Bonjour,
Je compte faire le montage suivant :
- alimentation 12V400W
- http://www.robot-maker.com/shop/cartes-programmables/193-clone-arduino-uno-16u2.html
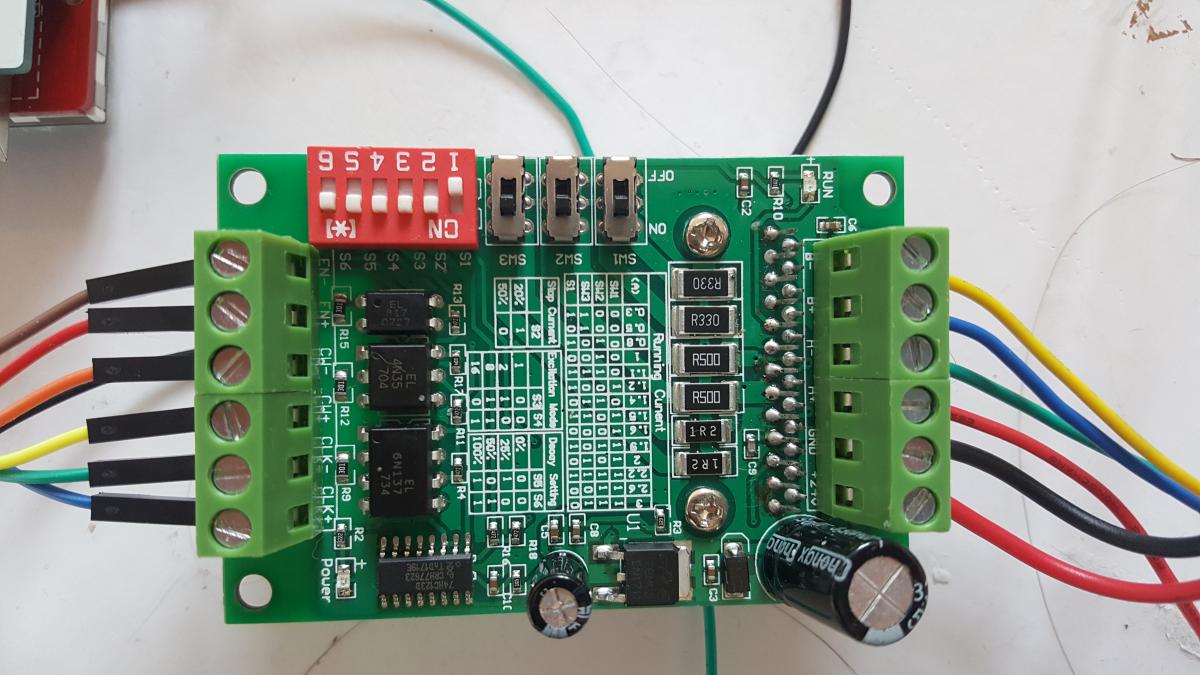
- http://www.robot-maker.com/shop/drivers-d-actionneurs/40-driver-de-moteur-pas-a-pas-tb6560-3a.html?search_query=tb6560&results=2
- http://www.robot-mak...-male-male.html
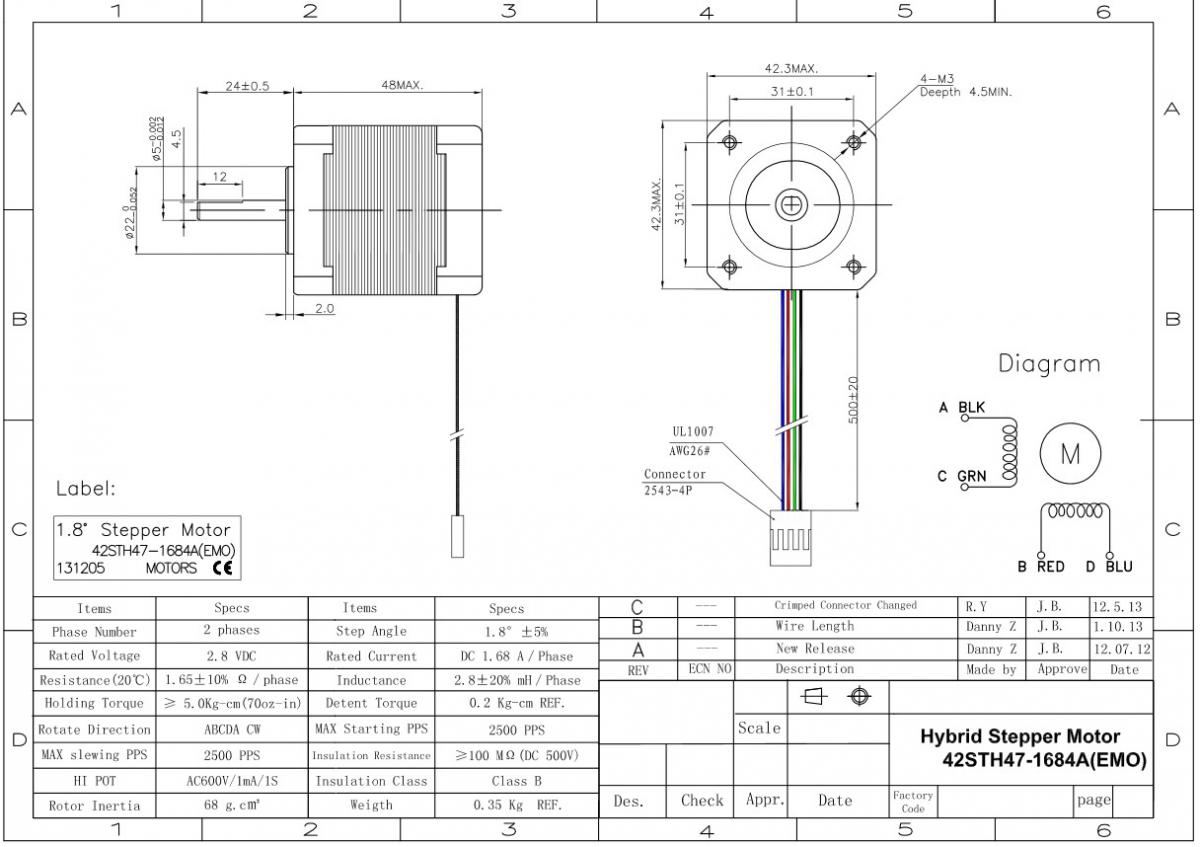
- et 1 moteur nema17
ce montage a été discuté dans ce post mais j'ai une question concernant la configuration du pilote TB6560.
Je viens de consulter ce post.à propos du pilote TB6560, j'ai pu trouver l'explication des différents switchs à régler sur le pilote mais je souhaiterais avoir une valdiation pour mon montage, je proposerais :
SW1 off
SW2 on
SW3 off
S1 off
(je mets 1 A puis plus si pas de soucis)
S2 on (c'est à dire si surcharge de 20% en courant, ça coupe ?)
S3 off
S4 on
(je mets en 1/16 de pas)
S5 ?
S6 ?
pour S5 et S6 je ne vois pas du tout quoi mettre et je ne vois pas non plus leur rôle
Merci pour votre retour.