La plate forme découpée dans du plexi, est actionnée par 2 servos modifiés pour tourner en continu.
Le microcontroleur est une platine Arduino Uno.
Au départ j'avis disposé des détecteurs de contacts pour contourner les obstacles.
Ensuite j'ai installé une tourelle mue par un servo avec 2 détecteurs sharp IR.
Il s'est averé que le positionnement du servo retardait les mesures de distance.
Actuellement le robot est en cours de modif pour mettre 4 détecteurs IR qui détecteront plus rapidement les obstacles.
Prochainement, je compte adjoindre une petite camera qui me renverrait directemnt la vidéo sur mon PC.
J'aimerai, a partir de la reception image donner des ordres de déplacement au robot. ordres que je donnerai directement; (pas question d'intelligence artificielle)
Mon souci est de savoir ce qui est le plus facile à mettre en oeuvre : WIFI, XBEE, RS232...? Les cartes existent mais j'ai du mal à envisager la complexité de la mise en oeuvre.
Si quelqu'un a une idée pragmatique... je le remercie d'avance sur les infos possibles.
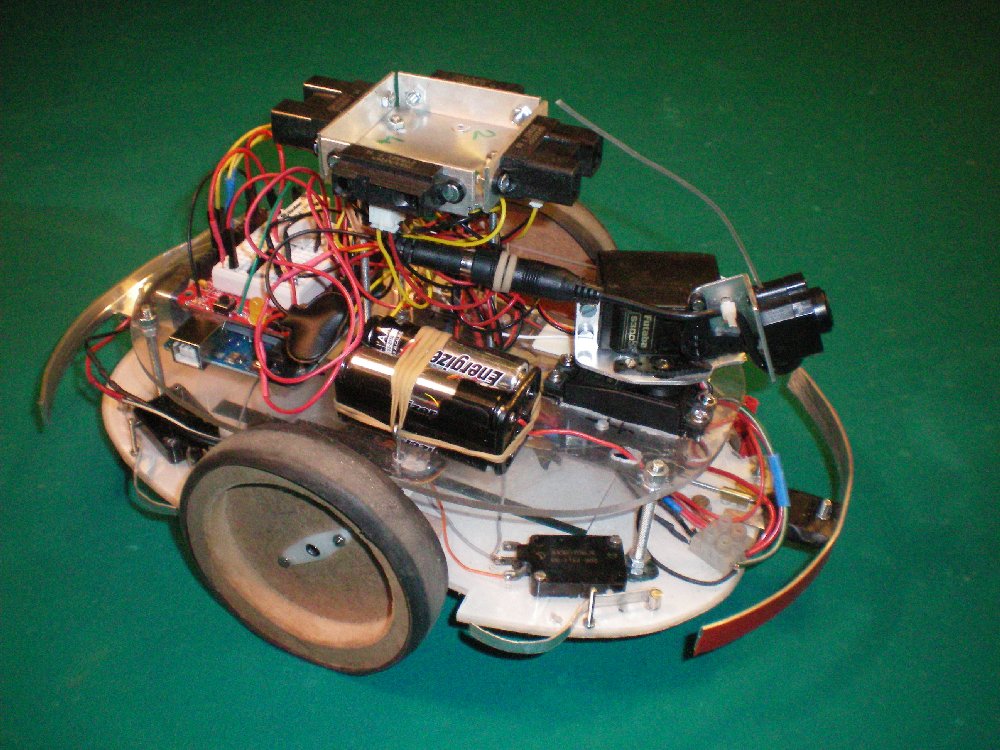
Ci-inclus une photo de la réalisation actuelle
Cordialement
Jac