dévoilertous !
A mon tour d'avoir mon Cocotix.
Petit résumé :
Aujourd'hui (hier en fait parce qu'il est plus de 4h du mat' là) courses avec papa et maman et enfin j'ai mon multimètre et double mallettes de soudure (outils différents et pas super chère alors :D ), et là je viens de finir ma commande des composants, donc dès que je reçois tout ça b'un je vous tiens au courant.
Mon cerveau m'indique que mon Cocotix sera sûrement différent physiquement par rapport à la coccinelle mais bon on le découvrira ensemble :)
Le modèle de référence : Cocotix V2
Le nom : Simple contraction entre le diminutif de mon pseudo acolyte (aKo respecter minuscule/majuscule/minuscule) et Cocotix, donc aKoCotix.
La liste des composants utilisé sera faite lors de leur réception (oui oui, c'est les mêmes que ce du tuto "presque").
Voilà je pense que c'est tout ce que je dévoiler peux dire pour le moment :p
P.S. : Pour ce qui ne savent pas W.I.P. est l'acronyme de l'expression anglaise Work In Progress.

[W.I.P.] aKoCotix
Débuté par Acolyte, janv. 03 2010 04:21
4 réponses à ce sujet
#2

Glius
-

- Membres
-

- 157 messages
Habitué
Posté 03 janvier 2010 - 10:16
Eh bien nous attendons avec impatiences de voir ça ;)
Mais n'oublie pas de dormir aussi ! :tare:
Mais n'oublie pas de dormir aussi ! :tare:
#3
Acolyte
-
- Membres
- 3 messages
Nouveau membre
Posté 09 janvier 2010 - 12:19
bon voilou, j'ai reçu mes composant hier, ormis le support de pile j'ai tout !
j'ai fais trois fois le montage des roues aucun ne marche :p
donc je suis en plein débug :)
j'ai fais trois fois le montage des roues aucun ne marche :p
donc je suis en plein débug :)
#4
miky-mike
-

- Membres
-
- 1â¯232 messages
Pilier du forum
- Gender:Male
- Location:Belgique
Posté 09 janvier 2010 - 01:01
Bonne m@rde pour le debug
#5
Acolyte
-
- Membres
- 3 messages
Nouveau membre
Posté 11 janvier 2010 - 01:18
Bonjour !
J'ai essayé de réfléchir et j'ai mis cela en commentaire sur le tuto :
J'ai essayé de réfléchir et j'ai mis cela en commentaire sur le tuto :
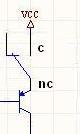
euh je voudrais pas dire de bétises mais je ne suis absolument pas d'accord avec ce schéma :
Pour moi le C (commun est en bas) le NC (normally close) est en haut à gauche et le NO (normally open) est en haut à droite,
Et donc :
Le courant circule de "C" à "NC" quand l'interrupteur ne détecte pas d'obstacle : le moteur tourne normalement et le robot avance tout droit.
NC n'est relié à rien !? Vcc n'est pas censé être sur NC (en haut à droite) et pas en haut à gauche ?
Maintenant, imaginons que l'interrupteur détecte un obstacle. (donc le courant passe entre C et NO)
Le courant circule donc de "C" à "NO" ou plutôt, il ne circule plus, puisque "NO n'est branché à aucun fil". (donc sur l'image c'est bien en haut à gauche, non ?)
Conclusion : le moteur s'arrête.
Les fils des interrupteurs seront comme dans la V1 du robot, croisés. (b'un si j'ai compris j'ai raison, sauf que dans la V1 le NO est branché sur une pile inversé pour reculer).
J'ai bon :D ? ou j'ai rien compris ?








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




