Salut tout le monde,
Juste un petit message pour vous dire que mon robot vient de parcourir son premier mètre. 
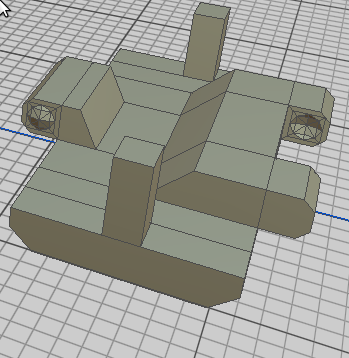
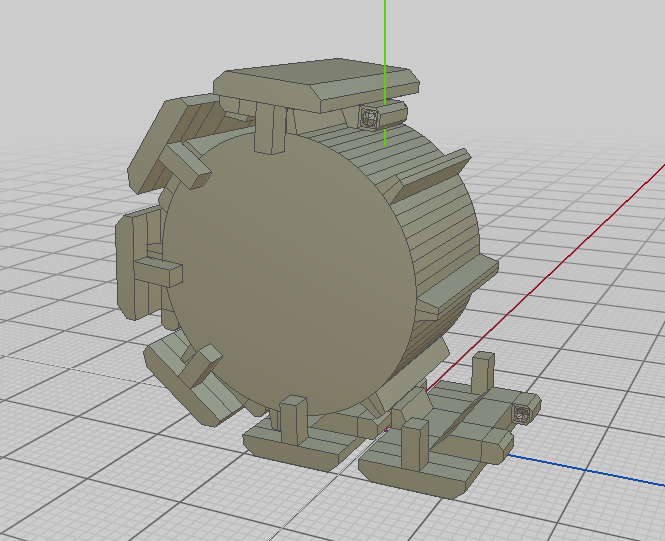
Il n'a pas encore de chenille, donc ça a été barbotins directement sur le sol et avec juste les moteurs de fixés.
Le reste était posé sur le châssis.
Ça avance et recule correctement, mais ça ne tourne pas encore. :/
J'imagine qu'en l'absence de chenilles, les galets de l'avant frottent sur le sol...
J'ai pas compris tout de suite le fonctionnement de la carte L9110, mais c'est vraiment très pratique!
À coté de ça, je lui ai ajouté un buzzer qui permet d’émettre un son continue, de klaxonner et d'envoyer des SOS en morse! 
La LED bénéficie du même code avec en plus un stroboscope. 
Je n'ai pas encore la caméra qui finira dessus.
Celle de test était une veille Logitech qui est beaucoup trop grosse pour la taille du robot.
Je vais peut être tout simplement prendre la camera officiel de Raspberry.
Prochaines étapes :
- je lui fixe un véritable essieu avant car l'actuel est la juste pour le test : trop court pour aligner les galets avant avec les barbotins
- je fixe l’électronique
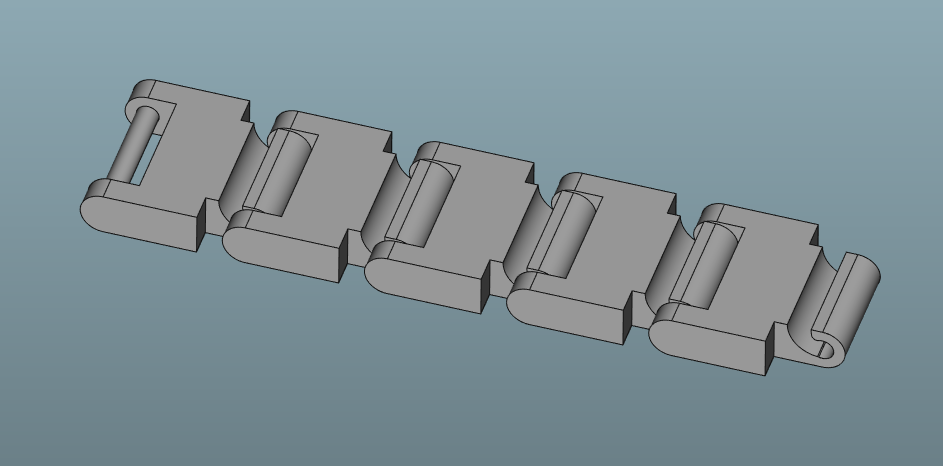
- je trouve les chenilles
- je lui fait une petite carrosserie