BOB3 joue au foot!!!Oui, grande nouvelle, BOB3 s'est inscrit dans un club de foot, il apprend tout juste à manier le ballon rond. Pas très doué pour l'instant, mais ce ne sont que les débuts!
 La VIDEO
La VIDEOBon, plus sérieusement, quelques explications:
Tout d'abord, ça n'est pas très au point, BOB réussi à marquer un but 1 fois sur 5 en moyenne seulement.
Comment ça fonctionne?
1) BOB connait la position du but: il suffit de le placer en position de gardien, et de lui dire de mémoriser cette position.
2) Après l'avoir déplacé n'importe où sur le terrain (en roulant bien sur, pour garder la position), on lui ordonne de jouer au foot.
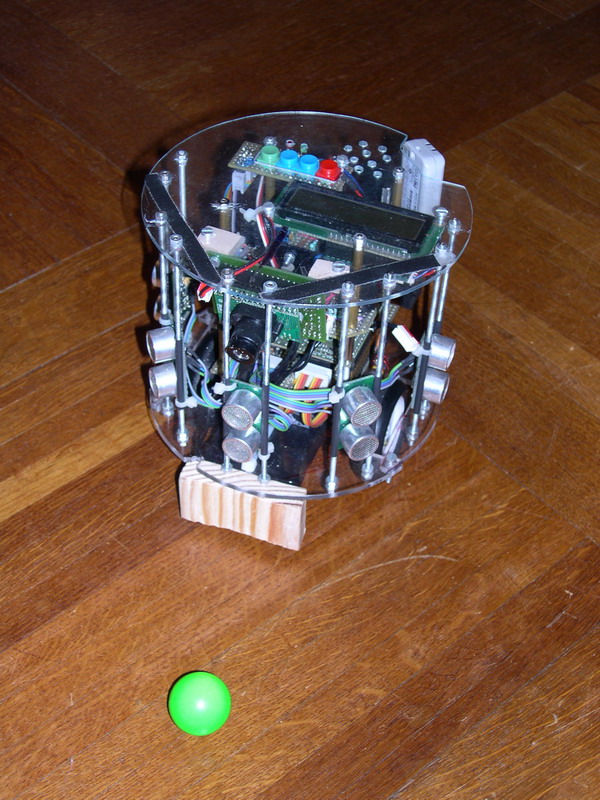
3) Il tourne de 10° en 10° à la recherche de sa baballe verte. Comme vous pouvez le voir, c'est très lent, pas du tout optimisé. C'est grâce à la CMUCAM qu'il repère cette baballe verte. Pourquoi verte? Parce que c'est une couleur bien contrastée sur un parquet teinté "chène" comme chez moi.
4) S'il a repéré la balle, il détermine la position depuis laquelle il doit shooter. Comment?
4.1) déjà, il faut que la balle soit dans un certain angle par rapport au but (60° de part et d'autre de la ligne centrale), sinon, il abandonne. Oui, il ne sais pas encore recentrer une balle.
4.2) La position de tir est sur la ligne entre le centre du but et la position de la balle, à 35cm derrière la balle.
5) Il va à cette position, en évitant les obstacles. Si vous avez suivi l'histoire de BOB3, vous savez qu'il est déjà assez grand pour savoir éviter les obstacles connus. La balle est déclarée comme un obstacle "temporaire", qui sera effacé de la carte juste après l'action (même si détectée par les sonars).
6) il s'oriente vers la balle (ou plutôt la position connue de la balle)
7) il repère à nouveau la balle avec la CMUCAM, se ré-oriente si nécessaire, puis s'il n'est pas trop désaxé...
8) il fonce sur la balle
9) ensuite, sans s'arrêter, il fonce vers le centre du but. L'angle formé par ces 2 bouts de trajectoire ne doit pas être trop grand, sinon, il sait qu'il va perdre la balle.
Bon, le principal problème, c'est que BOB n'est pas archi précis dans ses déplacements. Si je veux continuer à le faire progresser au foot, je pense qu'il va falloir que je revoie complètement l'asservissement... Il y a aussi que la CMUCAM est capricieuse à utiliser, en fonction de l'éclairage. La position estimée de la balle sur le terrain n'est pas non plus super précise, surtout en profondeur si la balle est loin.
Mais bon, malgré ces imperfections, je suis content des progrès réalisés par mon bébé!
Petite modification mécanique: BOB3 a désormais une spatule en bois légèrement incurvée à l'avant, pour pouvoir pousser la baballe. C'est du plus bel effet!

Leon.


























