Mon contenu
Mon contenu Homme
Homme







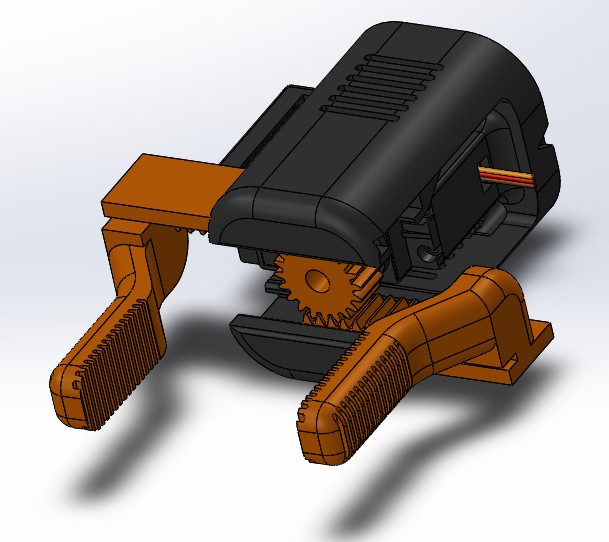
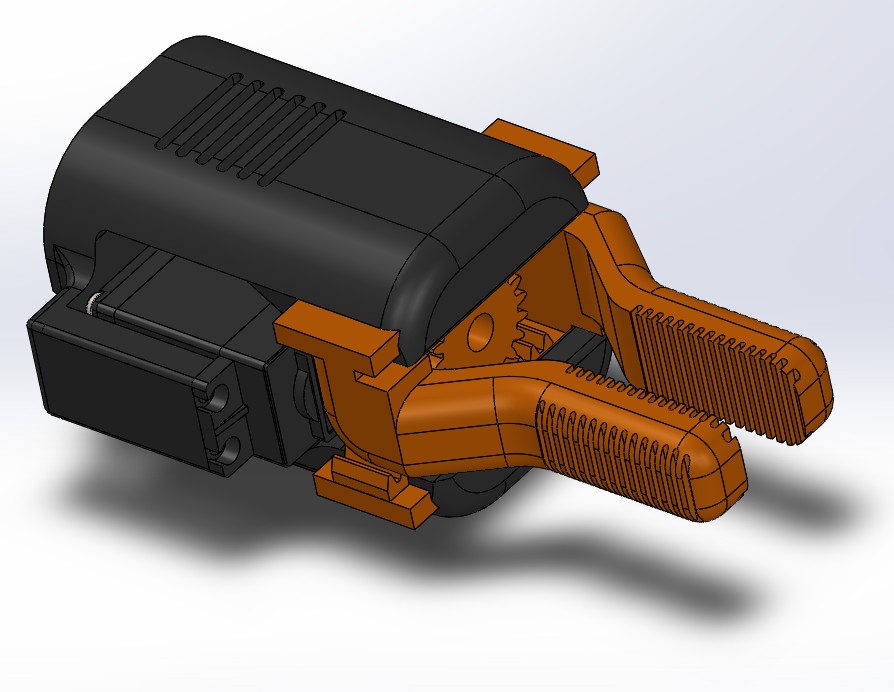
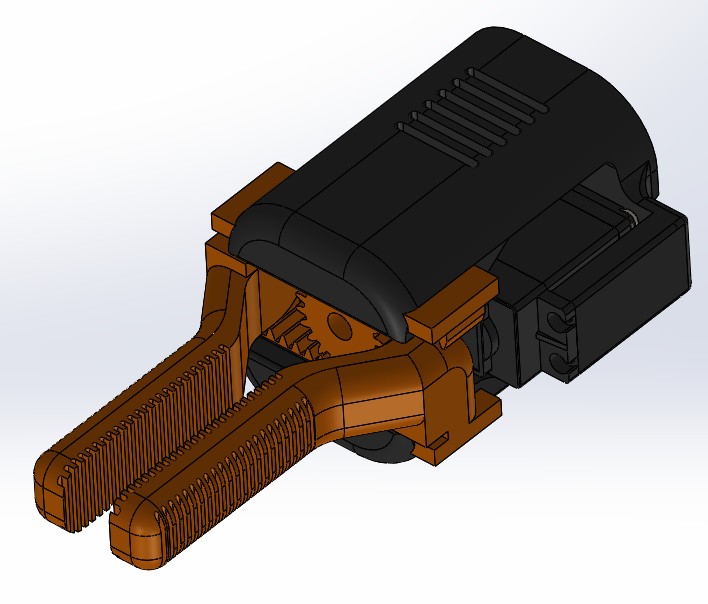
J'ai creusé la poulie pour y coller une tête de servo :
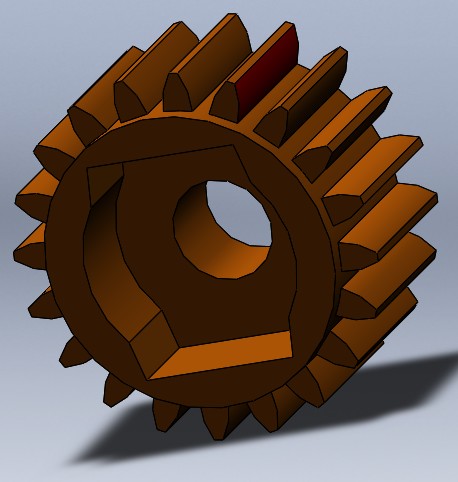
Et j'ai également augmenté la longueur des mâchoires :
- Mike118 aime ceci

 Posté par
- 21 octobre 2018 - 10:09
Posté par
- 21 octobre 2018 - 10:09
J'ai creusé la poulie pour y coller une tête de servo :
Et j'ai également augmenté la longueur des mâchoires :
Posté par
- 16 octobre 2018 - 06:29
Salut 
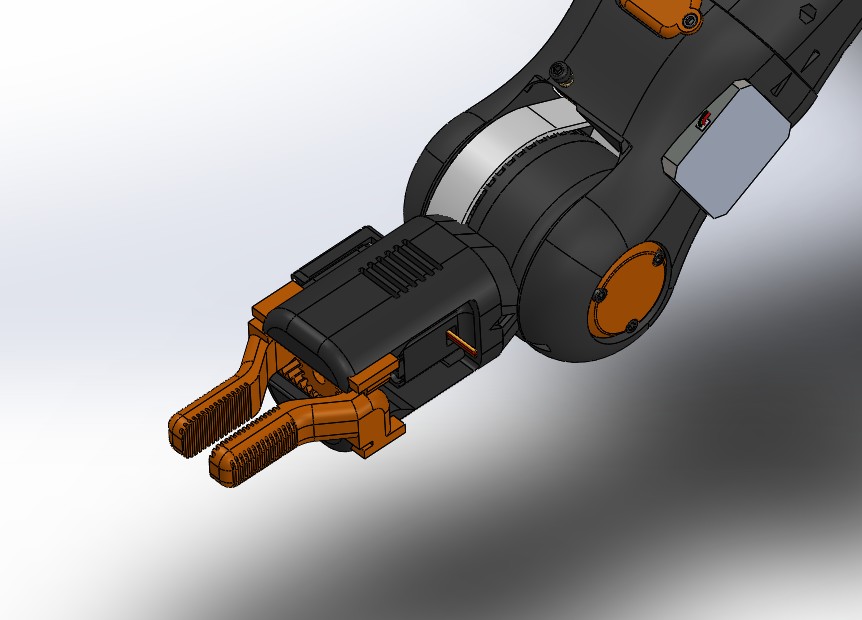
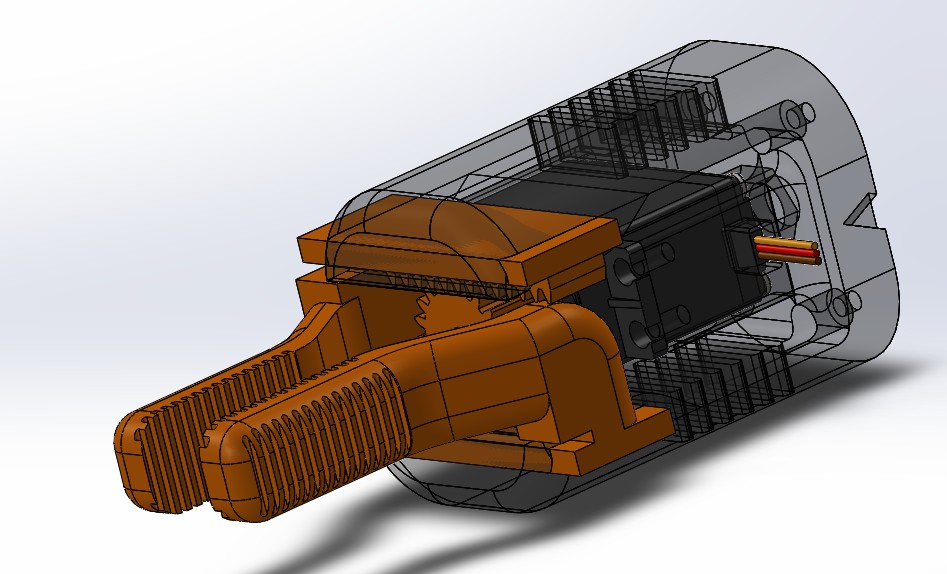
Avant mon déménagement (et petite pause robot) j'avais décidé de refaire une nouvelle pince.
L'objectif de cette nouvelle pince et de supprimer l'effet "qui fonce vers l'avant" de l'ancienne.
En gros actuellement les becs de la pince se déplacent également vers l'avant en pinçant :
c'est gênant lorsque l'on veut prendre une pièce sur une table, il faut à chaque estimer la distance vers l'avant que vont parcourir les becs en fonction de la taille de la pièce a attraper
et je faire quelque chose dans se genre :
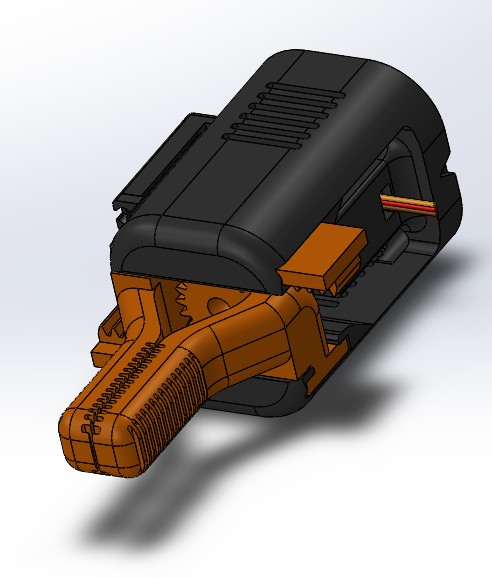
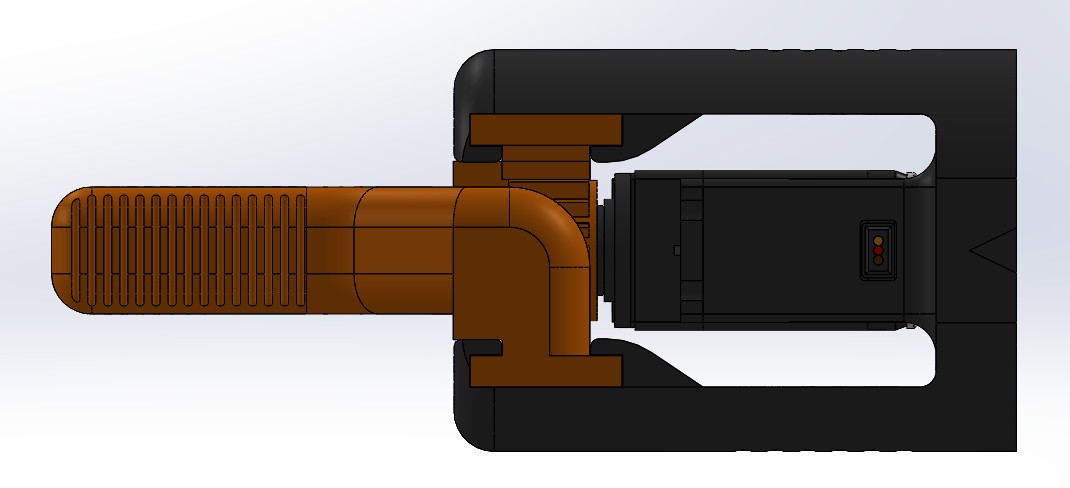
Donc j'ai imaginé quelque chose qui puisse fonctionner avec le servo d'origine (un MG-995) en dimensionnant les pignon/crémaillères pour que le système fonctionne en aillant une ouverture suffisante :
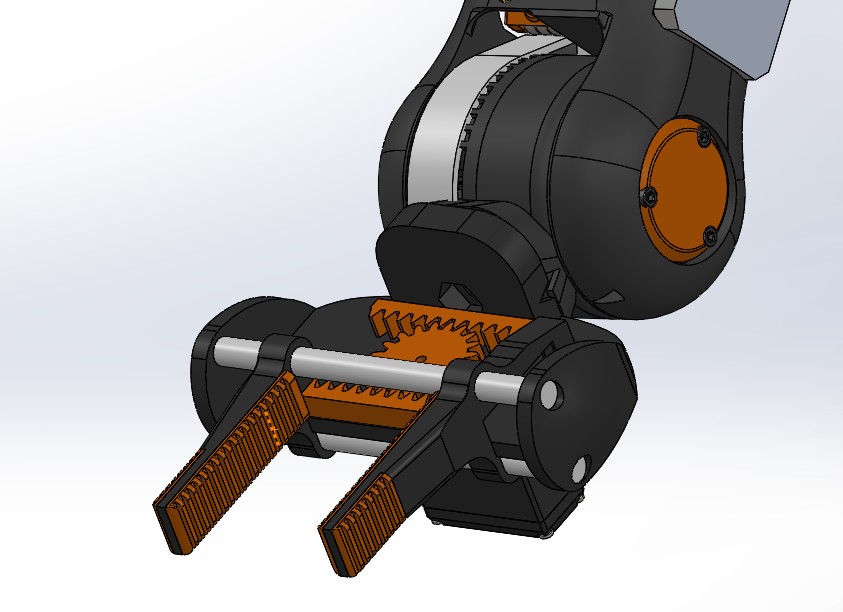
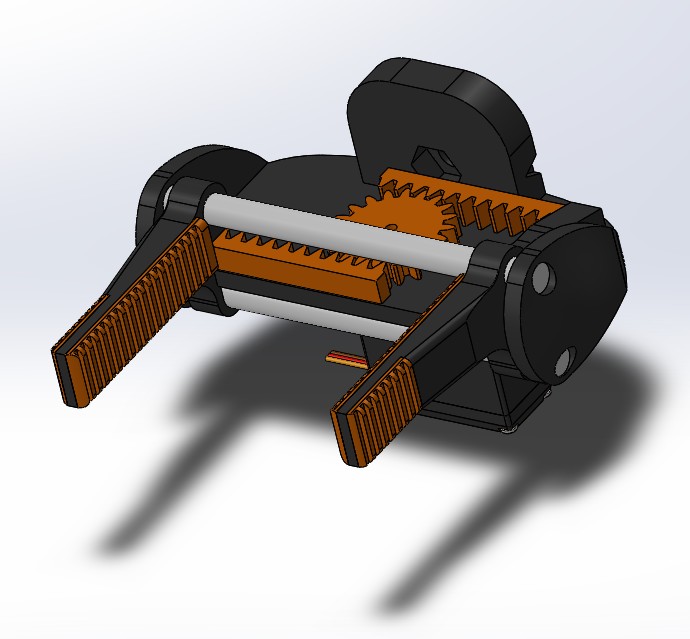
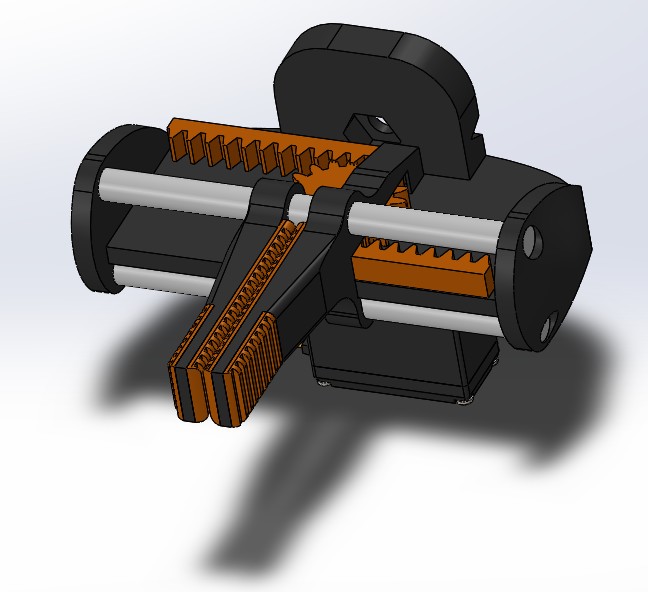
Il y a des mâchoires (en orange) de chaque coté des becs dans l'éventualité que je veuille prendre des objets par l’intérieur.
Je ne suis pas tout à fait convaincu par ma nouvelle pince. Avez vous des idées de comment l'améliorer? des conseils?
Merci 
Posté par
- 26 septembre 2018 - 03:54
Posté par
- 26 septembre 2018 - 10:11
Lorsque l'on lit un sujet sur le forum, nous n'avons plus la possibilité de cliquer sur le bouton "Communauté" (en haut à gauche) pour ensuite cliquer sur "Nouveau contenu" (du forum).
Alors que sur les autres pages, le boutons fonctionnent comme avant.
En gros sur le forum dans les sujets, il n'y a plus les flèches pour dérouler les menus "Communauté" et "Boutique des Makers".
Posté par
- 16 juillet 2018 - 06:05
Posté par
- 09 juillet 2018 - 08:45
Posté par
- 09 juillet 2018 - 10:25
Posté par
- 05 juillet 2018 - 07:45
Posté par
- 10 mai 2018 - 08:44
Posté par
- 07 mai 2018 - 09:26
Posté par
- 04 mai 2018 - 11:41
Posté par
- 01 mars 2018 - 05:06
Salut
Finalement après réflexion, je ne vais pas envoyer toute la trame d'un coup au robot pour lui donner du boulot pendant un certain temps.
Je préfère envoyer chaque trame à la suite afin de pouvoir annuler plus facilement des mouvements via l'application.
J'ai donc réussi à me dépatouiller avec ceci :
void Bluetooth(){
Serial1.write("ok"); // envoi en Bluetooth "ok" pour signaler que l'application peut envoyer une trame
String trame = "";
if (Serial1.available() > 0){ // regarde si il y a une trame disponible
trame = Serial1.readStringUntil('$');
Serial1.write("non"); //envoi en Bluetooth "non" pour que l'application ne renvoi pas une autre trame
trame = Serial1.readStringUntil(',');
nouvelles_positions[0] = trame.toFloat();
trame = Serial1.readStringUntil(',');
nouvelles_positions[1] = trame.toFloat();
trame = Serial1.readStringUntil(',');
nouvelles_positions[2] = trame.toFloat();
trame = Serial1.readStringUntil(',');
nouvelles_positions[3] = trame.toFloat();
trame = Serial1.readStringUntil(',');
nouvelles_positions[4] = trame.toFloat();
trame = Serial1.readStringUntil('f');
nouvelle_position_pince = trame.toFloat();
Mouvements_moteurs(nouvelles_positions[0], nouvelles_positions[1], nouvelles_positions[2], nouvelles_positions[3], nouvelles_positions[4]);
position_pince = nouvelle_position_pince;
servo_pince.write(position_pince);
}
delay(100);
}
et l'application (clic droit --> "Ouvrir le lien dans un nouvel onglet" pour voir en plus grand) :

L'application envoie la trame seulement si elle reçoit "ok". Vu que lorsqu'elle envoie une trame, elle reçoit "non" par le robot, elle va attendre. Le robot aillant ensuite fini son action, renvoie à son tour un "ok" et c'est reparti.