Bonjour,
Voici l'état d'avancement de mon projet de robot tondeuse. Celui-ci s'inspire du projet Ardumower,
Le projet a débuté en Février 2017.
Les fonctionnalités :
· Déplacement dans toutes les directions.
· Positionnement (odométrie).
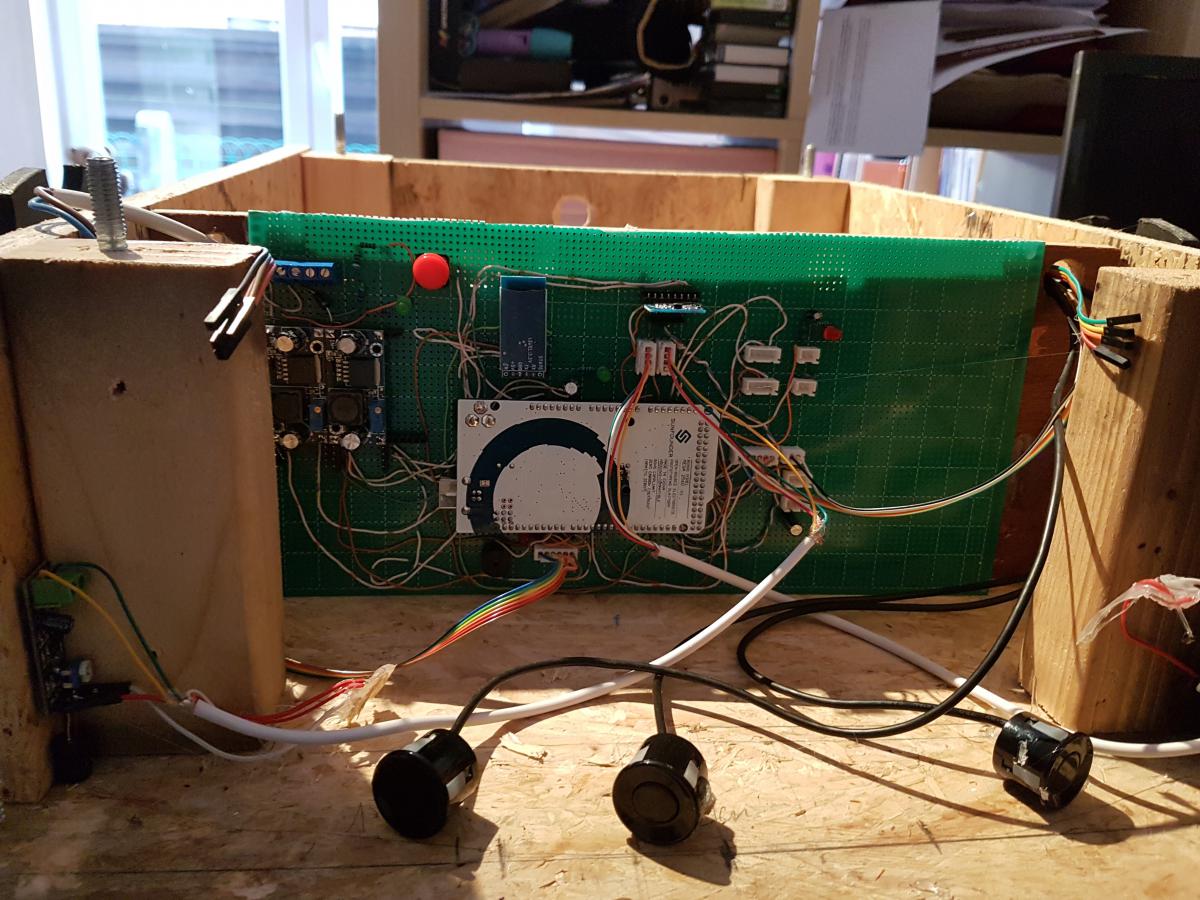
· Détection d’obstacles à distance.
· Détection d’obstacles lors de contacts.
· Détection d’un câble périmétrique.
· Contrôle vie Bluetooth et wifi.
· Position GPS.
· ….
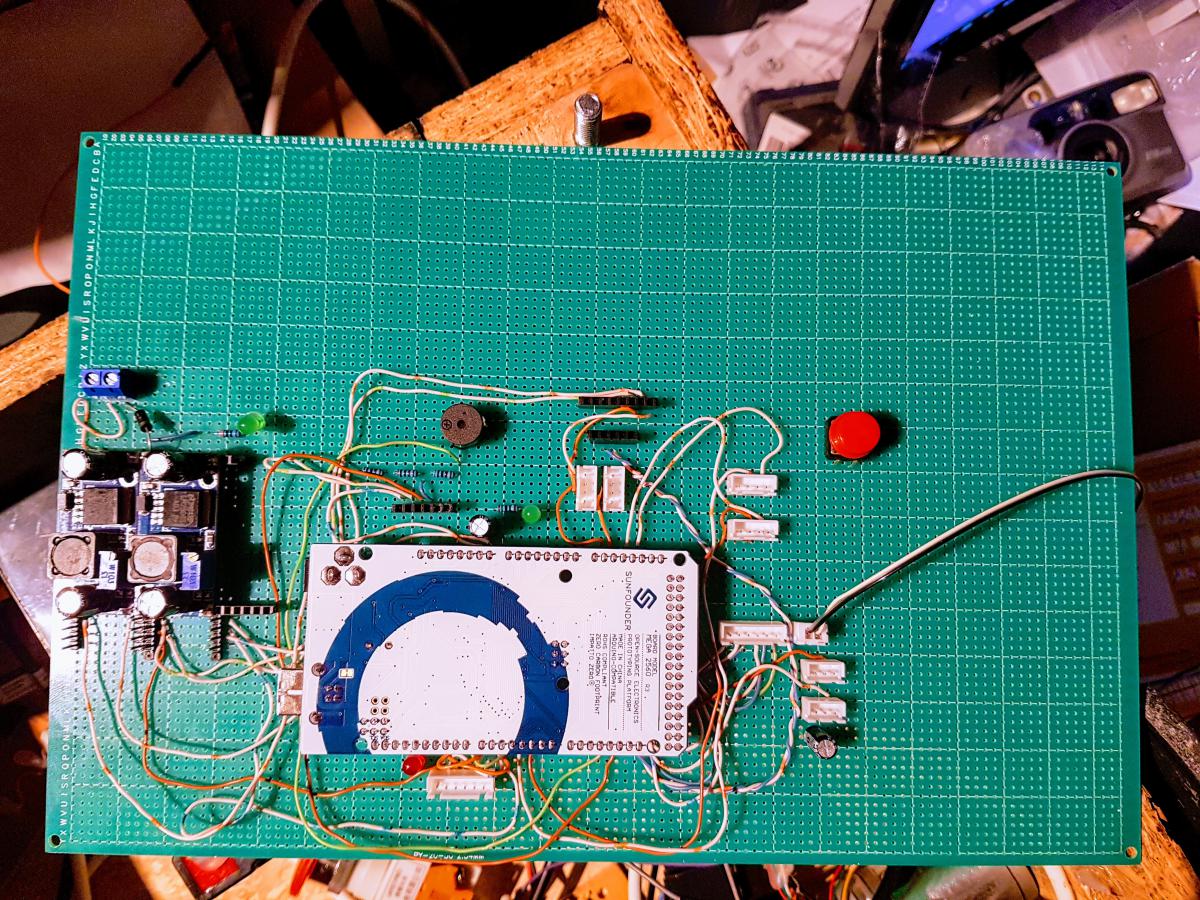
Les composants :
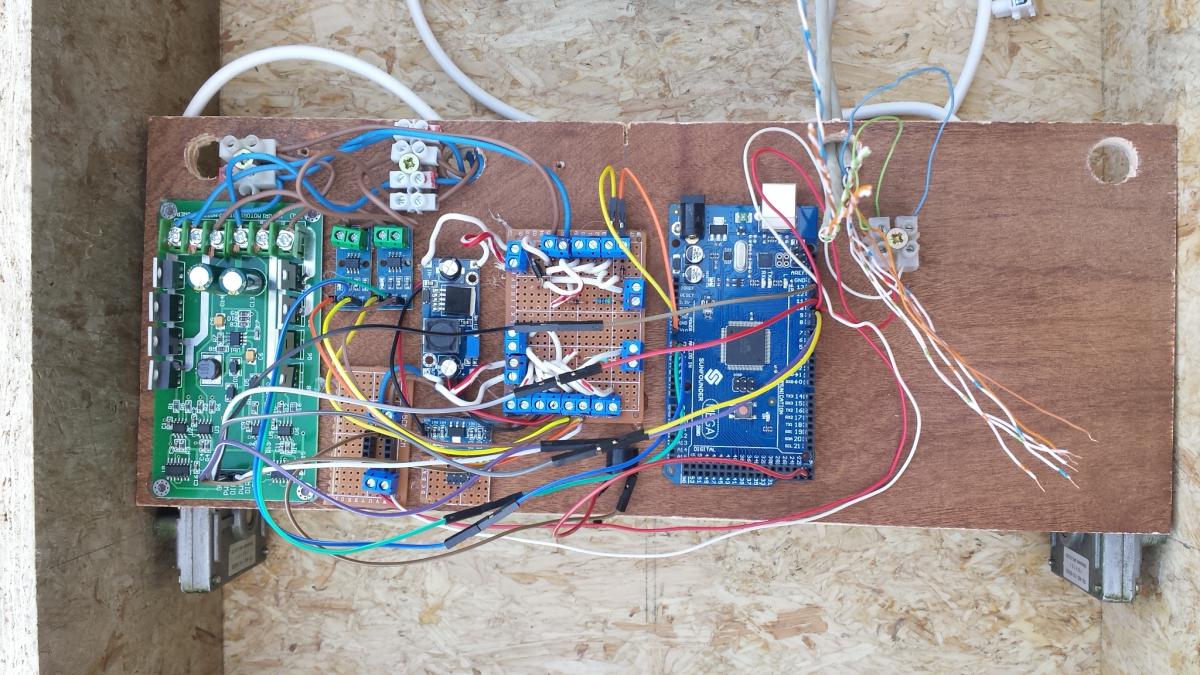
· Le microcontrôleur est un arduino Mega.
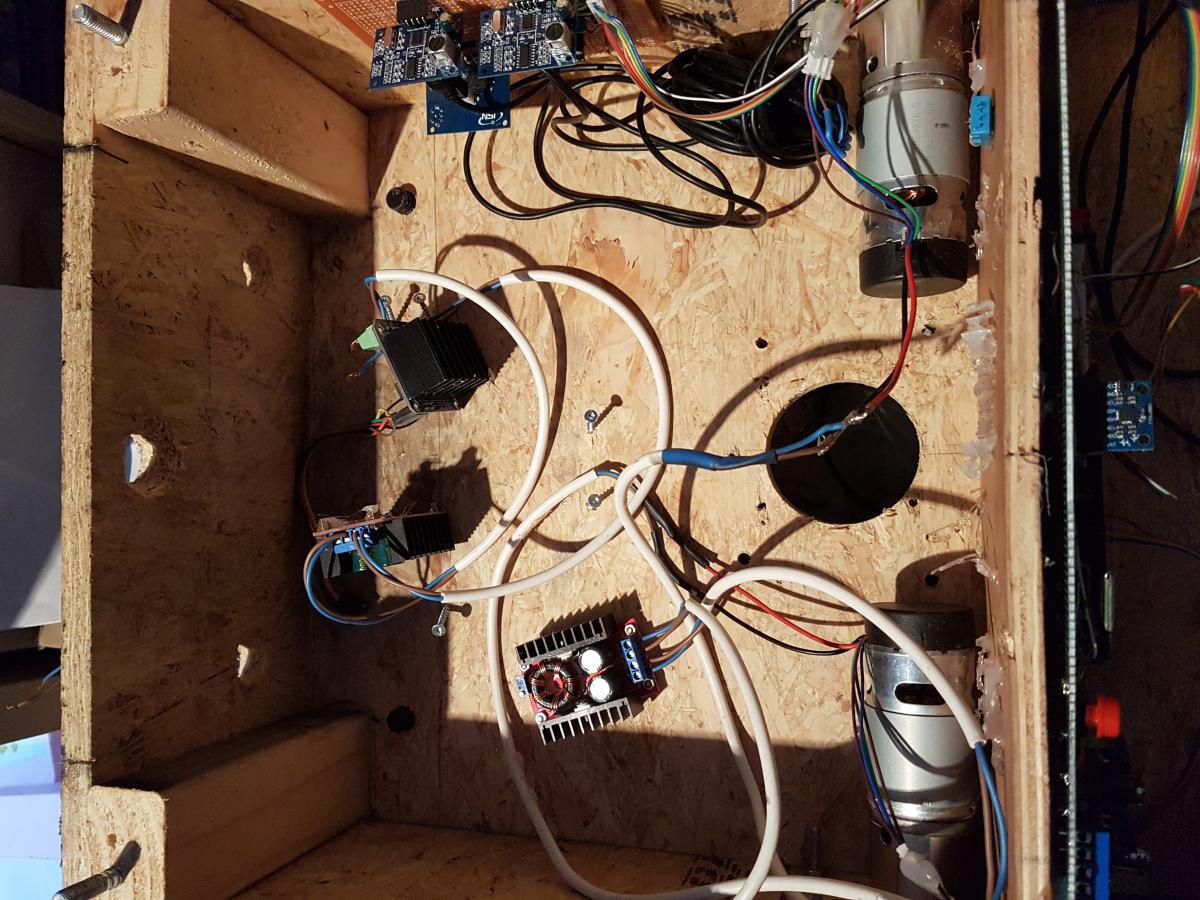
· Le pont en H (drivers) est une carte DC MOSFET IRF3205 3-36V 10/15A Peak30A.
· Les moteurs de (34w) sont en 24v avec comme force de 2.5Nm (c'est super comme couple) avec un capteur effet Hall pour l’odométrie.
· IMU.
· Boussole
· Interrupteur de contacts.
· 2 batteries 12v en parallèle.
· Des circuits qui permettent de passer de 12v à 24v
· Des régulateurs de tensions
· Condensateurs, leds, résistances,…
· …
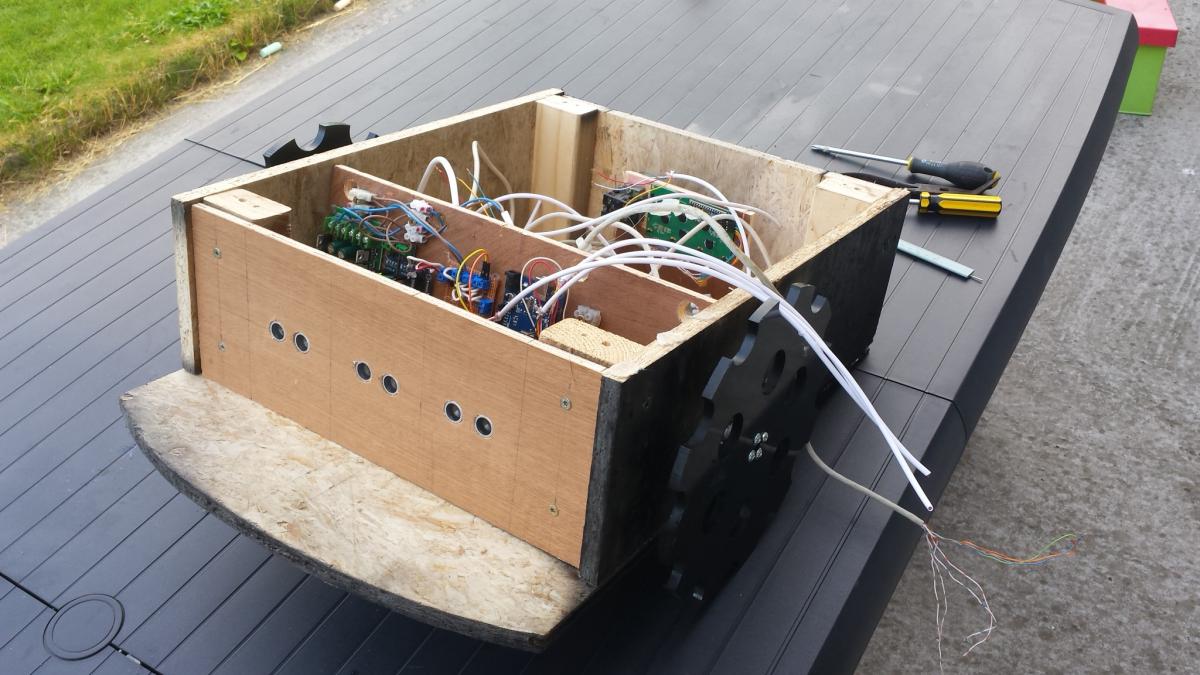
La tondeuse a évolué en 9 mois de projet. Il y a eu trois versions majeures. Pour la première, je n'ai pas de photo ni de vidéo. Par contre, pour la version actuelle, voici une vidéo du suivi de d'une câble périmétrique.
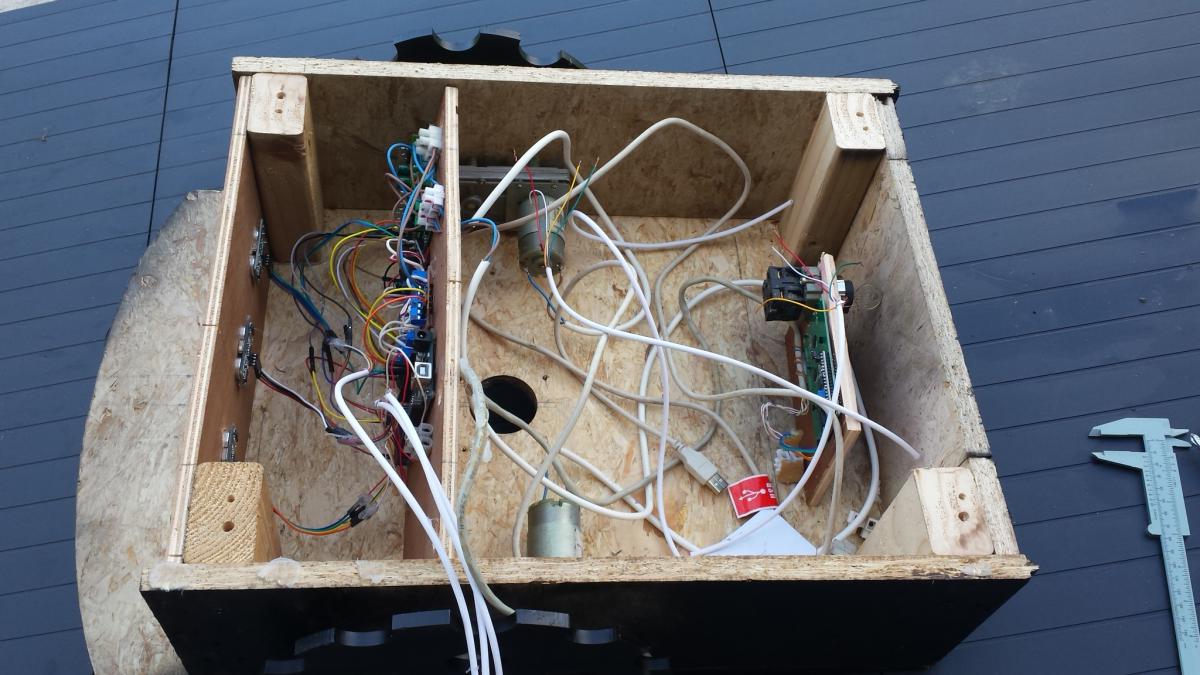
Les premières grosses évolutions ont concerné le châssis, celui-ci est stable depuis plusieurs mois. Il se compose d’OSB 15mm et de pièces de métal pour la fixation des moteurs. Rien de bien compliqué. Néanmoins, la tondeuse a un poids certain, avec les batteries cela représente plus de 12kg.
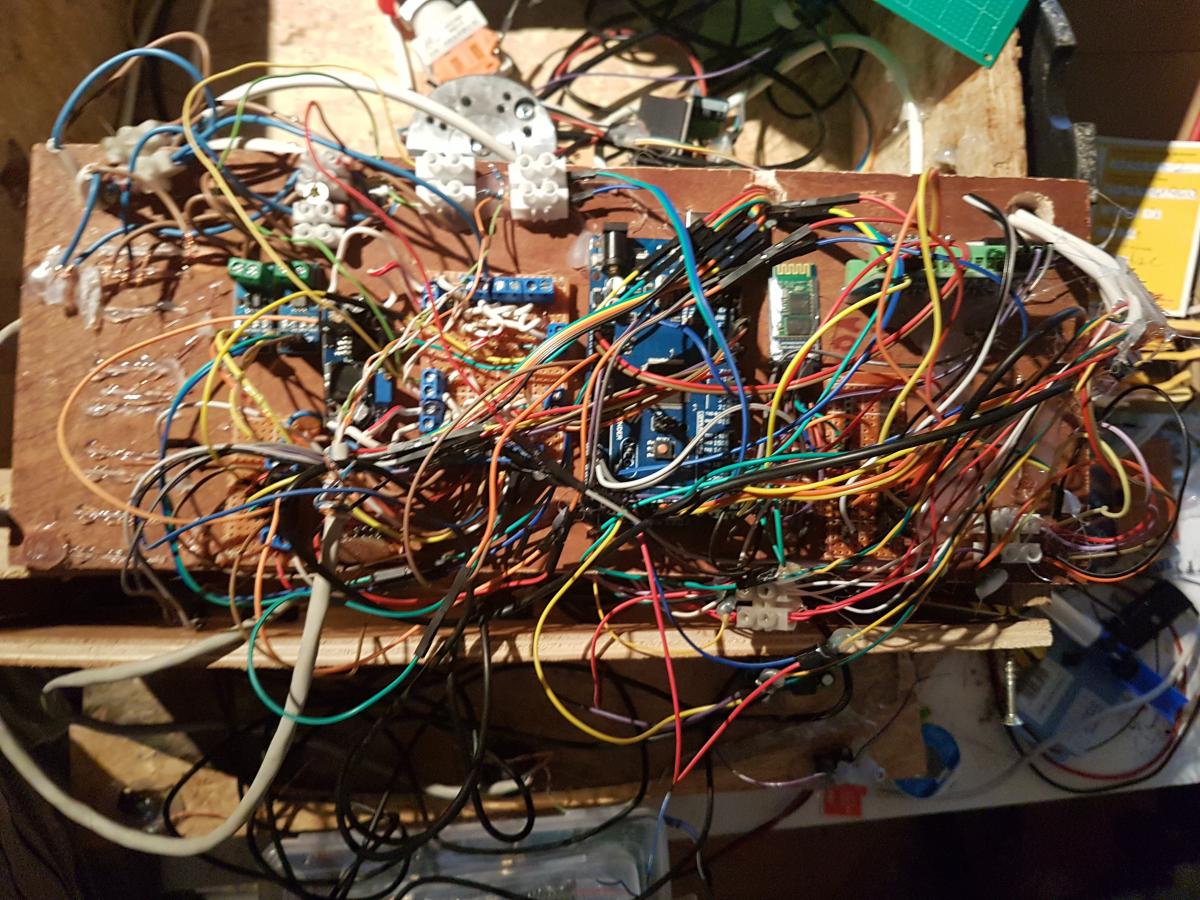
C’est dans le code que les modifications sont les plus profondes. En effet, je suis passé d’une programmation peu structurée à une machine à état. Cette façon de faire est vraiment puissante et évolutive.
Voici quelques vidéos :
Dans la vidéo suivante le code n’est vraiment optimisé, d’ailleurs je viens de le remplacer par une nouvelle version plus performante.
Ancienne version :
Nouvelle Version :
Le comportement est beaucoup plus réactif.
Vidéo de l’ancienne version
Les moteurs sont différents et le code aussi
Voici les vidéos qui m’ont aidé à comprendre les GRAFCET et les convertir en C :
Je pense que pour débuter la programmation de projet plus complexe ces vidéos sont essentielles.
Voilà, c’est une première présentation. Dès que j’ai du temps je partagerai plus d’informations. Je ne sais pas si ma présentation est claire, donc si vous avez des questions n'hésitez pas à poser des questions !