Robots Pompiers.
Robots Pompiers.J'ai découvert qu'il existait 3 sortes de concours de Robot Pompiers :
(Site)
1/ Chasseur de bougies
Le robot doit éteindre le plus rapidement possible 6 bougies réparties selon un plan précis. La dimension du robot est limitée à 30cm x 30cm x 30cm. Les bougies sont disposées sur un hexagone de 6 mètres de diamètre, donc 2 bougies consécutives sont distantes de 3m. Le motif est disposé au centre d'un espace libre de 10m sur 10m. La position de départ du robot est librement choisie par le concurrent. Le bas de la flamme des bougies est à 12 cm de hauteur, et la hauteur de la flamme est de 4 à 6 cm. Dans l'obscurité, l'intensité lumineuse de cette flamme est de 4 Lux à 1 mètre. L'éclairage ambiant sera de 100 à 200 Lux, avec une forte proportion d'infrarouge.
Le robot a 30 secondes pour éteindre les bougies. Une bougie éteinte compte pour un point. Une bougie renversée fait perdre un demi-point. Au cas où 2 robots ont éteint toutes les bougies, la durée départage les concurrents. Si deux ou plusieurs robots ont le même nombre (5 ou moins) de bougies éteintes dans le temps imparti, le jury départage les concurrents en fonction de l'élégance du trajet.
2/ Tournoi de chasseurs de bougies
Il y a 9 bougies à éteindre, réparties sur un triangle de 9m de côté. Les 2 robots sont placés au départ à 4 m du centre, symétriquement à un sommet, et visant ce sommet opposé. Gagne celui qui éteint le plus grand nombre de bougies. En cas de collision, le robot qui n'a pas essayé d'éviter la collision perd des points. Le renversement d'une bougie fait perdre des points. Ces pénalités sont décidées par le jury au moment du concours, en fonction des difficultés réelles et des comportements éventuellement abusifs de certains robots.
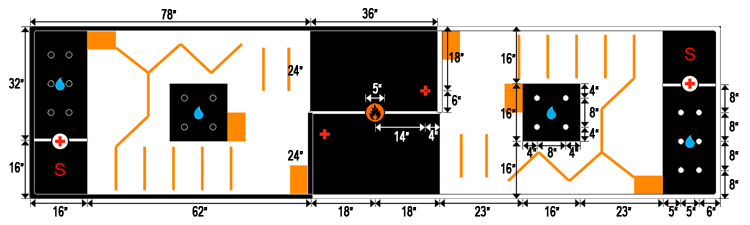
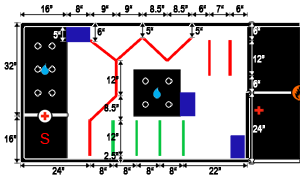
3/ Robot pompier USA
Une bougie est cachées dans l'une de 4 chambres. La géométrie des chambres est connue, mais pas l'emplacement de la bougie dans la chambre (à 10cm du bord au minimum).
La bougie utilisée pour le concours est une petite lampe à pétrole, dont la flamme reste à la même hauteur. Une bougie de 10 à 15 mm de diamètre peut être utilisée à la place. Pour le concours aux USA, la bougie a un diamètre de 25 mm et la hauteur de la flamme descend en cours de concours de 20 cm à 15 cm
Il existe un site qui présente le concours aux US.


Ce qui serait intéressant c'est d'étudier un robot pompier pour savoir comment il arrive à atteindre son but, comment il arrive à trouver la bougie (capteur de température, capteur de luminosité, etc.).
Je vais essayer de trouver un site où quelqu'un présente son robot.
Si vous avez des liens vers d'autres concours de ce style, des descriptions de ce robots, n'hésitez pas à nous en faire part.