas branchée.
Je mettrai peut-être une vidéo ce soir.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#124
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 20 octobre 2017 - 09:36
La vidéo n'apporte pas grand chose :
J'aurais bien aimé que l'on puisse entendre le bruit du moteur lorsque qu'il ne tourne plus (et qu'il devrait tourner dans l'autre sens).
Edit : il y a-t-il une erreur dans le programme ?
P.S. : le moteur est alimenté en 24V seulement.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#125
ashira
-

- Modérateur
-
- 1â¯333 messages
Pilier du forum
- Gender:Male
Posté 20 octobre 2017 - 10:24
Pour ton 2eme code, si tu laisses enable à 0v ça fonctionne ?
Le bruit me fait penser à un problème de connection entre le moteur et le driver. Si c'est ça c'est risqué pour le driver!
Edit: dans ton 1er code, si tu mets aussi un delayMicroseconds (2000) entre les 2 digitalWrite() ça fait quoi ? Le bruit qu'on entend ça peut aussi être une fréquence trop élevée pour le moteur, essai en baissant la frequance pour voir.
Le bruit me fait penser à un problème de connection entre le moteur et le driver. Si c'est ça c'est risqué pour le driver!
Edit: dans ton 1er code, si tu mets aussi un delayMicroseconds (2000) entre les 2 digitalWrite() ça fait quoi ? Le bruit qu'on entend ça peut aussi être une fréquence trop élevée pour le moteur, essai en baissant la frequance pour voir.
#126
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 21 octobre 2017 - 01:42
Le Enable n'étant pas câblé, qu'il soit à 0 ou non ne va rien changer, demain je le câble et le met à 0.
J'ai respecter le câblage indiqué par le fabricant du moteur.
Demain, j'essaie en réduisant la fréquence.
Le but de ces tests est de tester la mécanique, de ce côté ça semble être bon, mais aussi l'électronique vu que j'ai déjà eu une alim neuve HS et tout provient d'un même lot, la seconde alim fonctionne mais ceux sont les alim pour les NEMA 23, je n'ai pas encore testé les deux alims pour les NEMA 34.
Edit : je teste tout à mesure pour m'éviter de perdre du temps à monter et démonter, j'ai déjà assez trainer 
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#127
Forthman
-

- Membres
-
- 1â¯382 messages
Pilier du forum
- Gender:Not Telling
- Location:Montauban (82)
Posté 21 octobre 2017 - 12:30
perso je mettrais un delay entre le changement haut/bas de pulse.
si ton driver n'est pas assez rapide, il risque de ne pas voir le changement d'état.
Le "enable" est bien actif sinon ton moteur ne bougerait pas du tout, donc tu peux le laissé non piloté.
Par contre, dans ton deuxième exemple, les délais sont de 50µs entre chaque changement d'état de pulse,
si tu travailles en pas entiers et que ton moteur fait 400 pas par tours, ça veut dire qu'il devrait tourner à 3000trs/min
Essayes avec 5000 au lieu de 50 pour voir...
#128
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 21 octobre 2017 - 03:10
@Forthman : j'ai mis un delay de 2000, 5000 c'était trop , j'avais pas fait gaffe à cette erreur : il y a plusieurs mois que j'avais préparé ça, et j'écris une ligne et je fais un copier/coller quand j'en ai besoin donc une erreur de frappe reproduit x fois .
C'était bien un problème de frréquence, maintenant ça fonctionne dans les deux sens, avec le programme n°2 corrigé.
Ce n'est pas très rapide mais je m'en fou, c'est juste pour les tests puisque lorsque la machine tournera elle sera piloter via une interface PC.
Edit : je ne sais pas si je ne vais pas tout abandonner ...
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#129
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 21 juillet 2018 - 12:23
J'ai reçu mon nouveau compresseur, ce n'est pas un super compresseur mais il suffira pour ma CNC plasma et pour ma sableuse (pas les deux en même temps ! ).
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#130
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 29 octobre 2018 - 08:58
Pendant un moment je pensais abandonner définitivement cette machine mais depuis quelques jours que je teste un soft pas mal pour générer le G-code et aussi parce que je vois que je ne pourrai probablement pas usiner toutes mes pièces de robot sur ma petite CNC (3040) ça me donne envie de me remettre à celle-ci.
Cette fois je ne dirai pas que je la terminerai pendant l'hiver parce il faut déjà que je vois ce qui me reste à faire et ce que je dois investir (je sais que j'ai un palier HS).
J'avais fait faire des pièces en alu de 10mm d'épaisseur pour la modif suite au passage à des axes supportés mais pour mettre des vis FHC de 12 c'est un peu juste donc quand j'aurai investit dans une fraise pour faire ce chanfrein je ferai un essai et si ça ne va pas je referai la pièce en 20mm d'épaisseur sur ma toute petite CNC.
Je pense aussi remplacer la table bois par une table en alu rainurée (si je gagne au Loto ).
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#131
Microrupteurman
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
Posté 30 octobre 2018 - 02:57
Tu veux pas corriger le titre ? ^^ Ça me tracasse à chaque fois
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#132
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 31 octobre 2018 - 05:48
Il n'est pas bien mon titre ?
Edit : erreur de sujet
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#133
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
Posté 07 novembre 2018 - 02:19
Quand tu l'aura fini, tu as un client qui t'attend ici.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#134
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 07 novembre 2018 - 12:06
Il faut que je m'y remette, là j'ai autre chose à faire avant parce que pour les travaux j'ai mis pas mal de basard dessus, on ne voit même plus la machine.
Je te rassure, samedi prochain (ou mardi prochain) je vais acheter ce qu'il me faut pour reprendre le rangement et ensuite j'ai bien envie de reprendre le chantier de cette CNC, surtout que maintenant je pourrai faire les pièces dont j'ai besoin avec la CNC 3040.
Etat de la CNC :
- Les deux côtés (axe Y) sont prêt, d'un point de vue mécanique
- l'axe Z est à revoir
- L'axe X a besoin d'un nouveau palier et de deux nouvelle pièces en alu plus épaisse que celles que j'ai.
- La table bois va être remplacée par une table alu rainurée
- L'électronique est à câbler, peut-être avec une nouvelle carte...
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#135
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 23 novembre 2018 - 11:33
Je reprends ici ce qui a été dit dans le sujet de Donavandu88 :
Depuis quelques jours je réfléchi à la reprise du chantier de ma CNC (SAH90130) et j'ai trouvé un intérêt à ce bras, donc dès que j'ai mis en place mon imprimante 3D je lance l'impression des pièces.
Tu veux faire quoi du coup avec le bras ?
Je veux utiliser ce bras pour un petit magasin d'outils.
MANIPULATEUR-41.jpg
ça implique d'avoir des outils assez légers (ça c'est ok je pense) mais surtout un système de montage rapide sur la machine, et là c'est pas simple à mettre en place...
Cette CNC sera équipé d'un ATC, j'espère pouvoir en trouver un à un prix correct, seule la partie mécanique m'intéresse, pas l'électronique si ça peut faire baisser le prix.
Les porte-outils sont du SK15, pour la Kress et donc les outils ne seront jamais bien gros.
j'ai quand-même un gros doute sur la fiabilité d'un bras pour positionner un outil dans une broche, ou du moins un bras avec un prix de revient raisonnable.
chez un client ils ont des cnc avec une rangée d'outils sur l'extrémité de la table (ok, la table fait 4mx2m)
les outils sont juste posés dans leurs logements, et c'est la broche qui vient les chercher.
avantage : aucun mécanisme supplémentaire
inconvénient : bloque un bord de la table
En fait le bras ne positionnera pas l'outil dans la broche mais dans un support qui est fait pour. L'avantage de ce bras est d'avoir un plus grand choix d'outils qu'avec seulement le support qui généralement sont limité à 5 emplacements (pour les modèle commerciaux).
Autre détail, concernant le support cette fois-ci, il sera mobile pour pouvoir libérer la table.
Tout ceci n'est que projet dont je débute la réflexion, donc rien n'est encore définitif.
- Donovandu88 aime ceci
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#136
Forthman
-
- Membres
-
- 1â¯382 messages
Pilier du forum
- Gender:Not Telling
- Location:Montauban (82)
Posté 24 novembre 2018 - 07:55
5 outils ça commence à être sympa quand-même.
à moins de faire des pièces en série, avec un bureau d'étude qui pondent les programmes et des opérateurs sur les machines,
avoir un stock d'outil référencés n'est pas un gain de temps au contraire 
#137
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 24 novembre 2018 - 12:14
Et si j'ai envie de faire mumuse avec un bras manipulateur ?
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#138
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 08 décembre 2018 - 09:09
Je n'ai pas eu le temps d'avancer sur mon robot j'étais sur autre chose...
Vous vous souvenez :

Presque tout : la prise 220v de la CNC n'est pas la bonne, pourtant j'avais bien confirmé France pour le choix de la prise, et le générateur plasma n'a ni le fil ni la prise (400V) c'est un peu plus gênant parce que la prise 400V est chère mais bon sinon rien d'insurmontable.
Ah si, ils auraient pu mettre des roulettes sous le générateur plasma.
Pour faciliter son déplacement je fais un chariot :
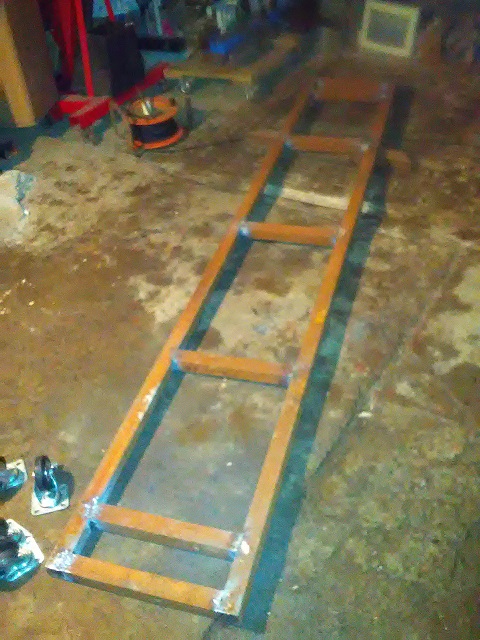
(Désolé pour la qualité de la photo, mon téléphone ne doit pas aimer le noir)
Ne regardez pas de trop près les soudures, je dois en reprendre quelques une mais pour ma défense ceux sont mes premières soudures hormis deux bouts de tubes que j'avais essayé de souder la semaine dernière.
Il me reste à souder des plaques pour fixer les roulettes et un fond en tôle avant de poser le rail de la CNC plasma (noté que ce rail pèse environs 100Kg).
Le générateur plasma sera aussi sur un chariot, avec le matériel de soudure.
J'avais prévu une table pliante avec ce chariot mais je me suis trompé dans l'achat de ma ferraille, donc ça attendra.
Ce sera plus facile de déplacer ma machine quand je vais vouloir essayer de découper les pièces de mon UGV.
Edit : pour protéger la machine qui sera dessus, je prévois de faire un couvercle amovible.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#139
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 15 décembre 2018 - 12:31
Sur ma CNC je prévois quelques modifs :
- remplacement de la table bois (lamellé-collé actuellement) par soit une table alu (trop chère) ou soit une table bois (MDF) et là j'hésite entre deux modèle :
ou
Pour l'usinage de l'alu je pense que la table alu serait mieux mais la table bois ne pourrait-elle pas faire l'affaire ?
- élargissement de la table (peut-être) j'avais un portique d'environs 1,20m de large et là je passerais bien à un portique d'environs 1,50m de large, j'ai une vis à bille de longueur (retirée des côtés parce que trop courte), l'achat des profilé alu reste abordable mais il faudrait que remplace les rail TBR25 de 1,20 par des rails TBR25 de 1,50m, c'est encore un budget. L'idée est de faire passer, entre les axe Y, une plaque complète (alu, MDF, contreplaqué, etc...) en largeur de 1,22 (ou 1,25m) sans avoir à la recouper dans tous les sens. Au départ je voulais faire une machine pouvant recevoir une plaque entière (1,.22x2,50m) mais je n'avais pas la place pour une machine de cette taille, je toujours pas trop de place mais pour une demi plaque (1,22x1;25m) ça passera peut-être.
J'y réfléchis parce qu'en janvier j'envisage une commande de profilé alu pour autre chose et j'aimerais y ajouter les profilés pour mettre sous la table, ceux actuellement présent sont trop courts.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#140
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 23 décembre 2018 - 05:24
Heureusement sur cette machine j'ai prévu des FDC parce que vu les problèmes rencontré sur la 3040 ça pourrait bien m'énerver assez vite, en même temps ça me motive pour reprendre la construction de la CNC mais je dois faire de la place avant.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




