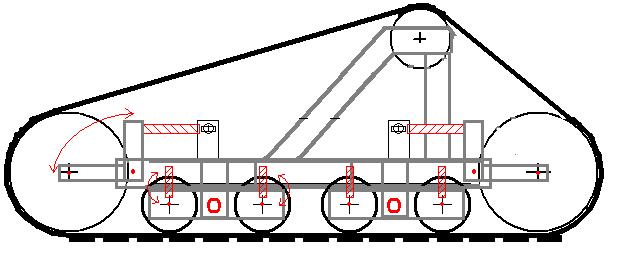
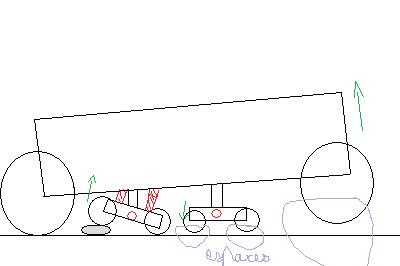
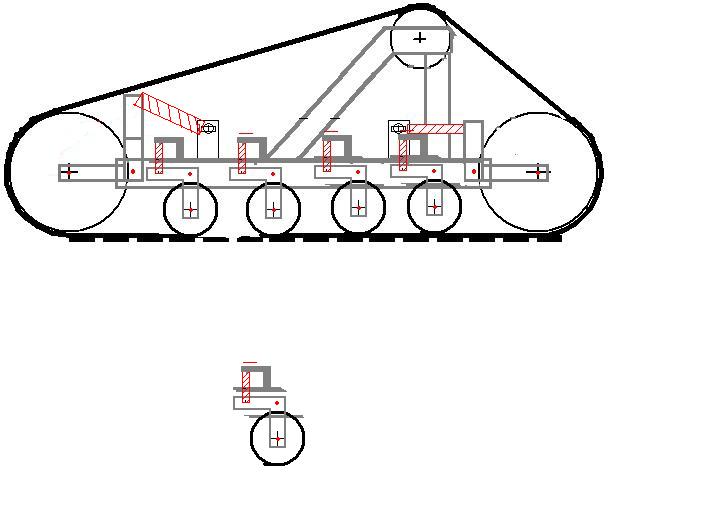
voici un schéma de la réalisation que je compte faire, en rouge ce sont des ressorts en compression.
En gris c'est des morceaux en aluminium.
les point rouges ce sont les axes sur lesquels pivotens les supports des roues ou les axes des roues.
La petite roue du dessus est la seule route motrice de la chenille.
l'entre axe fait 47cm, la chenille est faite maison a partir de charnières vissées entre elles.
le robot sera (devra) être assez lourds 10 a 15kg.
Il s'agit bien de ressort et non de systeme d'amortisseur complet.
Que pensez vous de l'arrangement du dispositif ?
et que pensez vous de toute cette chenille ?
merciii