

Bonjour,
Avec un ami nous nous lançons dans la réalisation d'un robot stabilisé sur roue. L'objectif est dans le faire tenir à le verticale de façon autonome. Nous nous inspirons de certaines vidéos sur Youtube ( https://www.youtube....h?v=EwrQEsFmL4E ). Cependant l'objectif est d'en apprendre par nous même !
Pour la construction du robot, nous avons pris deux planches en bois, de 10x20cm et de quelques centimètres d'épaisseur que nous relions l'une à l'autre par deux tiges filetées et le tout est fixé à l'aide de boulons.
Pour la motorisation nous avons utilisé 2 GM256370CA avec des encodeurs et le support qui va avec ainsi que les roues vendues dans le kit sur RobotMaker. On utilise un L298 pour la commande et un Arduino pour notre micro-contrôleur.
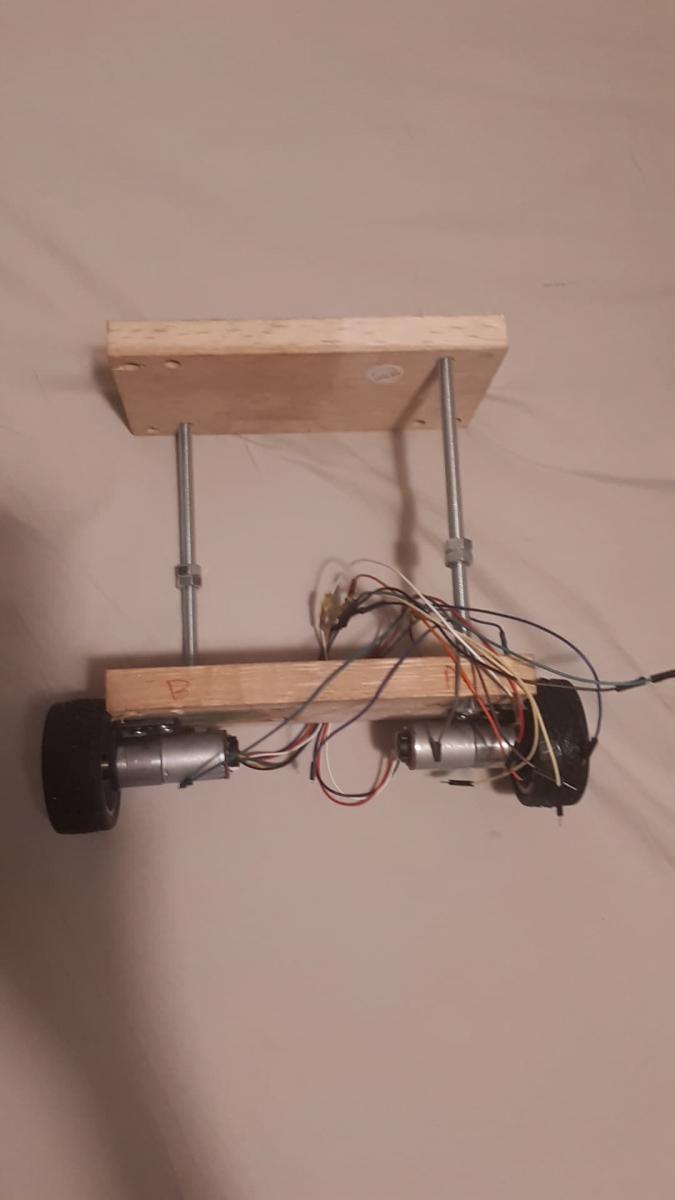
Pour obtenir l'inclinaison du robot nous utilisons un MPU6050 avec un filtre complémentaire. Pour l'alimentation nous avons d'abord utilisé un transformateur USB (5V), nos moteurs étaient donc sous-alimentés mais nous avions un premier résultat.
Ensuite nous avons utilisé un transfo 12V, malheureusement le MPU6050 ne fonctionnait plus ( c'était déjà arrivé une première fois, du à une mauvaise soudure... mais là je pense qu'il est définitivement mort, peut-être à cause d'une fausse manip! ).
Nous attendons donc maintenant :
Un module Bluetooth pour l'arduino
Un kit pile Lipo 12V pour permettre une alimentation plus pratique
De nouveaux accéléromètres et gyroscope.
Nous utilisons un asservissement PID, cependant la réelle difficulté est de régler les coefficients de ces derniers. On à essayé d'y aller à tâtons, mais il est difficile de trouver un juste milieu entre l'asservissement et la saturation. Aussi, on remet en cause le fait que le robot puisse "se rattraper" quand il tombe d'un côté, nous n'avons pas spécialement dimensionné les moteurs et l'inertie du robot... Pour l'instant il ne s'est jamais stabilisé 
En attendant de pouvoir retester de nouveaux coefficients (mais comment les régler ? d'après nos cours de prépa, il serait logique de régler le Kp (proportionnel), puis le Ki et le Kd mais il n'est pas évident d'observer les résultats puisque le système est instable.. ), nous envisageons de rentrer l'asservissement dans Scilab et d'essayer de déduire les Kp, Ki et Kd théoriques. Cependant nous n'avons aucune information sur le moteur (la doc est très faible à ce niveau), que ce soit sur les caractéristiques électriques ou mécaniques. Il faudrait envisager des protocoles pour trouver ces valeurs, mais nous ne sommes pas sur d'avoir ni le matos, ni la précision requise (avec le codeur, dont nous n'avons pas non plus la résolution. Expérimentalement, on trouve 1 degrès un peu près).
Pour l'instant notre difficulté réside donc en le réglage des coefficients du PID.




















