Bonjour,
Je vous présente mon projet de bras robotisé 6 axes
La grande priorité du projet sera la maîtrise des coups tout en gardant une bonne fonctionnalité. J'aimerai qu'il ne dépasse pas les 200 euros (hors impressions)
Pour ce faire
-
Afin d’alléger le poids et le coût, le robot va être en grande partie en pièces imprimées 3D ( Support, visserie, roulements, etc …)
-
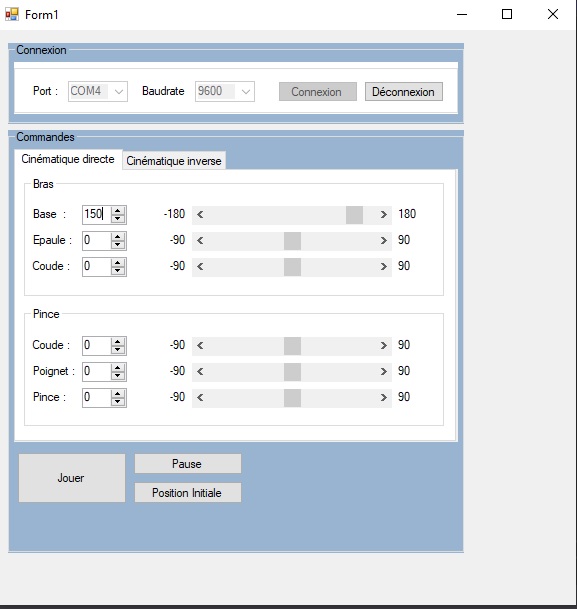
il sera actionné par des Moteurs Nema 17 contrôlé par une carte Arduino Mega couplé au shield Ramps 1,4 et les drivers A4988
J'ai fait le choix des moteur pas à pas Nema 17 pour leurs prix bon marché. On peut en trouver à moins de 40 euros les 5 avec un couple de 4kg/cm.
- L'axe YZ se fera à l'aide d'un moteur avec un rapport de réduction de 1/5 le faisant passer à un couple de 20 kg/cm.
- La première articulation ZX se fera à l'aide de 2 moteurs avec un rapport de réduction de 1/6 qui fera passer le couple à 48 kg/cm.
- Quand au coude, il sera composé de 2 moteurs avec un rapport de réduction de 1/5 (40 kg/cm).
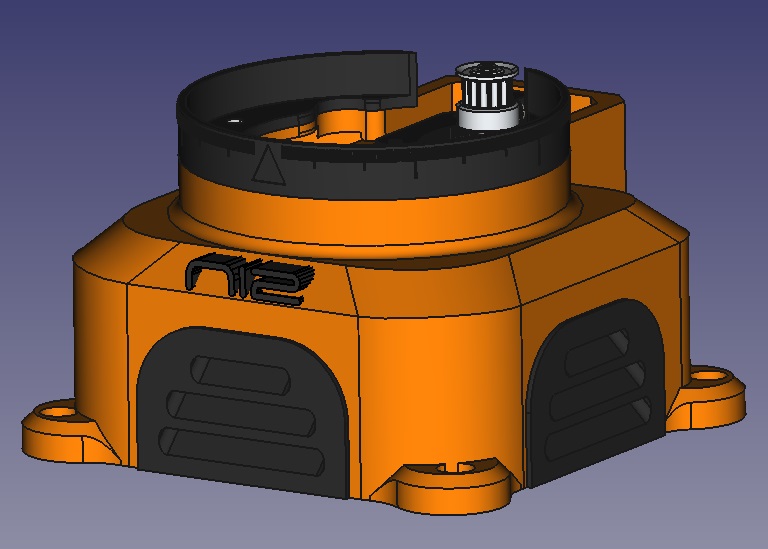
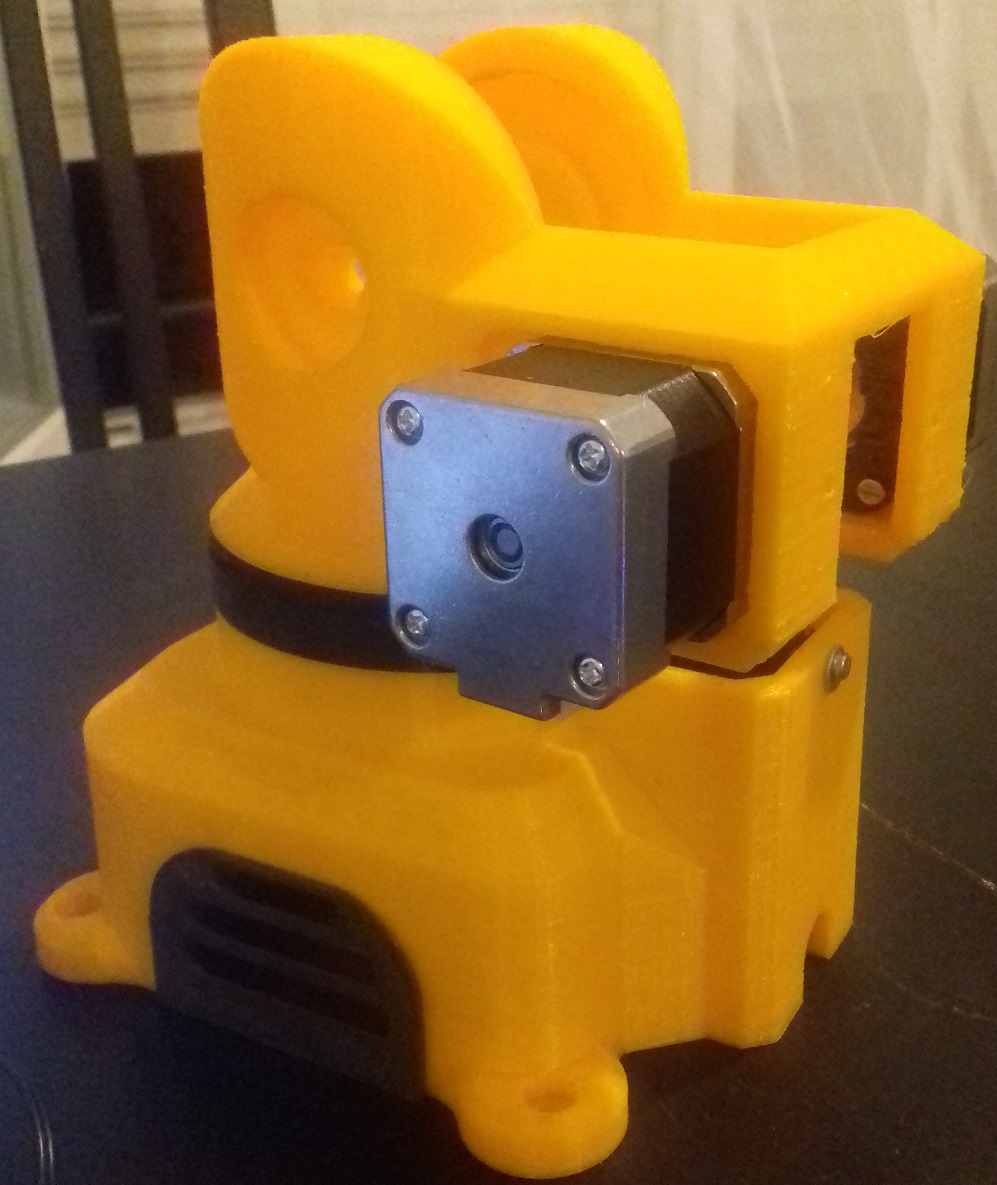
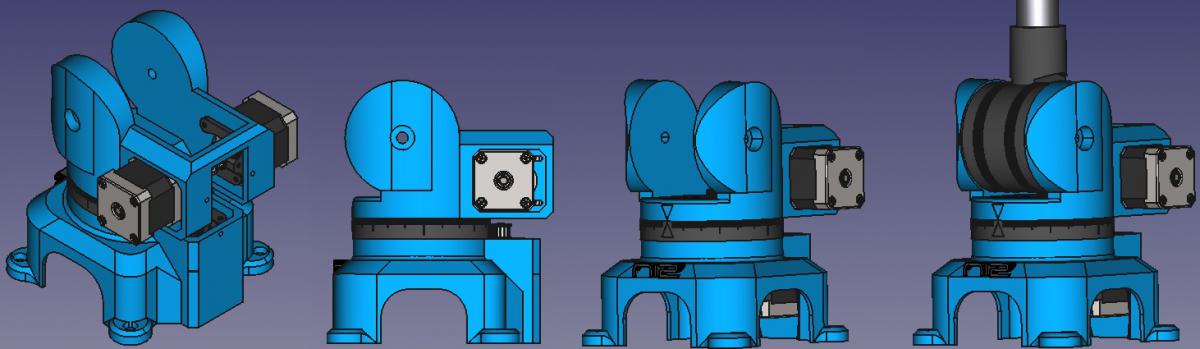
J'ai déjà commencé à modéliser la base du robot,"l'épaule",le bras et quelques roulements et fixations.
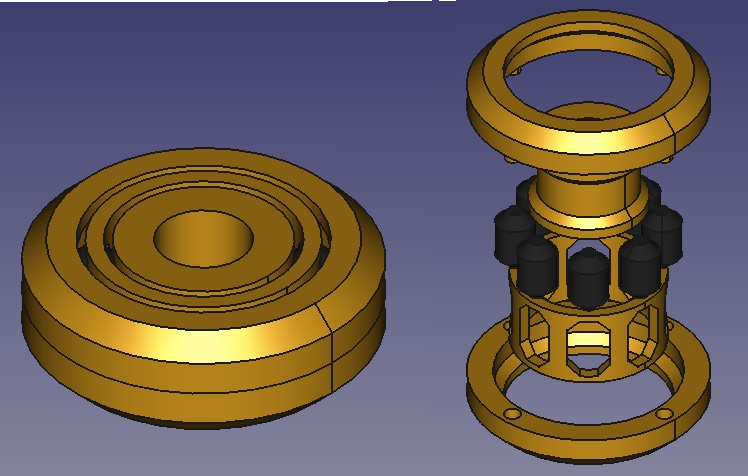
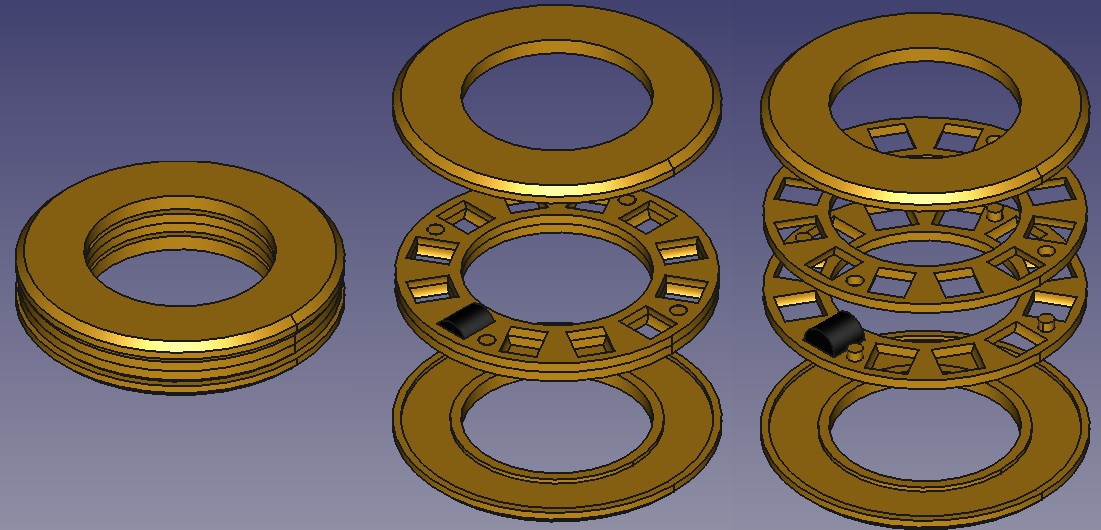
Pour la base, j'ai réalisé une vis avec ecrou, deux butée à rouleaux, un roulement à rouleaux des rivets et une poulie 100 dents
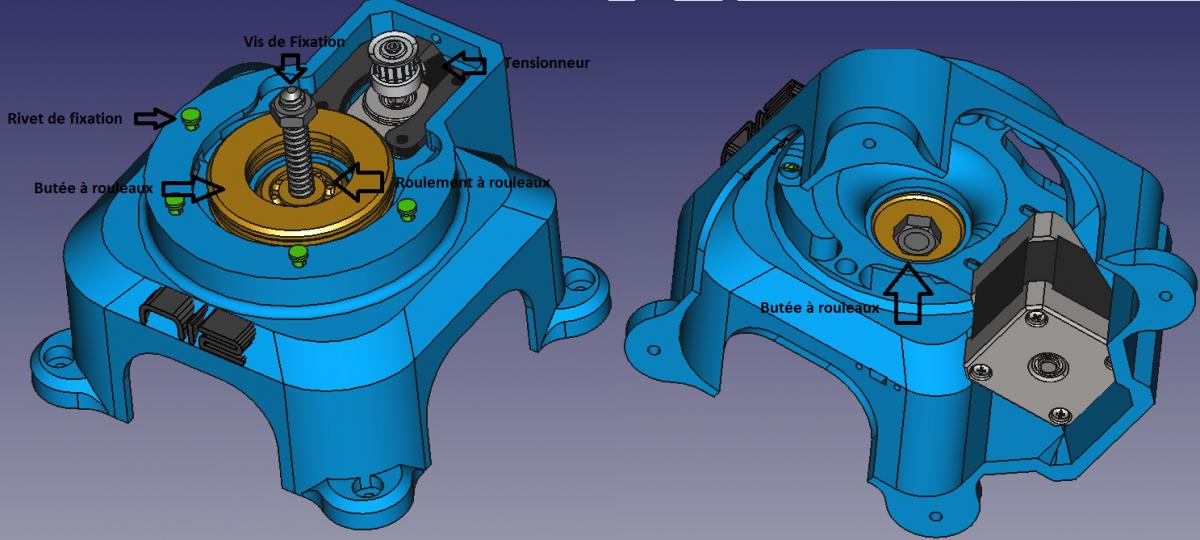
Pour le moment je suis encore en train de peaufiné la base pour ne pas avoir d'erreur de conception et ainsi éviter une impression pour rien



 "
"