
Bonjour à tous et bonne année,
Voila, j'ai un projet d'une main robotique ( oui c'est mon premier projet et oui je sais que la main est la partie du corp la plus complexe, mais j'aime les defis ^^)
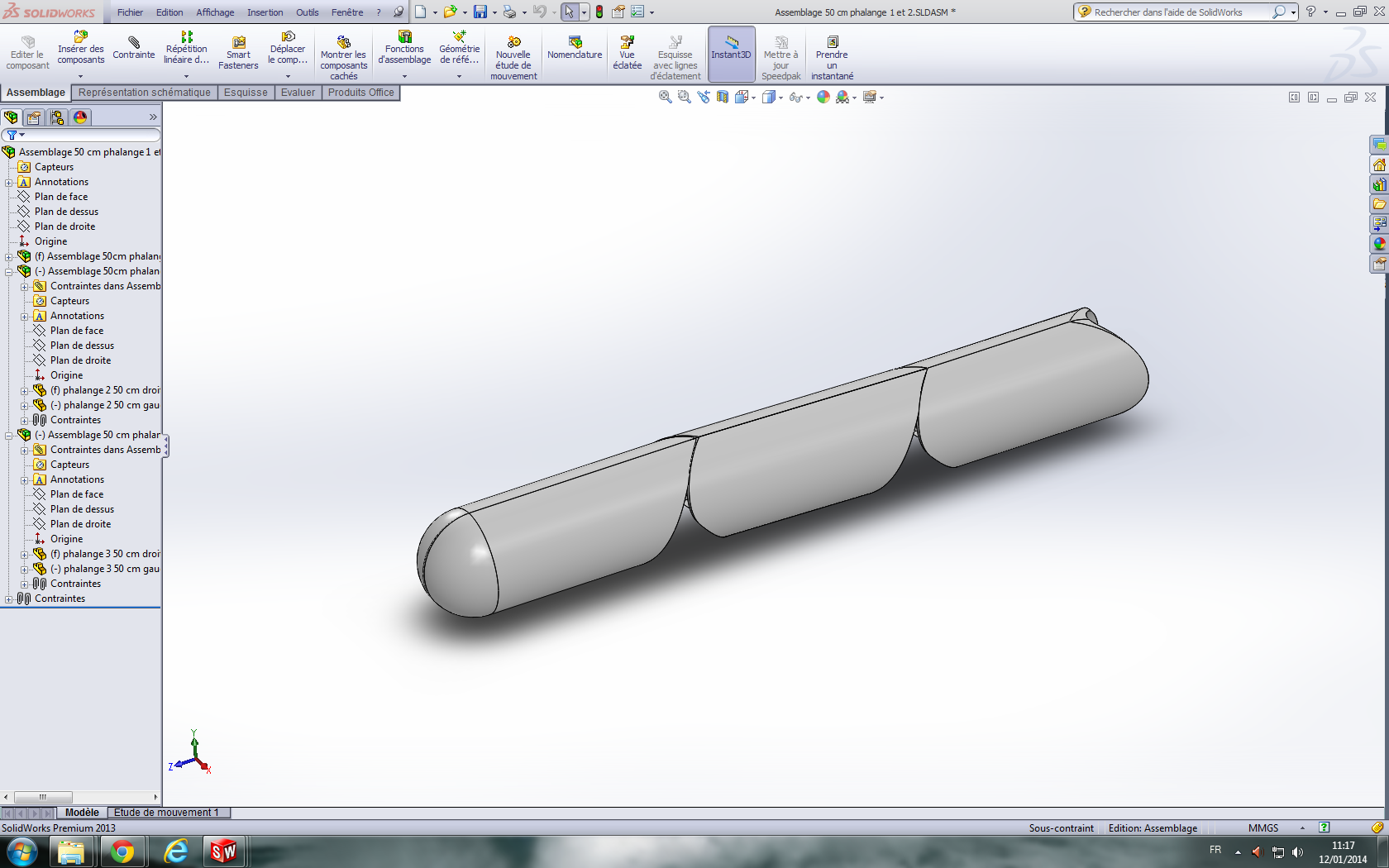
pour cela j'utilise le systeme arduino. j'ai mon programme et mon prototype fais avec des meccanos. maintenant je voudrai le modeliser et le faire faire imprimer grace a une imprimante 3D. j'ai mes modelisation les voila : ( je precise que je suis nul avec solidwork, donc excuser moi pour ces mediocre schema)
version pleinne:
version transparente:
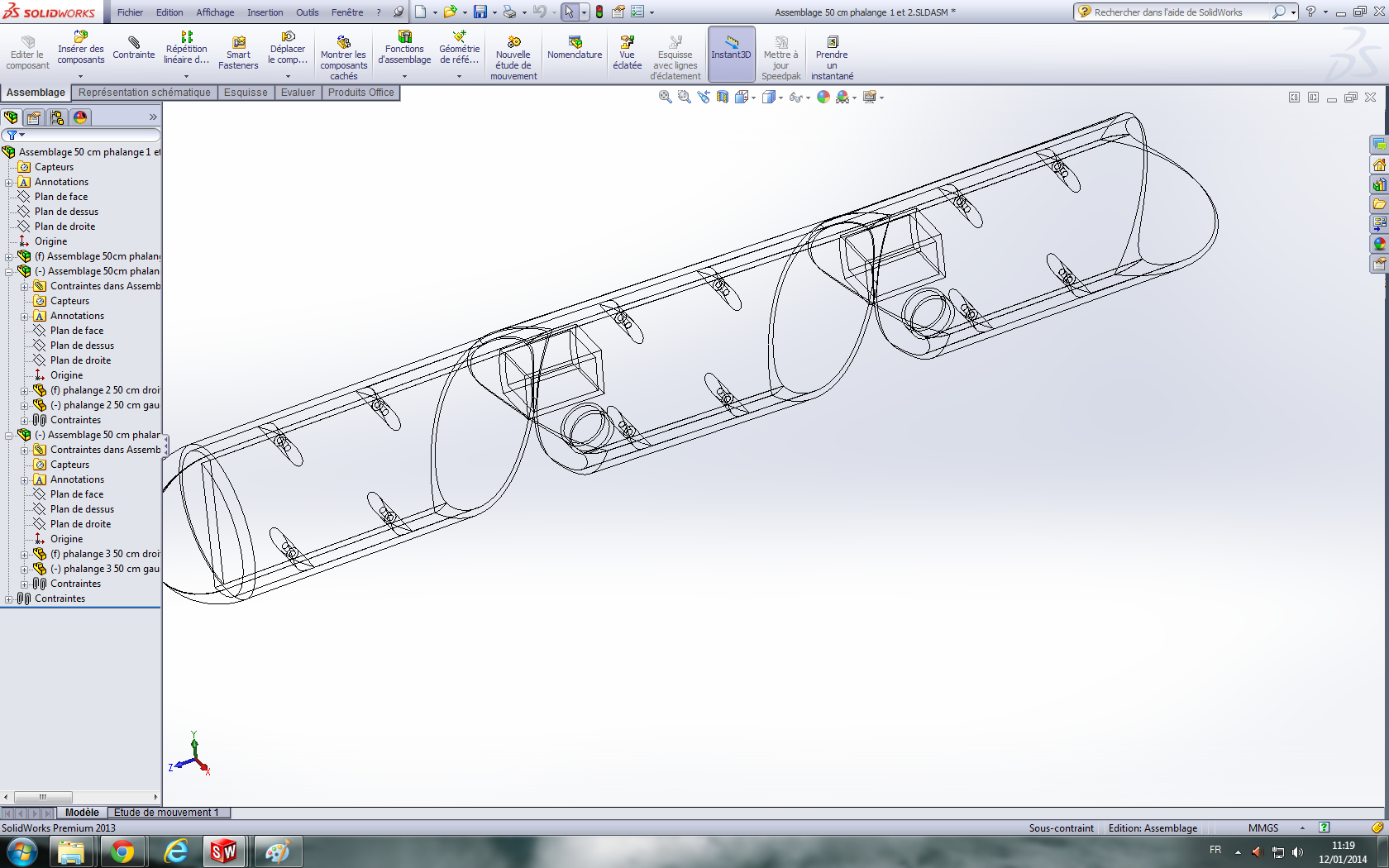
sur la deuxieme photo vous pouvez voir qu'il y as un cercle es un carre a deux endroits. le carre est pour la fixation des deux servomoteur. le cercle est pour la mis en place de roulement a bille.
maintenant le sujet presenter, voici la problematique:
je ne trouve pas de moyen pour faire l'articulation entre les phallanges. j'ai eu plusieur idee mais aucune concluente, pouvez-vous m'aider?
cordialement
Sh0rtY

#1

-
- Membres
- 3 messages
Nouveau membre
- Gender:Male
Posté 12 janvier 2014 - 11:27
Un robot doit obéir aux ordres que lui donne un être humain, sauf si de tels ordres entrent en conflit avec la Première loi.
Un robot doit protéger son existence tant que cette protection n'entre pas en conflit avec la Première ou la Deuxième loi.
#3
-
- Membres
- 3 messages
Nouveau membre
- Gender:Male
Posté 12 janvier 2014 - 12:42
oui, pour moi c'est la meilleur solution pour que le doigt reste a une taille correcte ( actuelement 5cm de diametre) les servo vont dans le carrer ( faire sur mesure) et je penser fixer le bras du servo a une tige qui elle est fixer a la phallange suivante et du coup le roulement a bille serai sur le meme axe de rotation que celui de l'arbre du servo pour faciliter la rotation.
Un robot doit obéir aux ordres que lui donne un être humain, sauf si de tels ordres entrent en conflit avec la Première loi.
Un robot doit protéger son existence tant que cette protection n'entre pas en conflit avec la Première ou la Deuxième loi.
#4
-

- Membres
-

- 411 messages
Membre passionné
Posté 12 janvier 2014 - 05:51
pour ton histoire d'articulation, pourquoi pas un système de charnière ? Si comme tu le dis, tu va faire ça par impression 3D ça serait facile à faire.
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#5
-
- Membres
- 3 messages
Nouveau membre
- Gender:Male
Posté 12 janvier 2014 - 07:23
Un robot doit obéir aux ordres que lui donne un être humain, sauf si de tels ordres entrent en conflit avec la Première loi.
Un robot doit protéger son existence tant que cette protection n'entre pas en conflit avec la Première ou la Deuxième loi.
#6
-

- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 13 janvier 2014 - 04:27
J'aimerais pas recevoir une claque de ta partbonjour,
oui, pour moi c'est la meilleur solution pour que le doigt reste a une taille correcte ( actuelement 5cm de diametre) les servo vont dans le carrer ( faire sur mesure) et je penser fixer le bras du servo a une tige qui elle est fixer a la phallange suivante et du coup le roulement a bille serai sur le meme axe de rotation que celui de l'arbre du servo pour faciliter la rotation.

#7
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 13 janvier 2014 - 04:34
Je ne pense pas que le faite d'utiliser la corde à piano soit la raison pour laquelle ils ne peuvent plier que tout le doigt à la fois, mais plus un choix de construction car pour la main humaine, tu plies quaisment toujours les deux dernière phallanges ensemble, mais si utilise deux corde à piano par phallange (enfin, c'est ce que je ferais), tu peus plier chaque phallange individuellement et ça permet de faire une main de taille plus proche de la main humaine.j'ai vu plusieur personne faire comme tu le dit, avec des corde pour actionner les doigts, mais ils ne peuvent que plier tout le doigt a chaque fois, moi je fais en sorte que chaque phallange soit distinc car on peut garder le doigt droitet juste plier au niveau de la base du doigt et c'est aussi car j'ai dautre projet apres
#8
-

- Membres
-
- 885 messages
Membre chevronné
- Gender:Male
- Location:Racourt et Flaba (08)
Posté 15 janvier 2014 - 06:32
C'est tout à fait vrai ce que mes collègues disent, si c'est faire une main robotique juste pour qu'elle bouge comme une vraie main humaine mais avec des dimensions gigantesques ça n'a pas de sens.
Il y a énormément de source sur le web pour savoir comment faire une main robotique avec des cordes à piano.
Après nous on est là donc hésites pas à demander conseil ! :telephone:/>/>
skyhack.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
#9
-

- Membres
- 49 messages
Membre
- Gender:Male
- Location:marseille
Posté 06 décembre 2014 - 10:19
C'est tout à fait vrai ce que mes collègues disent, si c'est faire une main robotique juste pour qu'elle bouge comme une vraie main humaine mais avec des dimensions gigantesques ça n'a pas de sens.
Il y a énormément de source sur le web pour savoir comment faire une main robotique avec des cordes à piano.
Après nous on est là donc hésites pas à demander conseil ! :telephone:/>/>
skyhack.
super la reponse cela donne vraiment envie de poser des questionis avec une reponse pareil
#10
-
- Membres
- 49 messages
Membre
- Gender:Male
- Location:marseille
Posté 06 décembre 2014 - 10:25
Bonjour à tous et bonne année,
Voila, j'ai un projet d'un main robotique ( oui c'est mon premier projet et oui je sais que la main est la partie du corp la plus complexe, mais j'aime les defis ^^)
pour cela j'utilise le systeme arduino. j'ai mon programme et mon prototype fais avec des meccanos. maintenant je voudrai le modeliser et le faire faire imprimer grace a une imprimante 3D. j'ai mes modelisation les voila : ( je precise que je suis nul avec solidwork, donc excuser moi pour ces mediocre schema)
version pleinne:phalange pleine.png
version transparente:
sur la deuxieme photo vous pouvez voir qu'il y as un cercle es un carre a deux endroits. le carre est pour la fixation des deux servomoteur. le cercle est pour la mis en place de roulement a bille.
maintenant le sujet presenter, voici la problematique:
je ne trouve pas de moyen pour faire l'articulation entre les phallanges. j'ai eu plusieur idee mais aucune concluente, pouvez-vous m'aider?
cordialement
Sh0rtY
bonjour shorty
tu as un tres beau projet et ne t excuse pas de ce que tu as fait avec solide work c est deja super bien
j ai fais moi meme un projet de main robotisé et comme toi je pensais que le doigt etait plier en entier ou pas
mais non car tu met un elastique derriere qui tien le doigt ouvert et apres avec le servo moteur tu commande la fermeture
ici un tres beau projet que j ai imprimé
http://www.thingiverse.com/thing:120585
#11
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 06 décembre 2014 - 10:33
bonjour shorty
tu as un tres beau projet et ne t excuse pas de ce que tu as fait avec solide work c est deja super bien
j ai fais moi meme un projet de main robotisé et comme toi je pensais que le doigt etait plier en entier ou pas
mais non car tu met un elastique derriere qui tien le doigt ouvert et apres avec le servo moteur tu commande la fermeture
ici un tres beau projet que j ai imprimé
Vu que c'est toi qui l'a fait, tu ne vas pas dire qu'il est pas beau  .
.
Plus sérieusement, ton projet semble pas mal, toute fois deux petites remarques :
Tous les doigts semblent de même longueur sur les photos (pas très grave)
La partie pour le pouce n'est pas faite ? C'est celle-ci que je me suis toujours demander comment faire pour qu'elle soit le plus réaliste possible.
Si je n'étais pas dans les robots à roues et chenilles, je me serait aussi lancé dans la réalisation d'une main (pour commencer...).
#12
-

- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 07 décembre 2014 - 09:10
Joli déterrage de sujet. Mais c'est intéressant. Une main géante, pour un robot géant!
Après, il ne faut pas se leurrer sh0rty s'est inscrit le 12 janvier, et s'est connecté pour la dernière fois... le 12 janvier.
Vu que c'est toi qui l'a fait, tu ne vas pas dire qu'il est pas beau
Levend, il faut bien faire la distinction entre concevoir des pièces 3D et les imprimer. Ici ambroise a imprimé des pièces 3D pour faire un doigt, mais des pièces conçues par quelqu'un d'autre sur le web. C'est l'un des intérêts des machines à commande numérique.
D'ailleurs, ambroise, tu t'es acheté une imprimante 3D, ou alors tu utilises une imprimante "partagée"? Dans un fablab/makerspace? Quel modèle d'imprimante si ça n'est pas indiscret?
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




