

Dit nous en plus, ca doit interressé pas mal de gens.... surtout moi !
(bout de code, librairie, source...) Merci !!
Ca marche
 :
:(Sinon à la fin du robot je vais faire un gros récapitulatif de ce qui a été fait : Théorie sur les roues, lien pour télécharger la modélisation sur SolidWorks faite par un ami, quelques expériences faites (Détermination de Phi des moteurs, réglages correcteurs, peut-être usure des pneus) et puis bien sûr le fonctionnement de la télécommande + L298 et autres surement ^^. Mais bon il sera pas finit avant un petit moment vu comment je cale en ce moment donc j'vais prendre un peu d'avance pour la télécommande. Un vrai petit projet quoi, c'est quand même un TIPE à la base
 .)
.)La télécommande :
Matériel : Télécommande 2.4GHz à 4 Canaux GWS
Info : Lien de l'objet sur Robot Shop
Pour l'utiliser sur notre robot, on a voulu passer par la Arduino de cette façon là (Sans correcteur) :
Utilisateur --> Radiocommande --> Arduino --> Moteur
Principe :
Le récepteur radio envois un signal électrique carré d'amplitude constante mais de rapport cyclique variable, c'est ce rapport cyclique qui sera "lu" par la Arduino et interprété par la suite. Pour lire ce rapport cyclique, j'utilise la fonction 'pulseIn(pin, HIGH)' qui me renvois des valeurs correspondants à ce rapport cyclique. Expérimentalement j'ai obtenue des valeurs variants de 1300 à 1700. Cela m'a juste permit pour le moment de faire un petit programme permettant d'allumer une diode si je met le joystic à droite et de l'éteindre s'il est à gauche.
Le code pour le test de la radiocommande et pour allumer une diode avec :
int val;
void setup()
{
pinMode(2, OUTPUT);
pinMode(A0, INPUT);
Serial.begin(9600);
}
void loop()
{
val = pulseIn(A0, HIGH);
Serial.print(val);
if (val > 1600)
digitalWrite(2, HIGH);
if (val < 1400)
digitalWrite(2, LOW);
delay(500);
}Rien d'extraordinaire pour le moment mais bon au moins ça remonte le moral de voir que la communication entre la télécommande et la Arduino est établie, il reste plus qu'à coder un programme pour la direction des roues, mais ça c'est plus un problème informatique qu'électronique donc ça devrait aller
.Branchement :
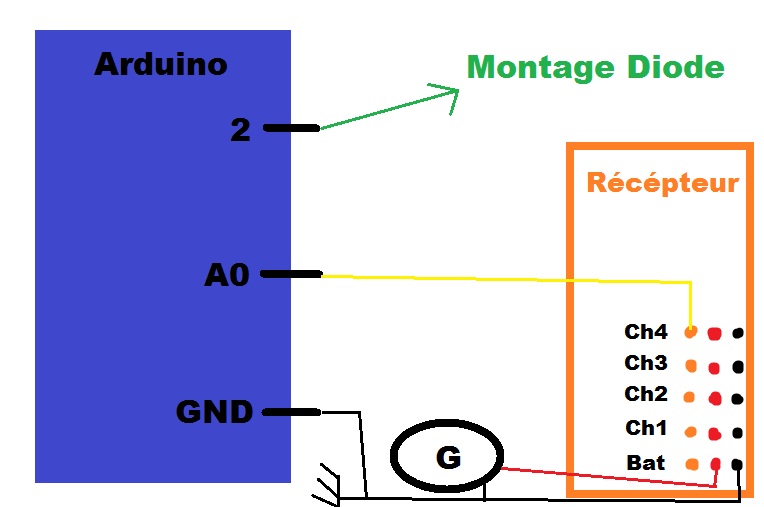
Rien de plus compliqué que ça pour le moment.
Puissance des moteurs :
Pour ça j'utilise un L298
.Voilà voilà pour le moment
 . SI vous avez des questions sur l'utilisation de la télécommande ou de la Arduino n'hésitez pas. Si vous avez des réponses a mon problème sur le L298 n'hésitez pas non plus .
. SI vous avez des questions sur l'utilisation de la télécommande ou de la Arduino n'hésitez pas. Si vous avez des réponses a mon problème sur le L298 n'hésitez pas non plus .



















