
Bonjour je voudrai savoir si ce type de servomoteur a besoin d'une modification pour l'utiliser comme un moteur commander par la carte arduino comme sur le robot "Roby"
Voici le lien :
http://www.lextronic.fr/P1844-servomoteur-a-rotation-continue.html

16 réponses à ce sujet
#2

Esprit
-

- Membres
-

- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 18 février 2011 - 07:53
"Servomoteur à rotation continue...
Ne disposant d'aucune butée, ce servomoteur tourner dans les 2 sens de façon continue. Ainsi pour une largeur d'impulsion de l'ordre de 1,5 ms à son entrée, le servomoteur sera à l'arrêt."
Pas besoin de modifications.
Il peut faire 360°.
Ne disposant d'aucune butée, ce servomoteur tourner dans les 2 sens de façon continue. Ainsi pour une largeur d'impulsion de l'ordre de 1,5 ms à son entrée, le servomoteur sera à l'arrêt."
Pas besoin de modifications.
Il peut faire 360°.
#4
jady2909
-
- Membres
- 37 messages
Nouveau membre
Posté 19 février 2011 - 08:24
"Servomoteur à rotation continue...
Ne disposant d'aucune butée, ce servomoteur tourner dans les 2 sens de façon continue. Ainsi pour une largeur d'impulsion de l'ordre de 1,5 ms à son entrée, le servomoteur sera à l'arrêt."
Pas besoin de modifications.
Il peut faire 360°.
peut tu m'en dire plus stp
#5
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 19 février 2011 - 08:34
Servomoteur.
C'est important d'apprendre à chercher par soi-même. Ça évite d'être dépendant d'autrui.
C'est important d'apprendre à chercher par soi-même. Ça évite d'être dépendant d'autrui.

#8
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 23 février 2011 - 06:11
Si tu veux qu'on te dise s'il est important ou non de trouver le neutre, alors demande ça directement. ^^
Il y a tellement à dire sur un servomoteur qu'on ne peut pas prendre le temps d'envoyer des infos "en vrac" en espérant répondre à ta question.
En effet, trouver le neutre est important.
Petite astuce, pour trouver le neutre "mécaniquement", tu peux brancher le 5V et le Gnd sur ton servomoteur et il se mettre directement au neutre, même sans signal. ;)
Il y a tellement à dire sur un servomoteur qu'on ne peut pas prendre le temps d'envoyer des infos "en vrac" en espérant répondre à ta question.
En effet, trouver le neutre est important.
Petite astuce, pour trouver le neutre "mécaniquement", tu peux brancher le 5V et le Gnd sur ton servomoteur et il se mettre directement au neutre, même sans signal. ;)
#9
Luj
-

- Membres
-
- 295 messages
Habitué
- Gender:Not Telling
Posté 24 février 2011 - 11:53
Esprit, une fois le servo modifié, es-tu sûr qu'il se met encore au neutre ? Comme Jady a acheté des servos déjà modifiés, il ne fait pas la manip' lui même et ne peut pas la repérer. La seule solution me semble donc de faire un petit programme pour changer petit à petit les valeurs de commandes, et déterminer pour laquelle le moteur s'arrête : c'est le neutre.
Malheureusement ce n'est pas toujours 1,5 ms car cela dépend de la qualité des résistances utilisées pour modifier le servo (ou alors je suis pas doué).
Malheureusement ce n'est pas toujours 1,5 ms car cela dépend de la qualité des résistances utilisées pour modifier le servo (ou alors je suis pas doué).
#10
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 24 février 2011 - 01:41
C'est une bonne question... Je ne sais pas si comment les servos sont modifiés dans ce cas-ci. Et je n'ai encore jamais essayé avec un de ces que j'ai modifié de remettre le neutre en mettant le +5V et le Gnd. Je peux tester ce soir.
#11
jady2909
-
- Membres
- 37 messages
Nouveau membre
Posté 27 février 2011 - 01:16
de tout façon jai commander mes servomoteur comme je vous et fait montrer et jai pris aussi un capteur infrarouge http://www.lextronic.fr/P1749-telemetre-infrarouge-sharp-gp2d120.html
je voudrai faire un roby modifier a ma façon.
je vous tiendrai au courant consernantles servomoteur.
Pour se qui est la programation en c++ je debut est je connais les bases (un mois que je lis plusieur site que vous m'avez donner pour la programation)Sa devrai aller pour l'instant, je mettrai des photos de mon "robjady"
je voudrai faire un roby modifier a ma façon.
je vous tiendrai au courant consernantles servomoteur.
Pour se qui est la programation en c++ je debut est je connais les bases (un mois que je lis plusieur site que vous m'avez donner pour la programation)Sa devrai aller pour l'instant, je mettrai des photos de mon "robjady"
#12
jady2909
-
- Membres
- 37 messages
Nouveau membre
Posté 27 février 2011 - 01:44
[quote"Luj"]Esprit, une fois le servo modifié, es-tu sûr qu'il se met encore au neutre ? Comme Jady a acheté des servos déjà modifiés, il ne fait pas la manip' lui même et ne peut pas la repérer. La seule solution me semble donc de faire un petit programme pour changer petit à petit les valeurs de commandes, et déterminer pour laquelle le moteur s'arrête : c'est le neutre.
Malheureusement ce n'est pas toujours 1,5 ms car cela dépend de la qualité des résistances utilisées pour modifier le servo (ou alors je suis pas doué).[/quote]
Juste une petite question est ce que je doit prendre un rapporteur a fin de mesuré l'angle de rotation ? ainsi j'aurai la valeur du neutre des servomoteur.
Malheureusement ce n'est pas toujours 1,5 ms car cela dépend de la qualité des résistances utilisées pour modifier le servo (ou alors je suis pas doué).[/quote]
Juste une petite question est ce que je doit prendre un rapporteur a fin de mesuré l'angle de rotation ? ainsi j'aurai la valeur du neutre des servomoteur.
#13
Luj
-
- Membres
-
- 295 messages
Habitué
- Gender:Not Telling
Posté 27 février 2011 - 08:50
angle de rotation ? je ne vois pas ce que tu veux mesurer.
La seule chose à mesure, c'est la vitesse pour chacune des consignes que tu vas envoyer au servo.
Un graphique comme celui-ci mais il faut de l'électronique de mesure :
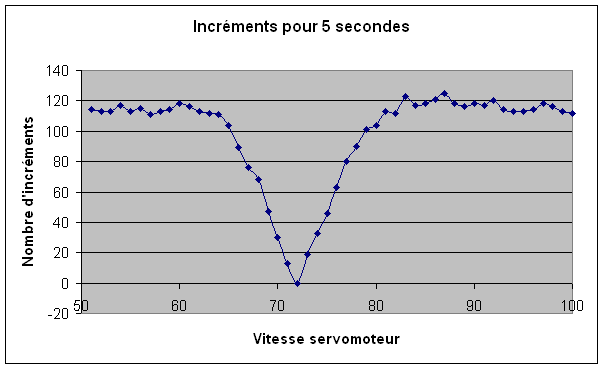
On peut y voir que le neutre n'est pas à 90 (la valeur de la commande envoyée au servomoteur entre 0 et 180, ce qui correspond donc à 1,5ms) mais 72. D'ailleurs selon la qualité de la modification on peut très bien ne plus avoir de position d'arrêt et voir la roue tourner très lentement. C'est pour ça que je conseille une modification différente des autres sites, où c'est le potentiomètre d'origine qui est conservé et calé sur 0 à la main de telle sorte que le moteur ne tourne plus.
La seule chose à mesure, c'est la vitesse pour chacune des consignes que tu vas envoyer au servo.
Un graphique comme celui-ci mais il faut de l'électronique de mesure :
On peut y voir que le neutre n'est pas à 90 (la valeur de la commande envoyée au servomoteur entre 0 et 180, ce qui correspond donc à 1,5ms) mais 72. D'ailleurs selon la qualité de la modification on peut très bien ne plus avoir de position d'arrêt et voir la roue tourner très lentement. C'est pour ça que je conseille une modification différente des autres sites, où c'est le potentiomètre d'origine qui est conservé et calé sur 0 à la main de telle sorte que le moteur ne tourne plus.
#14
jady2909
-
- Membres
- 37 messages
Nouveau membre
Posté 27 février 2011 - 12:22
je decide de mettre ce programme
1.#include
2.
3.#define SERVOG 1
4.#define SERVOD 0
5.
6.Servo servog;
7.Servo servod;
8.
9.int getNeutral(int s)
10.{
11. if(s == SERVOG)
12. return 86; //cette valeur va varier jusqu'a ce que le servomoteur va arrété
13. else
14. return 84; // pareille pour ici
15.}
1.#include
2.
3.#define SERVOG 1
4.#define SERVOD 0
5.
6.Servo servog;
7.Servo servod;
8.
9.int getNeutral(int s)
10.{
11. if(s == SERVOG)
12. return 86; //cette valeur va varier jusqu'a ce que le servomoteur va arrété
13. else
14. return 84; // pareille pour ici
15.}
#16
julkien
-

- Membres
-
- 1â¯032 messages
Membre chevronné
- Gender:Male
Posté 27 février 2011 - 02:41
heu pour commencer la fonction loop est une boucle qui recommence sans fin donc si tu l'intergre pas dans ton code il ne feras pas grand chose
int monetat = false // mon état physique apres un samedi soir trop arrosé ;) :
void loop(){
if (monetat == false) {
// si mon etat est egale a false"off" on le met a "on":
monetat = true;
}
else {
// si mon etat est egale a true"on" on le met a "off":
monetat =false ;
}
}[/code]
bon c'est qu'un exemple mais mon etat va passer de "on" a "off" et de "off" a "on" sans fin (comme un dimanche la tete dans le c...) :mort:
PS: utilise les balise pour présente ton code il seras que plus lisible
et évite les double post les gens aime pas trop ça ici ;) on en fait tous lexpérience
int monetat = false // mon état physique apres un samedi soir trop arrosé ;) :
void loop(){
if (monetat == false) {
// si mon etat est egale a false"off" on le met a "on":
monetat = true;
}
else {
// si mon etat est egale a true"on" on le met a "off":
monetat =false ;
}
}[/code]
bon c'est qu'un exemple mais mon etat va passer de "on" a "off" et de "off" a "on" sans fin (comme un dimanche la tete dans le c...) :mort:
PS: utilise les balise pour présente ton code il seras que plus lisible
et évite les double post les gens aime pas trop ça ici ;) on en fait tous lexpérience
#17
Esprit
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 28 février 2011 - 04:15
Jady, j'aimerais que tu fasses un petit effort pour utiliser les balises. Si tu ne sais vraiment pas comment, tu peux "citer" le message de quelqu'un qui les utilise pour voir comment il a fait.
Ensuite, tu dois aussi éditer tes messages plutôt que de faire des double post à tour de bras. Ça ne sert à rien de réécrire juste à la suite de ce que tu viens de mettre.
Ensuite, tu dois aussi éditer tes messages plutôt que de faire des double post à tour de bras. Ça ne sert à rien de réécrire juste à la suite de ce que tu viens de mettre.
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

