
Ok, effectivement j'ai lu un peu rapidement, en fait tu avais déjà les outils, il faut juste que tu codes maintenant 

Lego - Char à géométrie variable
Débuté par
Oracid
, janv. 16 2017 01:00
50 réponses à ce sujet

#22

Oracid
-
- Modérateur
-

- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 26 septembre 2017 - 03:30
Voici les premiers rushs. (vidéo non public)
Je suis très, très, très content !
Remarquez comme le capteur d'inclinaison détecte bien la pente de l'escalier et déplie le char, puis lorsqu'il redescend, il redresse le nez du char.
C'est vrai qu'il y a quelques problèmes de structure. Cela est dû à la coupure du chassis au niveau de la crémaillère, mais ça devrait s'arranger.
Il y encore un peu de boulot.
C'est moi qui télécommande le char, mais la modification du chassis est automatique, bien sûr.
Je suis très, très, très content !
Remarquez comme le capteur d'inclinaison détecte bien la pente de l'escalier et déplie le char, puis lorsqu'il redescend, il redresse le nez du char.
C'est vrai qu'il y a quelques problèmes de structure. Cela est dû à la coupure du chassis au niveau de la crémaillère, mais ça devrait s'arranger.
Il y encore un peu de boulot.
C'est moi qui télécommande le char, mais la modification du chassis est automatique, bien sûr.
- arobasseb , Melmet , Mike118 et 4 autres aiment ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#24
Melmet
-

- Modérateur
-
- 1â¯519 messages
Pilier du forum
- Gender:Male
- Location:Saint-Sozy (46200)
Posté 26 septembre 2017 - 07:25
Super, mais t'es un mauvais pilote chars 
J'ai bien envie de faire une collection de logo pour faire pareil
Ne demande jamais à un robot de faire ce que tu peux faire toi même. 

#25
Amhnemus
-

- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 26 septembre 2017 - 07:49
Super boulot j'adore tu donnerais presque envie de faire des chars 
1ère place Robot Warrior 2019 humanoïdes autonome
#26
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 26 septembre 2017 - 08:22
Que veux tu dire ?J'ai bien envie de faire une collection de logo pour faire pareil
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#27
Mike118
-

- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 26 septembre 2017 - 08:28
lego* ?
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#28
Melmet
-
- Modérateur
-
- 1â¯519 messages
Pilier du forum
- Gender:Male
- Location:Saint-Sozy (46200)
Posté 27 septembre 2017 - 06:38
Oups désolé.... oui LEGO ^^
Ne demande jamais à un robot de faire ce que tu peux faire toi même.
#29
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 27 septembre 2017 - 07:13
Mais oui, c'est une excellente idée !Oups désolé.... oui LEGO
Je voudrais une nouvelle fois insister sur le fait que j'utilise des Lego parce que c'est très pratique et que cela permet de "modéliser" rapidement avec son cerveau.
Je pense mener à terme ce projet, mais une fois terminer, j'aimerais bien (si je ne fais pas autre chose) vous montrer une autre version avec des Lego peut-être ou du profilé d'aluminium, ou du Lego imprimé, avec de vrais servos, peut-être un Arduino à la place de l'EV3, etc...
C'est grace à cette modélisation que je peux envisager de me lancer sur un projet plus ambitieux.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#30
Melmet
-
- Modérateur
-
- 1â¯519 messages
Pilier du forum
- Gender:Male
- Location:Saint-Sozy (46200)
Posté 27 septembre 2017 - 08:16
Tu connait surement le logiciel Lego digital designer ?
Ne demande jamais à un robot de faire ce que tu peux faire toi même.
#31
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
#32
Melmet
-
- Modérateur
-
- 1â¯519 messages
Pilier du forum
- Gender:Male
- Location:Saint-Sozy (46200)
Posté 27 septembre 2017 - 11:42
Juste pour avoir ton avis.
Ne demande jamais à un robot de faire ce que tu peux faire toi même.
#33
pmdd
-

- Membres
-
- 940 messages
Membre chevronné
- Gender:Male
Posté 27 septembre 2017 - 12:07
On dit, LDD.
Pourquoi ?
bonjour
j'ai lu tes posts et je suis comme toi vis a vis des legos
Quelle imprimante 3D conseilles tu ?
Existe t-il des cartes qui permettent d'utiliser les capteurs arduino avec l'EV3 ?
Cordialement
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#34
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 27 septembre 2017 - 01:26
J'ai en projet une très grosse imprimante, mais actuellement je possède une Dagoma Discoeasy200 qui n'est pas si mal pour pas cher et la communauté est importante.j'ai lu tes posts et je suis comme toi vis a vis des legos
Quelle imprimante 3D conseilles tu ?
Existe t-il des cartes qui permettent d'utiliser les capteurs arduino avec l'EV3 ?
La Tevo Tarantula est très à la mode actuellement.
Mais, je pense qu'ici, il y a beaucoup d'avis différents.
Cela dépend beaucoup de ce que tu veux faire. Une pièce tous les 6 mois ou une pièce par jour.
A mon avis, connaissant bien les Lego, seuls les pièces d'une grande taille ou des adaptations vers Lego vont t'intéresser.
Tu ne vas pas imprimer des choses que tu vas faire en moins de 10 minutes avec des Lego.
Il faut que tu nous dises quelle est ton centre d'intérêt.
Pour les capteurs, c'est plutôt l'inverse. Il y a un Shell Arduino compatible Lego.
Il y a un fil sur ce genre de choses, je vais voir à le mettre un peu à jour, http://www.robot-maker.com/forum/topic/11007-lego-arduino-raspberry-pi/
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#35
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 29 septembre 2017 - 03:32
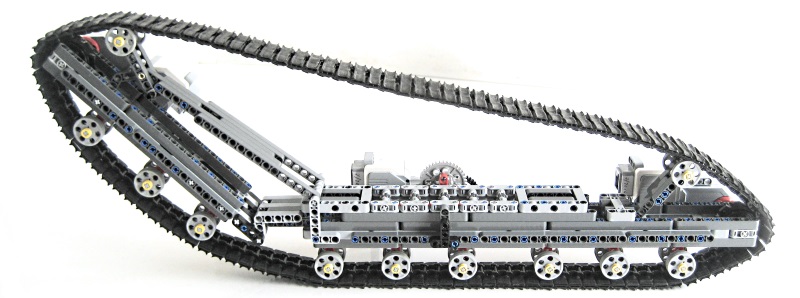
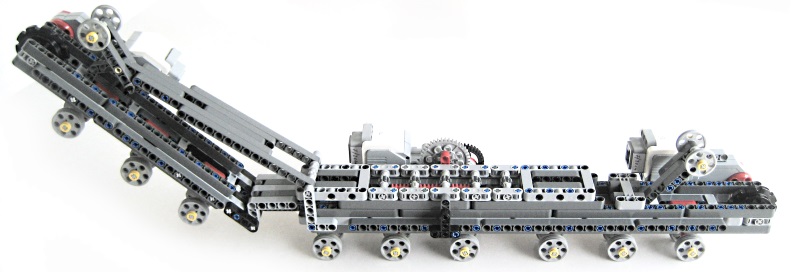
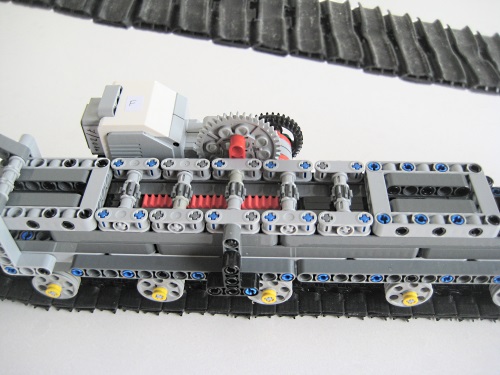
Voici ma nouvelle version du train de chenille.
L'objectif est de rigidifier l'ensemble, mais cela a un cout, ce train de chenille pèse 714g contre 469g précédemment.
J'ai eu la main verte, cela ne m'a pas pris trop de temp.
A vide tout va bien, mais avec la chenille, la petite roue dentée craque un peu.
Mon objectif, comme à mon habitude, est de valider un concept et de faire une vidéo pour ma satisfaction personnelle.
Après, si les servos Lego ne sont pas assez puissants, il suffira d'en prendre d'autres. pour une réalisation opérationnelle.
Sur la dernière image on voit la version précédente pour pouvoir faire une comparaison.
Cliquez moi.

L'objectif est de rigidifier l'ensemble, mais cela a un cout, ce train de chenille pèse 714g contre 469g précédemment.
J'ai eu la main verte, cela ne m'a pas pris trop de temp.
A vide tout va bien, mais avec la chenille, la petite roue dentée craque un peu.
Mon objectif, comme à mon habitude, est de valider un concept et de faire une vidéo pour ma satisfaction personnelle.
Après, si les servos Lego ne sont pas assez puissants, il suffira d'en prendre d'autres. pour une réalisation opérationnelle.
Sur la dernière image on voit la version précédente pour pouvoir faire une comparaison.
Cliquez moi.
- Melmet et Oliver17 aiment ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#36
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 30 septembre 2017 - 07:08
Désolé, j'ai oublié de te répondre.Juste pour avoir ton avis.
Je pense que LDD est intéressant pour quelqu'un qui voudrait construire une maquette, une copie de quelque chose de bien défini.
Mais moi, je ne sais pas du tout où je vais quand je commence un projet.
Je vais beaucoup plus vite avec mon cerveau et les pièces devant moi qu'avec un logiciel, quel qu'il soit.
Pour moi, le système Lego, c'est déjà en soi un mécanisme de modélisation.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#37
Melmet
-
- Modérateur
-
- 1â¯519 messages
Pilier du forum
- Gender:Male
- Location:Saint-Sozy (46200)
Posté 30 septembre 2017 - 07:30
Ok, merci de la réponse.
Je suis d'accord avec toi sur le sujet.
Ca occupera mon fils 5, 10 minutes
Ne demande jamais à un robot de faire ce que tu peux faire toi même.

#39
Mike118
-
- Administrateur
-
- 9â¯963 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 30 septembre 2017 - 10:56
Très intéressant ! =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#40
Oracid
-
- Modérateur
-
- 6â¯766 messages
Pilier du forum
- Gender:Male
Posté 01 octobre 2017 - 06:48
Merci Ashira. C'est effectivement très intéressant.
Des étudiants de l'université de Séoul m'avaient contacté, il y a quelques temps, visiblement le sujet les intéresse.
C'est la première fois que je vois un engin de petite taille gravir des escaliers aussi facilement.
Je ne pense pas que les escaliers fassent 17cm, mais en extrapolant la taille des roues, ça devrait passer.
Le test n'a pas été fait sur des escaliers avec nez de marche, dommage.
A 0'45, ils ont multiplié la vitesse de la vidéo par 2, donc visiblement cela peine un peu dès qu'il s'agit d'escalier.
La queue de l'engin n'est là que pour l'allonger et lui donner un point d'appui. C'est très important.
Pour avoir une bonne lecture de ce type de tests, il faut toujours noter si les escaliers ont des nez de marche.
Le franchissement d'un parallélépipède (une pile de livres) n'a pas beaucoup d'intérêt. C'est bien des escaliers qu'il faut monter, car souvent l'engin se heurte à la deuxième marche.
Pour le franchissement d'un gros caillou, c'est pareil. Le caillou peut avoir différent angles d'attaques qui facilitent la montée. C'est un obstacle à 90° qu'il faut franchir.
Dans cette vidéo, vous pouvez voir jusqu'où on peut délirer face au problème de la montée d'escalier. Notez la queue du robot, toujours pour le point d'appui. Ce gars a quelques bonnes idées, c'est sûr, mais bon... au final, on ne voit jamais son robot monter des escaliers.
Personnellement, je me suis fixé sur le char car c'est la solution qui permet une charge lourde comme un bras articulé ou un système d'aspiration, mais il est très intéressant de voir comment en s'inspirant des insectes, donc avec une structure légère, on peut avantageusement imaginer un système capable d'embarquer une petite caméra pour la surveillance de locaux, par exemple.
La montée d'escalier est un sujet qui intéresse beaucoup les amateurs de robots dans le monde entier, mais peu en France.
Des étudiants de l'université de Séoul m'avaient contacté, il y a quelques temps, visiblement le sujet les intéresse.
C'est la première fois que je vois un engin de petite taille gravir des escaliers aussi facilement.
Je ne pense pas que les escaliers fassent 17cm, mais en extrapolant la taille des roues, ça devrait passer.
Le test n'a pas été fait sur des escaliers avec nez de marche, dommage.
A 0'45, ils ont multiplié la vitesse de la vidéo par 2, donc visiblement cela peine un peu dès qu'il s'agit d'escalier.
La queue de l'engin n'est là que pour l'allonger et lui donner un point d'appui. C'est très important.
Pour avoir une bonne lecture de ce type de tests, il faut toujours noter si les escaliers ont des nez de marche.
Le franchissement d'un parallélépipède (une pile de livres) n'a pas beaucoup d'intérêt. C'est bien des escaliers qu'il faut monter, car souvent l'engin se heurte à la deuxième marche.
Pour le franchissement d'un gros caillou, c'est pareil. Le caillou peut avoir différent angles d'attaques qui facilitent la montée. C'est un obstacle à 90° qu'il faut franchir.
Dans cette vidéo, vous pouvez voir jusqu'où on peut délirer face au problème de la montée d'escalier. Notez la queue du robot, toujours pour le point d'appui. Ce gars a quelques bonnes idées, c'est sûr, mais bon... au final, on ne voit jamais son robot monter des escaliers.
Personnellement, je me suis fixé sur le char car c'est la solution qui permet une charge lourde comme un bras articulé ou un système d'aspiration, mais il est très intéressant de voir comment en s'inspirant des insectes, donc avec une structure légère, on peut avantageusement imaginer un système capable d'embarquer une petite caméra pour la surveillance de locaux, par exemple.
La montée d'escalier est un sujet qui intéresse beaucoup les amateurs de robots dans le monde entier, mais peu en France.
Ma chaine YouTube : https://www.youtube..../oracid1/videos








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




