Salutations!
Comme je l'ai indiqué dans ma présentation, je suis entrain de construire un robot et je suis face à quelques problèmes. Ils sont de nature diverses, j'aurai pu faire plusieurs sujets pour chaque problème dans au moins trois catégories différentes; j'espère qu'il est donc judicieux de faire un sujet ici les réunissant tous.
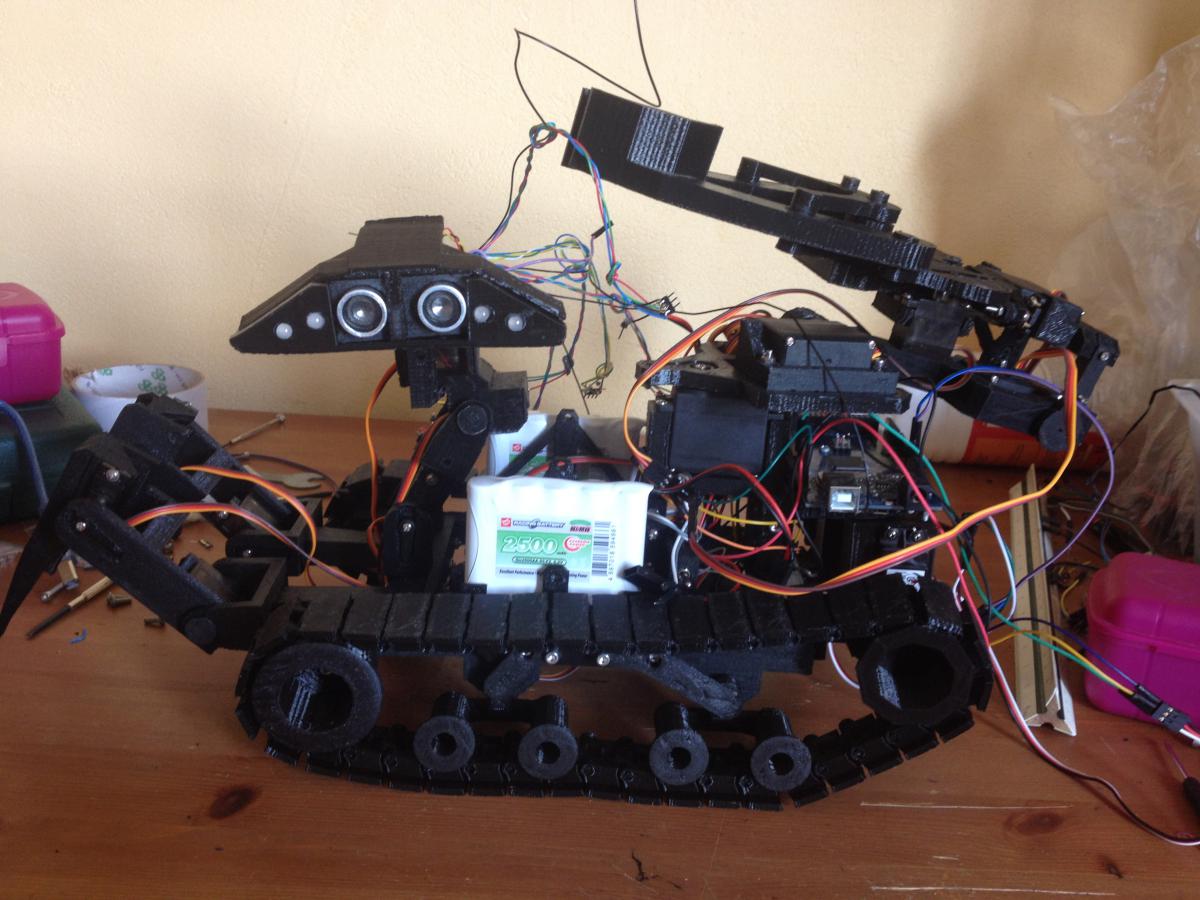
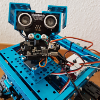
Mon robot est constitué de:
- Un socle chenillé, motorisé par deux servomoteurs à rotation continue
- Deux pates uniquement décoratives - sauf si le tout faible couple des servos est suffisant pour soulever le robot de plusieurs kilos, ce dont je doute - constituées de deux servo MG90
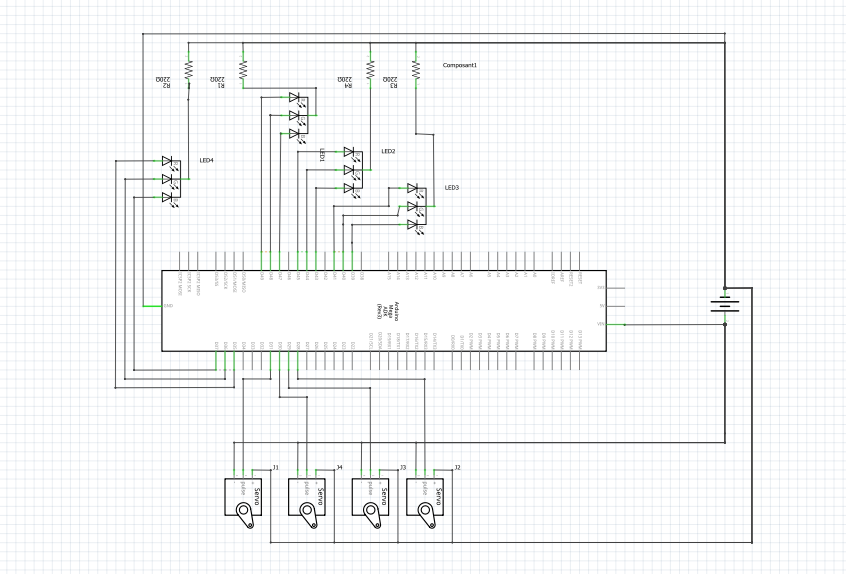
- Une tête comprenant quatre LED tricolores et d'un RADAR arrochée sur l'équivalent d'un cou constitué de trois servomoteurs MG90
- Un gros bras robotique de près de quarante centimètres (quatre servos MG996R et un MG90)
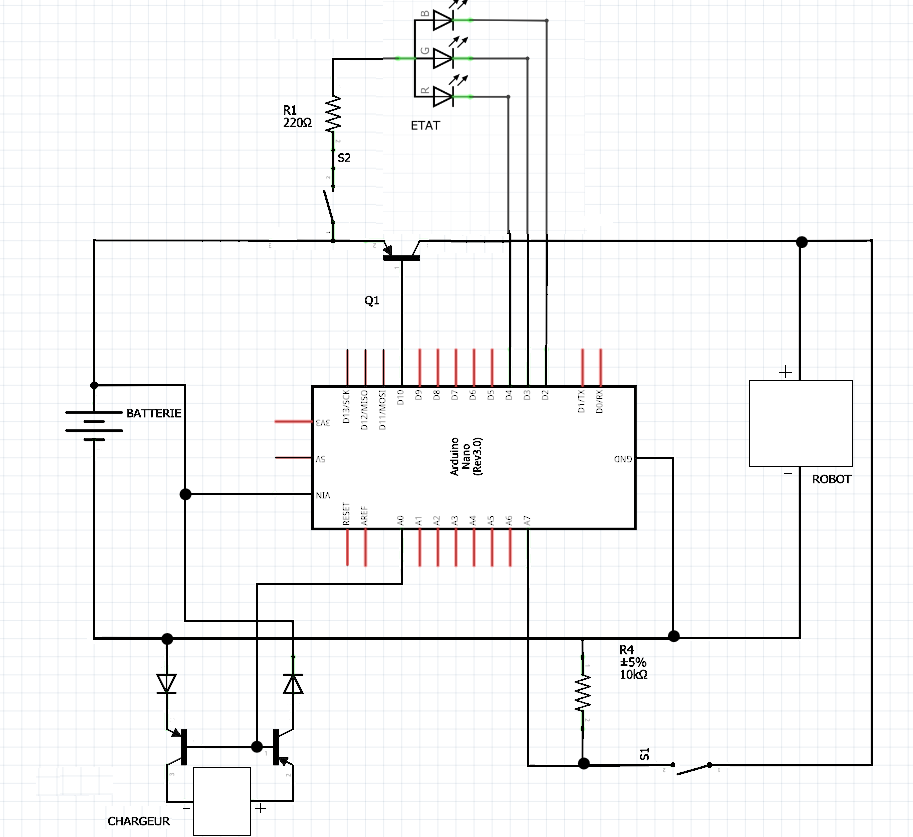
Pour mettre tout ça en mouvement, j'utilise une arduino mega et deux batteries 6V - 2500mAh branchées en parallèle. Si mes calculs sont exact, les batteries doivent être suffisantes pour faire tourner au moins la moitié des servos en même temps. Mon premier problème est lié à l'alimentation de tous ces servos et composants. J'ai branché la plupart des servos sur le rail d'alimentation( c'est comme ça qu'on dit en Français ? ) de ma breadboard, en parallèle donc, mais quand j'ai branché la batterie, le fil la reliant au rail, et le rail lui-même est devenu brûlant en quelques secondes. Je me demande donc quel serait le meilleur moyen d'alimenter tous ces servos. Existe-t-il un équivalent de ce rail d'alimentation pouvant supporter tant de courant? Je pourrais débourser un peu pour mettre ma main dessus; mais je préfère autant que possible ne rien acheter et faire à la main. Si vous avez des suggestions, je suis preneur.
Mon projet initial était de faire un robot chenillé autonome, qui peut plus ou moins se repérer dans l'espace et qui sait quand aller se recharger, et où. J'imagine donc une petite station de recharge branchée sur le secteur, posé sur le sol, sur laquelle le robot pourrait venir se recharger, le tout sans la moindre intervention de ma part. Est-il possible de faire simplement une telle station, et aurait-elle besoin de matériel supplémentaire et de circuits spéciaux que ce soit du côté du robot ou du côté de la station de recharge?
J'ai déjà commencé la programmation de l'intelligence artificielle du robot , qui pour l'instant doit lui permettre de se repérer dans l'espace en utilisant uniquement un simple radar, mais je compte l'améliorer autant que possible; et déjà maintenant, le simple code source de l'IA est trop lourd pour être stocké dans l'arduino mega. Je songe à acheter un raspberry pi ou un équivalent chinois, le orange pi. Quelqu'un a des avis sur ce dernier? Une raspberry pi zero serait-elle suffisante pour une intelligence artificielle élaborée? Je me suis très peu renseigné sur ce sujet, mais j'imagine qu'il est possible de programmer la Pi pour faire tous les calculs complexes et envoyer quelques informations très basiques à l'arduino, peut-être via les broches de communication?
Le robot est mu par des chenilles, elles-mêmes mises en mouvement par des servomoteurs. Mais les chenilles et les roues motrices sont imparfaites , et je ne pense pas qu'il sera possible de déterminer précisément la distance parcourue en utilisant uniquement la rotation des servos. Je pensais démonter une vieille sourie pour pouvoir obtenir un système permettant de calculer précisément la distance parcourue. Mais peut-être existe-t-il de meilleurs façons de résoudre ce problème?
Enfin, est-ce que vous avez des solutions pour éviter qu'il n'y ait des fils électriques de partout?
Je pense avoir fait le tour de ce qui m'empêche d'avancer pour l'instant. Je vous prie d'excuser mon manque de vocabulaire, ou l'imprécision de mes propos, je suis encore un grand débutant. J'aurai bien posté quelques photos du projet, mais avec tous les fils dans tous les sens, je ne pense pas que ce serait d'une grande utilité.