Je reviens sur un post au sujet de la SSC 32 et les Entrees Analogiques.

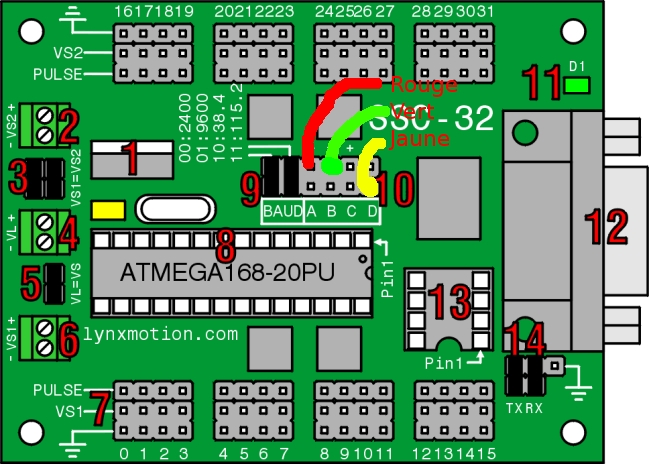
Voir carte SSC 32 jointe.
J'ai acheté ce type de capteur sur Ebay (fichier joint) ou lien Ebay Mon lien (voir bas de la page)
Sur le capteur, il y'a 3 fils :
1 rouge : +
1 vert : -
1 jaune pour le signal.
Alors, ma question est la suivante, vous devez vous en douter... Comment branche ton ce capteur étant donné que si l'on regarde le schéma de la carte ( partie n°10), on a donc ABCD (qui si je ne me trompe correspond aux 4 ports analogique de la carte) avec seulement un + et un -.
Mais ou va donc mon 3e fil jaune, le fameux signal de mon capteur...
Et bien justement je n' sais pas .