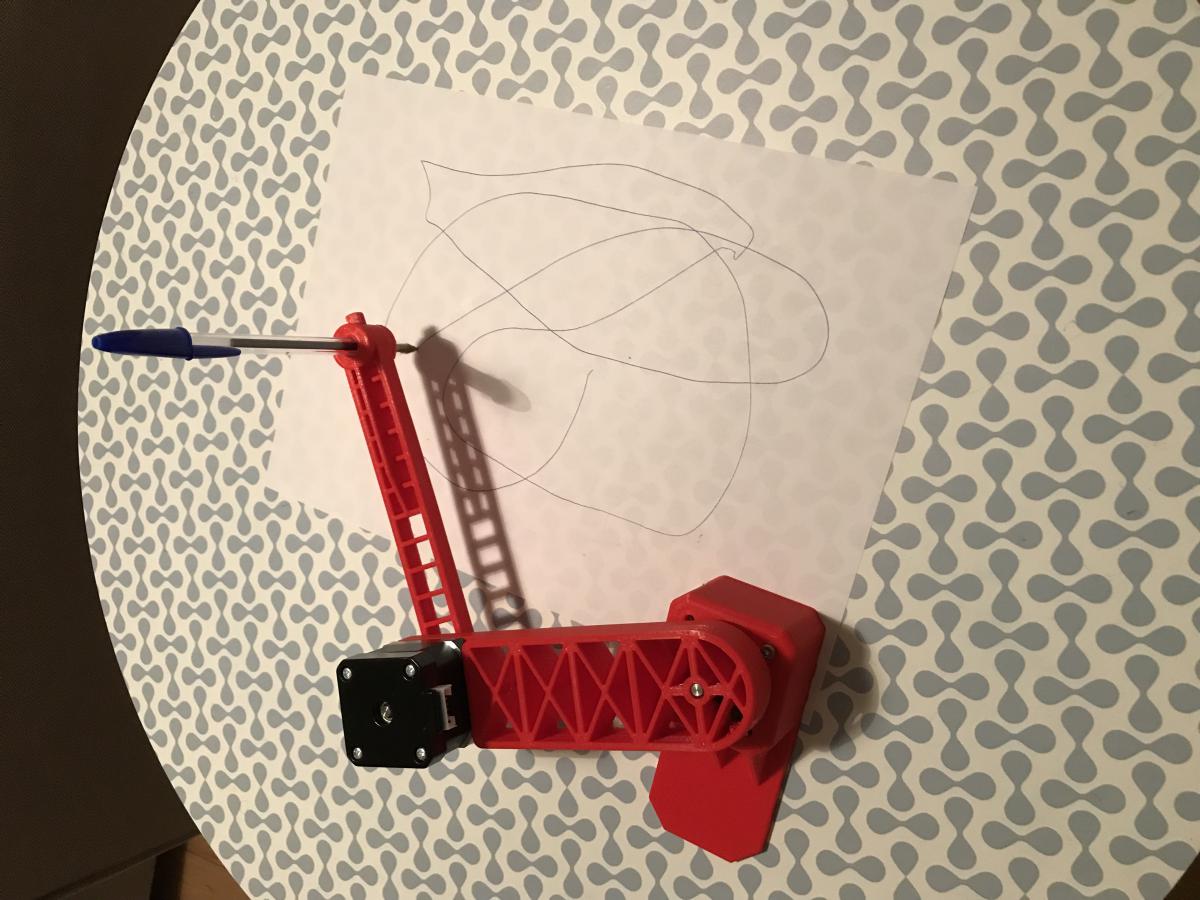
Résultat en image ce matin :



Pilier du forum


Posté 09 avril 2019 - 11:30
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 25 avril 2019 - 08:32
Bonjour à tous,
Petit coup de mou avec ce week end de Pâques je devrais mieux avancer les jours qui viennent !
Voici en photo et vidéo mes maigres avancement :

Objectifs :
Ensuite, dans un second temps :
Voilà le programme 
Membre passionné
Posté 27 avril 2019 - 01:19
Bonjour,
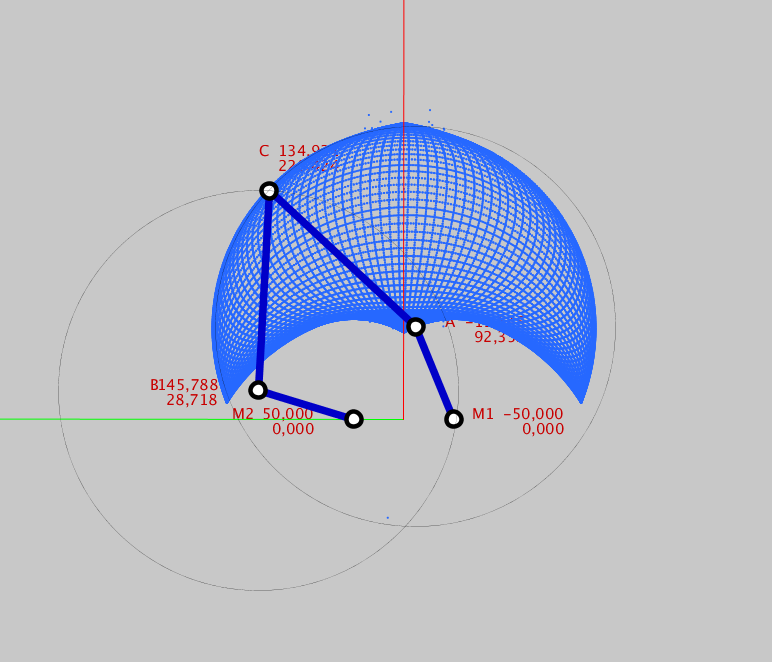
Aujourd'hui petit bricolage rapide afin de tester le couplage Processing/Arduino. L'idée ici est de faire communiquer mon arduino avec une interface graphique codée sur mesure.
J'ai rapidement codé un rectangle vert qui s'allonge ou rétracte en fonction de ce que mesure le capteur ultrason. Tout cela est réaliser grâce à la communication série.
Je veux pouvoir simuler sur mon ordinateur (vidéos que j'ai postées ici) ce que fera le robot sur papier, ça permet premièrement de travailler plus vite car on peut simuler beaucoup de chose sans avoir à passer sur le robot directement.
Deuxièmement, ça permet aussi d'avoir toute la partie "gros calcul" sur l'ordinateur et d'envoyer seulement les résultats à l'arduino et donc avoir un programme vachement plus simple.
Si vous avez des questions n'hésitez pas
Membre passionné
Posté 07 mai 2019 - 10:07
Bonjour,
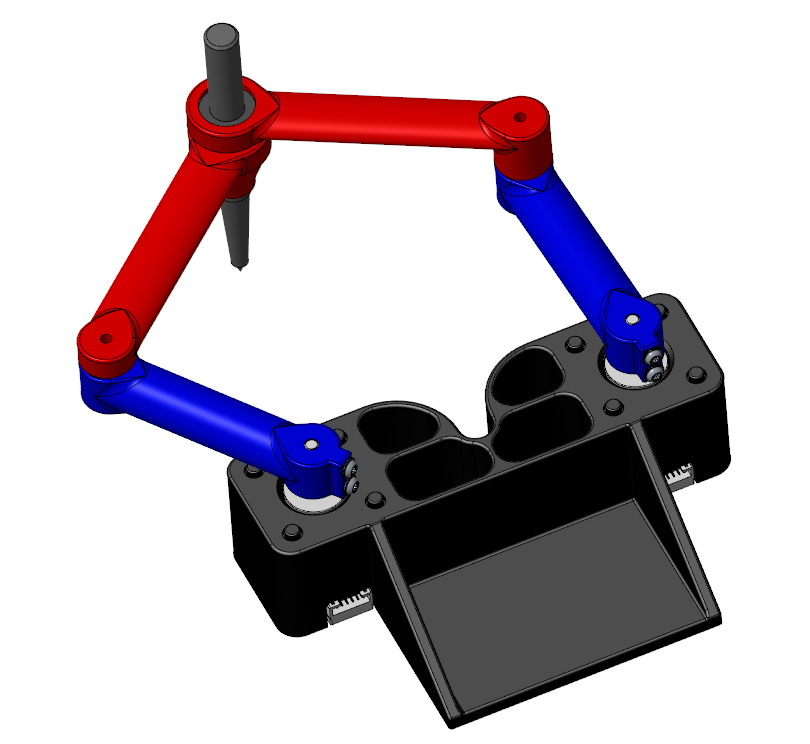
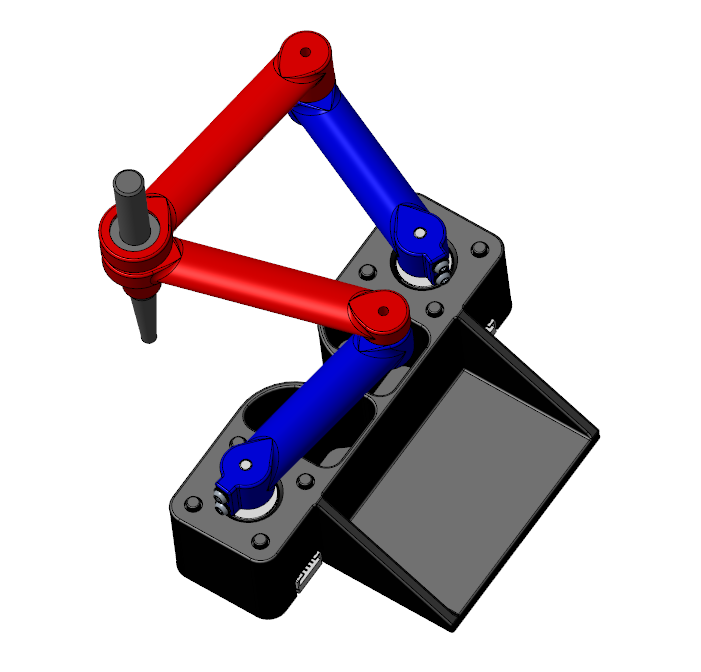
La nouvelle cinématique est au point, toutes les équations fonctionnent, mon code tourne comme sur des roulettes, je n'ai plus qu'à faire une belle petite méca et j'aurais un robot dessinateur fonctionnelle
(Il n'y a pas de changement flagrant entre chaque vidéos/photos que je poste, c'est beaucoup de fiabilisation du code, des maths et de la méthode pour le moment)
Je vais commencer à designer un traceur à mettre en bout de bras, je vais avoir besoin de ressorts 
Membre passionné
Posté 09 mai 2019 - 10:09
Quelques petits updates du code :
L'interface graphique sera encore amenée a être modifié par la suite mais je suis satisfait de ce qu'elle est pour le moment et je sens que tout le monde ici veut que je commence à rentrer plus dans le hardware
PS : Comment on fait pour mettre la vidéo en miniature ?
Staff Robot Maker

Posté 10 mai 2019 - 11:48
tu mets juste le lien youtube au milieu de ton texte sans rien faire de plus.
Pour info il y a cet article qui explique pas mal d'astuces pour publier du contenu sur robot maker dont les fichiers .stl par exemple : publier du contenu sur Robot Maker du coup je te laisse modifier par toi même tous tes messages incluant une vidéo youtube ^^
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Pilier du forum
Posté 10 mai 2019 - 07:52
Bien sûr, mais personnellement, je trouve que ton soft est vraiment bien.je sens que tout le monde ici veut que je commence à rentrer plus dans le hardware
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 10 mai 2019 - 08:16
Staff Robot Maker
Posté 11 mai 2019 - 04:17
Ca n'a pas l'air de fonctionner...
J'ai édité tous tes messages ... J'ai pas rencontré de problème ... Edite un de tes message que j'ai édité et regarde , le " lien youtube " doit être mis en brut sans en faire un lien ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Staff Robot Maker
Posté 23 juillet 2019 - 08:34
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 24 juillet 2019 - 05:48
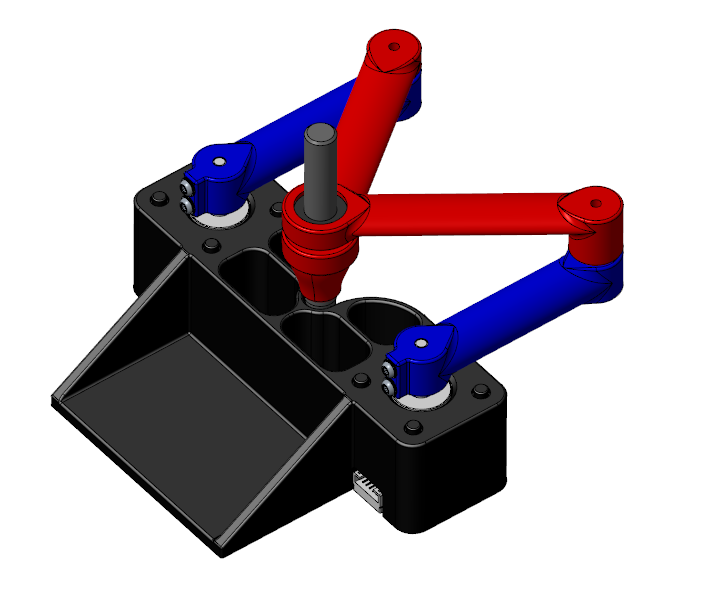
Oui oui ça avance bien, je finalise la mécanique, j'ai passé un peu de temps à modéliser un train épicycloïdal compact, ce qui est chose faite, je ferais un retour lorsque ma CAO sera complète
Membre passionné
Posté 13 août 2019 - 02:52









0 members, 0 guests, 0 anonymous users