

Je viens de m'inscrire sur ce forum j'en profite donc pour me présenté un peu. Donc je suis de la regions parisienne en école d'ingénieur et j'aimerais pouvoir réaliser de petit robot afin de m'aider a réaliser certaines taches.
je souhaiterais réalisé un robot qui permettrait de faire des timelapses mouvant. Je voudrais donc partir sur une base de arduino uno et d'un shield moteur que je possède deja. Pour ce qui est du chassis ( 2WD ou 4WD ) je sais pas trop encore quoi prendre de meme que pour les moteur ( pas a pas ou courant continu ). Les trajectoire a réalisé serons très simple du genre ligne droite ou arc de cercle par contre il devra les réaliser a une vitesse très lente qui pourra être régler en fonction de la durée du timelapse voulue. Si je pars sur des moteurs pas a pas il devra donc être en mesure de piloter un reflex par le biais de la prise télécommande situé sur mon reflex. Je sais pas trop encore si il faudrait partir sur un robot a chenille ou a roues juste il devra être le plus stable possible et pouvoir être capable de monté de plus ou moins légère avec le reflex sur le dos.
Le robot devras avoir une assez bonne tete si possible c'est a dire un look plutôt sympa.

Je possède aussi un moteur pas a pas mais bon c'est les gros du coup je pense il ne servira pas pour ce montage.
De plus je souhaiterais si il est possible que le reflex soit lui meme monter sur une plateforme circulaire qui pourrait pivoter sur elle meme enfin se serais vraiment le top après c'est pas forcement nécessaire deja si j'arrive a avoir un bon robot sans sa me conviendrais parfaitement
merci de votre aide et j'espère avoir pleins de réponse de votre part.









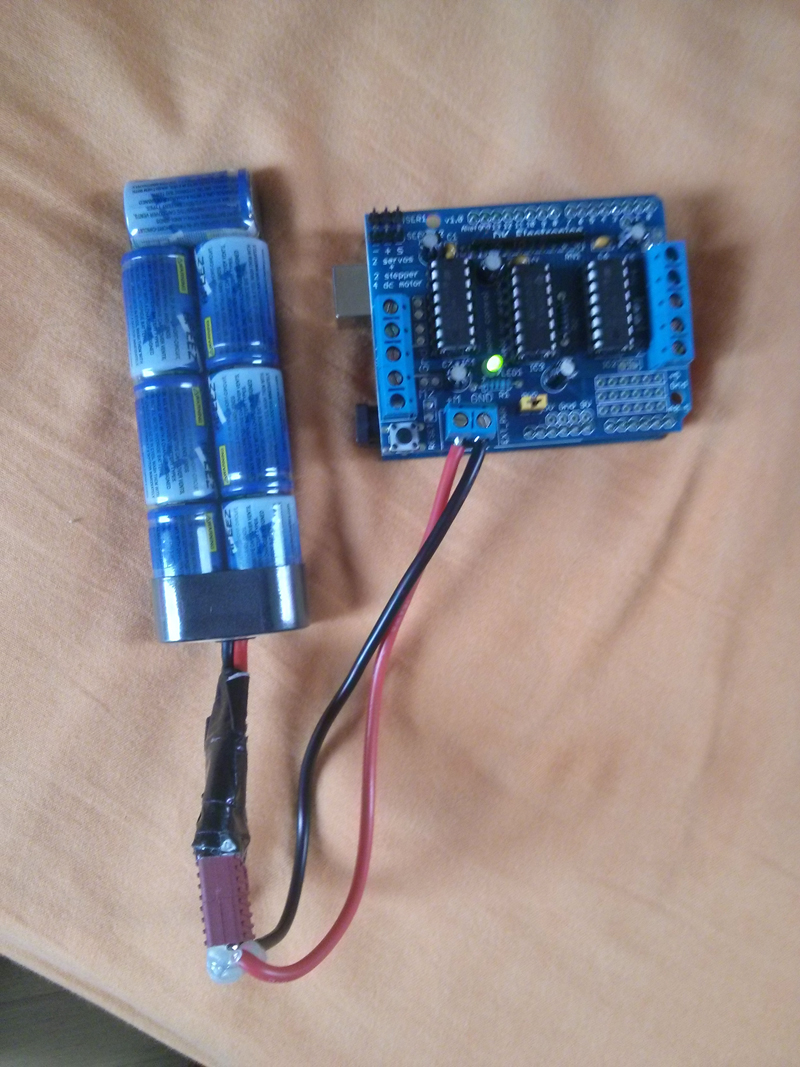


 j'ai vu que les deux board son alumé car les led s'allume et quand je check la tension sortant du port M1 j'ai une variation de -3 volt environ a +3v ce qui devrais faire tourner a l'endroit puis a l'envers comme l'indique le code d'exemple mais cela na marche pas. je me dit que les moteurs on peut etre pas assez de tension mais je trouve sa bizaare car ma nimh qui alimente fournie 7V et jai que -3 +3 en sortie du shield
j'ai vu que les deux board son alumé car les led s'allume et quand je check la tension sortant du port M1 j'ai une variation de -3 volt environ a +3v ce qui devrais faire tourner a l'endroit puis a l'envers comme l'indique le code d'exemple mais cela na marche pas. je me dit que les moteurs on peut etre pas assez de tension mais je trouve sa bizaare car ma nimh qui alimente fournie 7V et jai que -3 +3 en sortie du shield











