Hé bien....
A la base je me suis embarqué dans la construction de ce robot pour m'amuser, et aussi parce que je n'étais pas satisfait des algorithmes d' IA actuels et je souhaitais développer une IA différente.
Les neurones artificiels tels qu'utilisés sont trop gourmands en ressources et limités en fonctionnalités car ils sont très éloignés de ceux que l'on trouve dans notre cerveau, même si on tient compte du fait qu'ils sont 'artificiels'.
Aujourd'hui je me rends compte que la tache est plus ardue qu'il n'y parait.
Bien que j'ai des idées très concrètes d'amélioration des liaisons inter neuronales, j'ai peu d'idées sur la façon dont on pourrait reproduire le codage de l'information de notre cerveau. Et donc je me retrouve coincé.
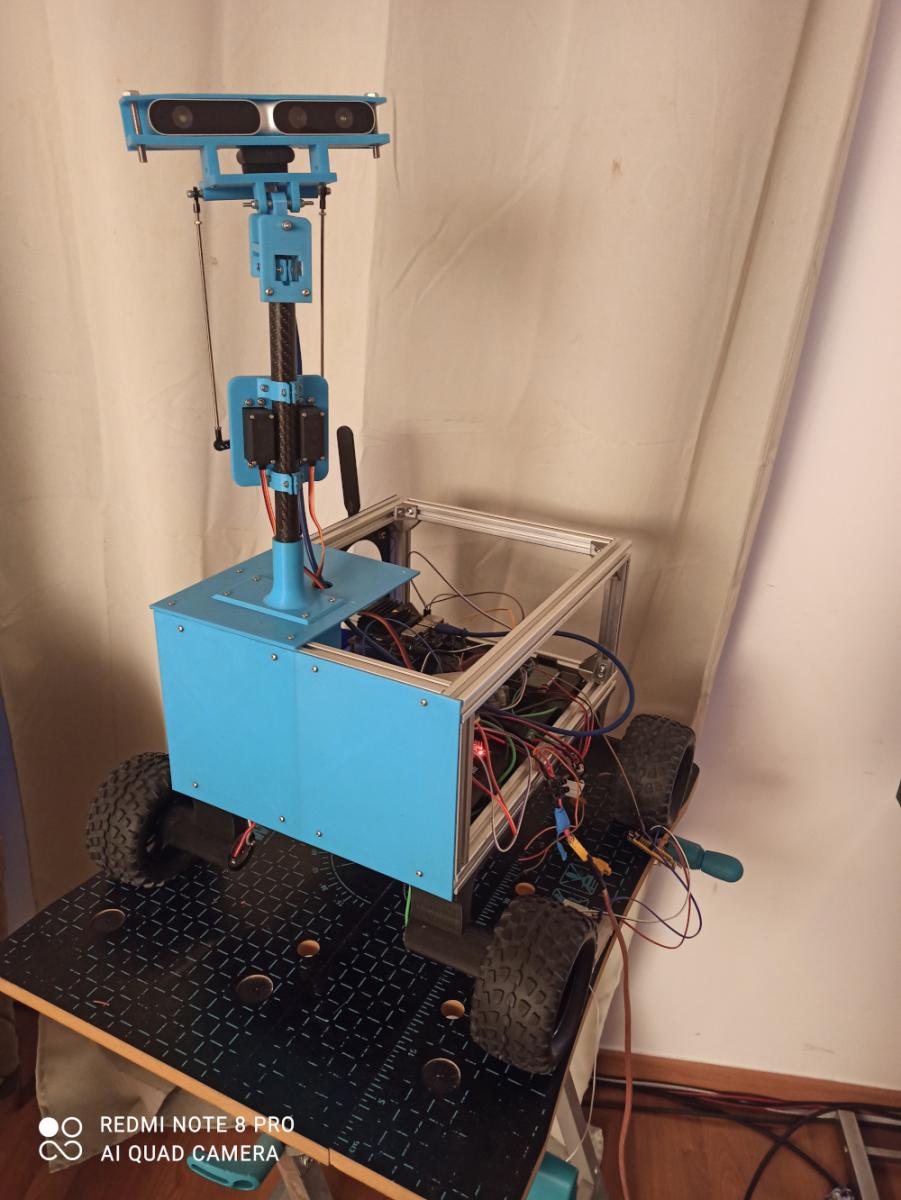
Donc du coup je poursuis Alan sur la base de technologies connues pour m'amuser: ROS pour le fonctionnement, et la localisation dans l'espace, python pour l'interface utilisateur. Du coup même avec des choses simples on peut déjà s'éclater, rajouter de la parole, reconnaissance vocale, etc...
Donc pour résumer votre question, je pense que la mission d'Alan finalement sera finalement bien plus simple : un blog et les explications pour le construire, et le programmer, découvrir Arduino, Python, ... 
Il faut savoir que pour un robot qui possède 4 roues motrices et qui peut porter facilement 10Kg, il ne revient pas si cher en fait.





 et ca fume...
et ca fume...













