salut a toi ,
si tu regarde plus bas dans le forum , je cree un robot suiveur de ligne noire aussi. je ne l ai pas encore finis car j attends, ma derniere livraison . j ai eu des problemes sur mon robot , car j ai utiliser une plaque d essais (alors que je ne savais pas m en servir )au lieu d un circuit imprime (ceux qui m aurais fais gagner du temps). beaucoup de volontes du cote des internautes

. moi perso je suis debutant , donc pour ton plans je n en sait rien . desole. sinon moi je me base sur ceci :
http://www.robot-maker.com/image/images/567bs2mvcf.jpg
je vais juste te mettre l explication de black templar (internaute) pour le shema qui se trouve vers le bas , du fichier joint :
http://www.robot-maker.com/image/images/34b6kldy7w.JPG
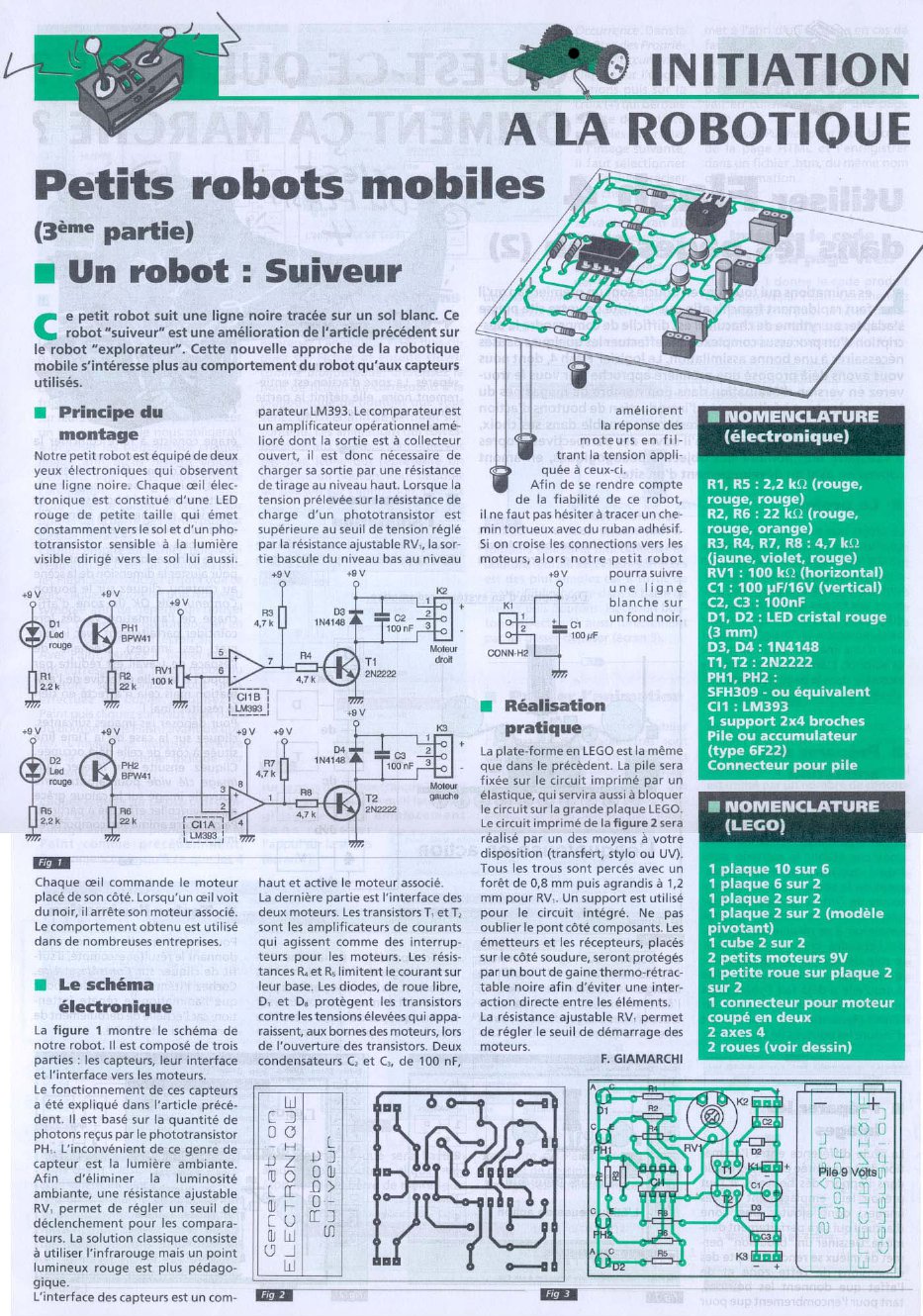
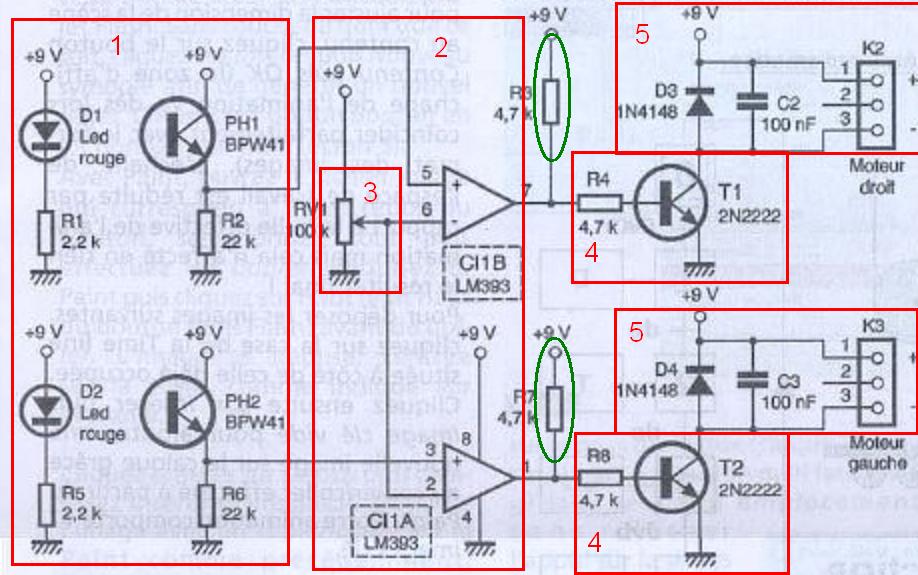
Partie 1 :
La partie numéro une du montage sont tes capteurs. Ici, ils sont composés d'une diode qui émet de la lumière vers le sol et d'un récepteur lumineux qui va détecter la lumière renvoyé par le sol. (Il faut bien faire attention que la diode n'éclaire pas directement le capteur, sinon, l'effet désiré n'aura pas lieu)
Personnellement, j'aurais pris une diode et un récepteur infrarouge (et non rouge). De plus, il existe déjà de tels types de capteurs tout en un ! Je te donnerais les références ce soir.
Du coup, sur ton montage, quand le récepteur lumineux reçois de la lumière, il laisse passer le courant. A la sortie de ton capteur tu auras alors 9V (8.4V plutôt) lorsque celui-ci reçoit beaucoup de lumière, 0V s'il n'en reçoit pas et entre 0 et 9V s'il reçoit moyennement de lumière.
Partie 2 :
La seconde partie du montage est construit autour d'un composant appelé amplificateur opérationnel. Ce composant est un petit peu compliquer à comprendre. Ce que tu as besoin de savoir, c'est que celui-ci est monté en mode comparateur.
C'est à dire qu'il va comparer la tension entre la borne + et -.
Si la tension sur la borne + est supérieur à celle sur la borne -, alors la sortie de l'amplificateur opérationnel (borne 1 et 7) sera à 9V, sinon, elle sera à 0V.
Tu connais déjà la tension sur la borne + (c'est celle qui est en sortie des capteurs, donc entre 0V et 9V en fonction de la quantité de lumière reçue)
Pour la tension de comparaison (sur la borne -), elle est déterminée par le potentiomètre (la résistance variable que j'ai numéroté 3) Tu peux donc régler toi même la valeur de la tension de comparaison en réglant le potentiomètre. Cette tension peut donc varier de 0 à 9V. Plus cette tension de comparaison est faible et plus le capteur sera sensible et inversement, plus la tension de comparaison est forte et moins le capteur sera sensible.
La sortie de l'ampli op sera donc soit 0V, soit 9V en fonction que tu te trouve d'un côté ou de l'autre du seuil.
Partie 4 :
La partie 4 est un simple transistor qui va commander tes moteurs. Si la tension à la sortie de l'ampli op est de 9V, alors le transistor est activé et le courant passe du haut vers le bas, sinon, si la tension qui va commandé le transistor (tension à la sortie de l'ampli op) est à 0V, alors le courant ne passe pas et les moteurs ne tournent pas.
Partie 5 :
La partie 5 semble compliqué, mais en fait,il n'en est rien.
Pour le principe, (pour bien comprendre), tu peux supprimer la diode ainsi que le condensateur. Tu vois donc bien qu'il ne te reste qu'un moteur branché au 9V d'un côté et au transistor de commande de l'autre.
Le condensateur sert à "lisser" la tension au borne du moteur. En effet, tu vois bien qu'avec ce montage, le moteur tourne soit à pleine puissance, soit ne tourne pas. Il n'y a pas d'étapes intermédiaires. Du coup, c'est un peu brusque pour le moteur (de passer de 0 à 9V directement et inversement). On ajoute donc un condensateur en parallèle afin de "lisser" la tension. Maintenant, lorsque l'on passe brusquement de 0 à 9V, le condensateur se charge d'abord, ce qui permet de délivrer une tension progressive dans les moteur.
Pour ce qui est de la diode, c'est une simple diode de protection (mais qui est indispensable). Le moteur étant une source de courant, il est dangereux de passer brusquement de 9 à 0V. En effet, le moteur voudra continuer à avoir de l'énergie. La diode est donc une diode de roue libre protégeant ton circuit contre un éventuel crammage. (le courant tournera en boucle dans le moteur en passant par la diode jusqu'à épuisement de l'énergie)
si tu as une question sur le fichier , n hesite pas
.



 schéma elec robot suiveur de ligne.bmp 76,93 Ko
686 téléchargement(s)
schéma elec robot suiveur de ligne.bmp 76,93 Ko
686 téléchargement(s)





















{kind=link}
{kind=link}