Salut !
Je viens vous présenter un nouveau petit robot (celui de gauche) :
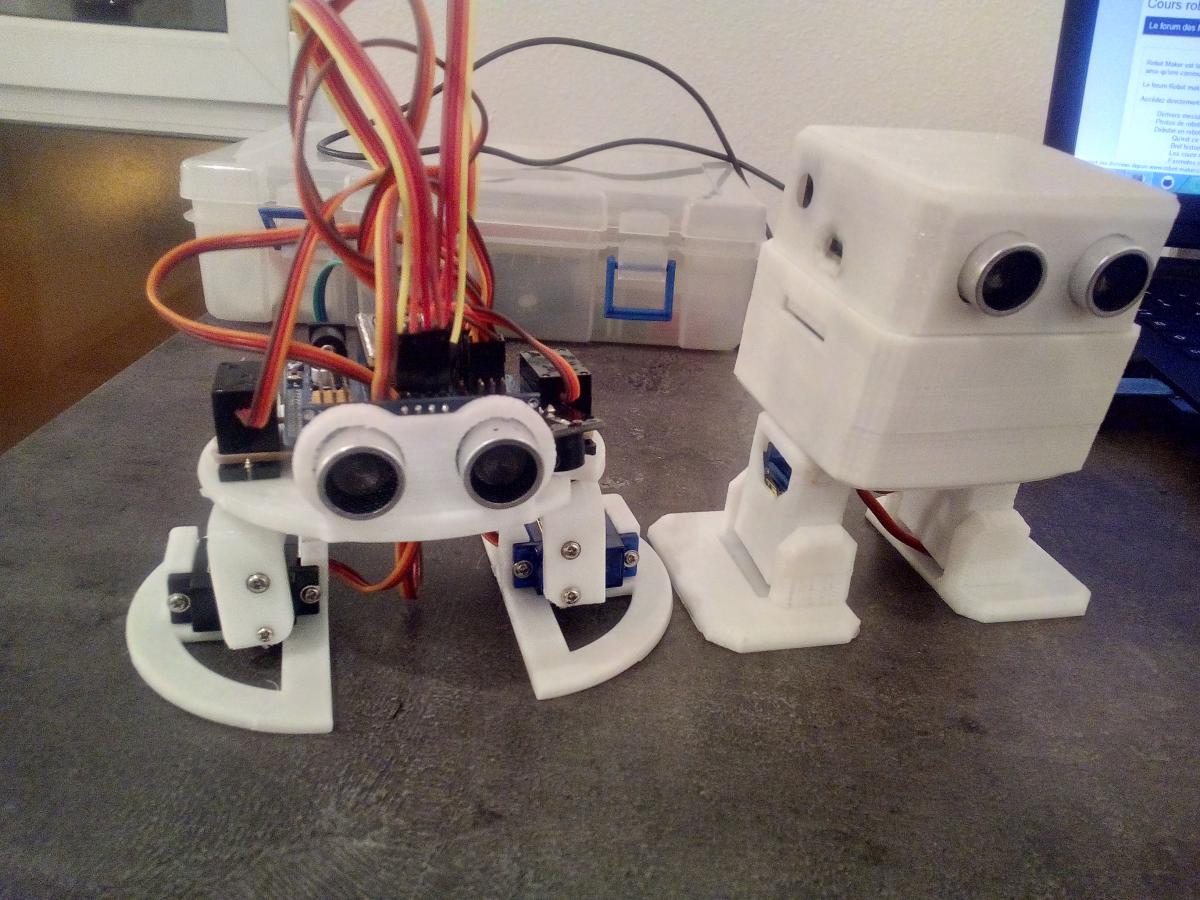

(OTTO à droite et ma version à gauche)
Il s'agit d'un petit bipède dont le fonctionnement ressemble beaucoup au robot OTTO. J'ai réalisé ce robot pour mon atelier à l'Open Bidouille Camp Alsace (c'était il y a maintenant 2 mois).
Donc mes objectifs étaient :
- Apprendre à utiliser Fusion360
- Pouvoir voir les composants et les différentes parties sans avoir le démonter (afin de pouvoir expliquer son fonctionnement plus facilement)
- Pouvoir l'imprimer plus vite et avec moins de plastique que le robot OTTO
- Être compatible avec les robots similaires (pouvoir utiliser les mêmes programmes)
Où j'en suis :
Après plusieurs essais j'ai enfin pu obtenir une version de la tête suffisamment correcte pour être utilisée mais il me reste encore pas mal de modifications à faire:
- Permettre au robot d'être en équilibre lorsque l'on lui attache les batteries
- Changer la forme des pieds pour qu'il ne bascule pas lorsqu'il est sur la pointe des pieds
- Ajuster les différentes dimensions pour que les composants rentrent plus facilement
En gros, il faut que j'améliore la stabilité du robot. (les jambes et les pieds sont des versions modifiées d'un autre robot, je mettrai un lien vers celui-ci dès que je le retrouve)
Coté programmation, j'utilise pour le moment le programme d'OTTO.
Je vais tenter de finir la modélisation cette semaine donc si vous avez des suggestions n'hésitez pas 
J'essayerai de mettre de meilleures photos et les fichiers d'ici une semaine.
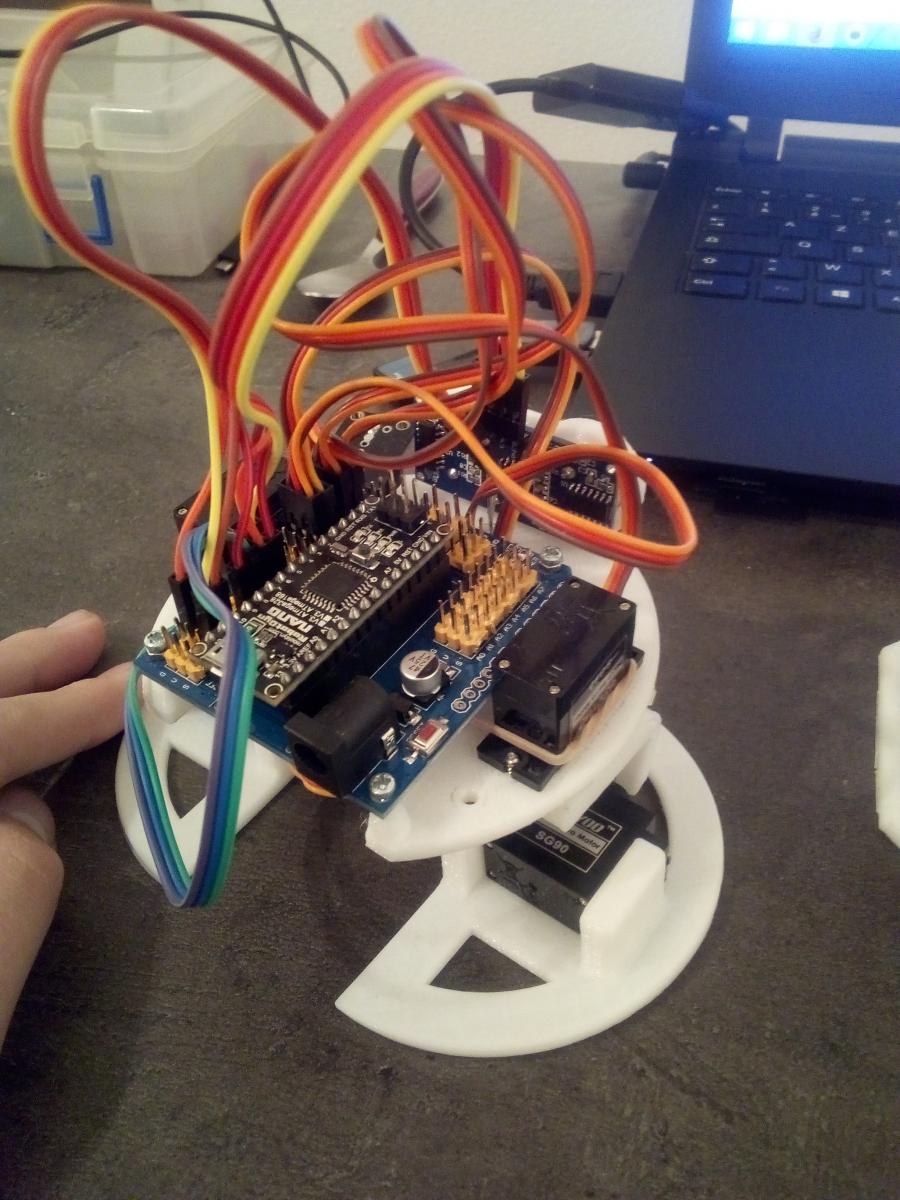
Matériel utilisé :
- 1 Arduino Nano
- 1 Arduino Nano prototype shield
- 4 SG90
- 1 capteur à ultrasons HCSR04
- 1 coupleur de 4 piles AA
- des fils
- des pièces imprimées en 3D
Matériel optionnel:
- 1 buzzer
- 1 led RGB